


Sådan fungerer Robonauts
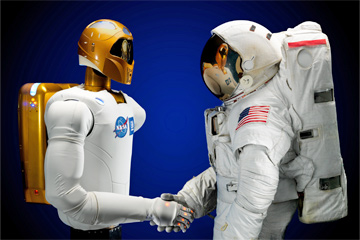
Foto høflighed NASA
Robonaut 2 (til venstre) blev den første ikke -menneskelige til at besøge den internationale rumstation. R2 fik en tur til rummet ombord på shuttlen den 24. februar kl. 2011. Se flere astronautbilleder.
Det er svært at forestille sig en mere dramatisk virksomhed end rumrejser, hvor modige sjæle forsegler sig selv i fantastiske køretøjer og bliver sendt af kontrollerede eksplosioner ind i et miljø fjendtligt mod alt kendt liv - alt sammen i videnskabens og menneskets vovelsens navn.
At lande et rumskib på månen ville ikke have været det samme uden astronauter. Gennem deres kommentarer, mennesker på Jorden, der så de kornete sort-hvide billeder af månelandskabet, delte en forbindelse til det evige og til det udenjordiske. Deres rejse gav os en fælles oplevelse større end noget Hollywood kunne skabe, fordi det var virkeligt.
Rumfart tager sin vej af astronauter, fordi menneskekroppen ikke er egnet til de hårde forhold, der styrer verden ud over vores atmosfære. Inde i en kapsel eller shuttle, rumrejsende skal regelmæssigt dyrke motion for at afværge knogletæthedstabet og muskelatrofi forårsaget af længere perioder i mikrogravitation. Besætningsrummene skal sættes under tryk med den rigtige blanding af åndbare gasser og vanddamp, og systemer skal cirkulere og genoplive disse gasser for at holde luften åndbar. Temperaturen skal også omhyggeligt reguleres, for ikke at sige noget om systemer til levering af mad og vand og bortskaffelse af affald.
relaterede artikler
- Fordelt:Astronaut Quiz
- Hvor længe kan et menneske overleve i det ydre rum?
- Sådan fungerer rumdragter
Uden for, astronauter støder på temperaturer, der kan svinge fra 248 grader F (120 grader C) til minus 148 grader F (minus 100 grader C), og det er lige nær Jorden. Temperaturen i dybt rum styrter til minus 454 grader F (minus 270 grader C). Uden Jordens atmosfære for at beskytte dem mod solens stråling, astronauter overlever ved at bære omfangsrige rumdragter, der koster millioner af dollars stykket og ikke er praktiske i en nødsituation. Hvis den internationale rumstation (ISS) blev ramt af en genstand og skulle repareres med det samme, det ville tage en astronaut timer at forberede en rumvandring og udføre reparationer [kilde:Coulter, "Robonaut 2 lanceret i februar"].
NASA og andre rumprogrammer anerkender den menneskelige krops skrøbelighed og arbejder på måder at få mest muligt ud af deres astronauters tid og samtidig reducere deres eksponering for fare. En af de mere spændende tilgange, der er i gang, har givet anledning til en ny race af astronaut, en bedre egnet til at overleve uden for rumfartøjer.
I denne artikel, vi lærer om udviklingen af disse robot -astronauter, eller robonauter , og hvordan de vil hjælpe mennesker i rummet.
JEG, Robonaut
Robotsonder og rovere har rejst til Mars siden før vi landede på månen. I 1965, Mariner IV sendt de første nærbilleder af den røde planet tilbage. I 1997, det Stifinder rover gav enestående detaljer om Mars 'atmosfære og overflade. I øvrigt, hvem kan glemme de bemærkelsesværdige bidrag fra Ånd og Lejlighed , de to Mars -rovere, der blev lanceret i sommeren 2003, og som så overgik deres oprindelige mission?
NASA har baseret sine robot -astronauter på et humanoid design. Den første af disse, Robonaut 1 (alias R1 ), bød på et hoved, to øjne, to arme og to femcifrede hænder. Designere beskyttede R1's hoved med en hjelm af epoxyharpiks og monterede hovedet på en leddet hals, som gjorde det muligt at vende fra side til side og se op og ned. Inden for den banebrydende robonaut, to videokameraer leveret stereovision til operatøren og gav R1 mulighed for at spore objekter. Stereovision efterligner menneskelig vision ved at sammenligne billeder fra et højre og venstre "øje" (kamera) og bruge parallaks - den tilsyneladende forskel i et objekts position forårsaget af den forskellige synsvinkel på hvert øje- for at bestemme dybde og registrere bevægelse. R1's arme var i stand til et større bevægelsesområde end menneskelige arme og pakkede mere end 150 sensorer hver.
NASA begyndte at bygge R1 i 1997, og det fungerede som en eksperimentel platform i laboratorie- og felttest indtil 2006. Det var et vellykket bevis på koncept, men det forlod aldrig laboratoriet.
I 2006, NASA underskrev en aftale med General Motors om at producere Robonaut 2 ( R2 ). GM udviklede også fingerfærdige robotter på det tidspunkt og havde arbejdet sammen med NASA om månens rover. NASA afslørede R2 i februar 2010, og robonauten rejste til sit permanente hjem på den internationale rumstation 24. februar, 2011, på en af de sidste rumfærge -missioner.
Ligesom R1, R2 er designet til at hjælpe mennesker og automatisere gentagne, kedelige eller trættende opgaver - såsom opsætning af værktøjer og udstyr, der er nødvendigt for missioner - frigør astronauter til at koncentrere sig om opgaver, som kun de er kvalificerede til at udføre.
Tænk på R2 som R1-plus-mindre, billigere, mere avanceret og i stand til at overleve påbegyndelsens strenge og rum. R2 leverer mere end 350 sensorer, 40 hvoraf den bruger til at opdage sine omgivelser. Det inkluderer fire kameraer med synligt lys i øjnene og et femte infrarødt kamera i munden for at hjælpe med dybdegående opfattelse. Dens mave indeholder 38 computerprocessorer. Selvom dens styrke er på niveau med R1'er - den kan løfte omkring 9 kilo - er R2 mere dygtig med sine praktiske vedhæng:Mens R1's hænder lignede en astronauts handsker, R2 er mere som uelskede menneskehænder.
R2 kan manipulere et tæppe, tag en konvolut og tag fat i en håndvægt, men dens fingerfærdighed er større end summen af dens dele. Brugere kan kontrollere R2's ledstivhed, som giver R2 et ben op over typiske "positionsstyrede" robotter som automobilsamlingsrobotter, der mangler "give" i deres systemer og skal stille sig perfekt op for at udføre deres job. Sådan en robot ville være elendig til at sætte en pind i et hul; selv en lille forskydning ville få den til at smadre pinden ind i området omkring hullet. R2, omvendt, kan "føle" sin vej hjem, bevæger tappen blødt frem og gør små, glidende korrektioner, hvis de er forkert justeret, som et menneske ville. R2's fleksibilitet gør det også mere sikkert for sine menneskelige ledsagere, hvem kan stoppe dens bevægelse uden megen kraft, derved undgå skader.
Her er specifikationerne for Robonaut 1 og 2:
specifikationer Robonaut 1
Robonaut 2
Højde 6,3 fod (1,9 meter) 3,33 fod (1,0 meter) (talje til hoved) Vægt 410 pund (182 kilo) 330 pund (150 kilo) Strukturelle materialer
For det meste aluminium med Kevlar og teflon polstring for at beskytte det mod brand og snavs Primært aluminium med stål, forniklet kulfiber og nonmetallics Computer platform
PowerPC -processor38 PowerPC -processorer Operativ system
VxWorksVxWorks
Robonauts:Kontrollerer rumets fremtid?
Ud over NASAUanset fremtiden for robonauter, konkurrencen varmer op som en shuttle ved genindrejse.
- European Space Agency opdaterer sin Eurobot med fire hjul, to arme, udskiftelige hænder med værktøj, et avanceret navigationssystem, kameraer og sensorer. Agenturet overvejer også delvist at transformere robotter, såsom en rover med hjul, der bliver til fødder.
- Kina håber at sende en ubemandet rover til månen inden 2012 og starte en robotmission for at bringe prøver tilbage i 2017.
- Japan har sagt, at det ønsker at sætte en tobenet robot på månen inden 2015 og bygge en månebase inden 2030.
Robonaut 2 (R2), ligesom sin forgænger, styres ved hjælp af telepresence, hvor en person - enten en astronaut eller en operatør ved missionskontrol - fjernleder robotten, mens den ser gennem øjnene via indbyggede kameraer. Operatøren kan bære handsker for at betjene R2s hænder, eller styre R2s hovedbevægelser ved at bære en hjelm, der er fjernbundet til robotens hoved.
R2 er ikke bare marionet, imidlertid. Ligesom Mars -roverne, robonauten opererer også under overvåget autonomi, hvilket betyder, at den er fyldt med sekvenser af kommandoer (scripts), der fortæller den, hvordan man udfører bestemte opgaver autonomt. En operatør overvåger sin fremgang under disse handlinger og kan foretage korrektioner efter behov i realtid. Håbet er, at R2 en dag vil blive uddannet fra robo-trainee til robo-medarbejder og kræver meget lidt observation eller retning.
Ligesom R1, R2's hjerner består af en række PowerPC-processorer-en teknologi, der bruges i andre rumapplikationer-der kører VxWorks-operativsystemet i realtid. NASA siger, at denne kombination tilbyder fleksibel computing og understøtter varierede udviklingsaktiviteter. Systemsoftwaren er skrevet i C og C ++. ControlShell -software hjælper udviklingsprocessen og giver et grafisk udviklingsmiljø, hvilket forbedrer forskernes forståelse af systemet og koden.
I første omgang, R2 vil være begrænset til et laboratorium på den internationale rumstation. Der, det vil køre tests ved hjælp af en række tavler med kontakter, knapper og stik som dem astronauterne betjener. Ingeniører på jorden sender hardware- og softwareopdateringer efter behov. Til sidst, R2 vil være udstyret med et eller flere ben komplet med tæer, der passer til tåholdere, der er indbygget i stationens vægge, hvilket gør det muligt for R2 at klatre, mens hånden er fri til at bære udstyr eller udføre opgaver.
Til sidst, R2 vil modtage ekstravehicular activity (EVA) udstyr og vil kunne tage rumvandringer uden for stationen. Det vil derefter være i stand til at oprette arbejdspladser og reducere den tid, mennesker skal bruge udenfor. Fordi det kan overgå meget hurtigere til det ydre end astronauter, R2 vil også kunne reagere på nødsituationer. NASA arbejder på et batteri (i øjeblikket skal R2 tilsluttes) for at øge R2's rækkevidde, og fremtidige robonauter kunne være udstyret med hjul eller endda en jetpack til efterforsknings- og vedligeholdelsesopgaver. Håndterlige robotter som R2 vil heller ikke være begrænset til at udforske rummet:En dag, de kan komme ind på farlige steder på Jorden i stedet for mennesker, som vulkaner og atomkraftværker.
Gå til næste side for mere robotlæsning, du måske kan lide.
Masser mere information
relaterede artikler
- Fordelt:Astronaut Quiz
- Sådan fungerer rumdragter
- Sådan fungerer rumstationer
- Hvor længe kan et menneske overleve i det ydre rum?
- Sådan fungerer robotkirurgi
Flere store links
- Johnson Space Center
- NASA Robonaut YouTube -kanal
- NASA Robotics hjemmeside
- Robonaut 2 -startside
- RoboSapiens:Robonaut
Kilder
- Chang, Kenneth. "NASAs søgen efter at sende en robot til månen." New York Times. 1. november kl. 2010. (3. maj, kl. 2011)
http://www.nytimes.com/2010/11/02/science/space/02robot.html - Coulter, Dauna. "NASA skitserer store planer for humanoid robot." NASA Science News. 29. april kl. 2010. (4. maj, kl. 2011)
http://science.nasa.gov/science-news/science-at-nasa/2010/29apr10_r2/ - Coulter, Dauna. "Robonaut 2 lanceres i februar." NASA Science News. 31. januar, 2011. (4. maj, kl. 2011)
http://science.nasa.gov/science-news/science-at-nasa/2011/31jan_r2/ - Dekan, Brandi. Offentlige Anliggender, NASA - Johnson Space Center. Personlig korrespondance. 5. - 10. maj, 2011.
- European Space Agency. "Robotter transformerer arbejde i rummet." 1. september, 2010. (3. maj, kl. 2011)
http://www.esa.int/esaKIDSen/SEMKH5WNPBG_LifeinSpace_0.html - General Motors (via PR NewsWire). "Robonaut 2 ankommer til den internationale rumstation." New York Times. 25. februar kl. 2011. (2. maj, kl. 2011)
http://markets.on.nytimes.com/research/stocks/news/press_release.asp
? docTag =201102250900PR_NEWS_USPRXDE54767 &feedID =600 &
tryk_symbol =27294563 - Jha, Alok. "Mød Robonaut 2, Astronautassistent. "The Guardian (Storbritannien). 2. november, 2010. (3. maj, kl. 2011)
http://www.guardian.co.uk/science/2010/nov/02/robonaut-2-international-space-station - Mehling, Joshua. Robonaut projektingeniør. Personlig korrespondance. 9. maj kl. 2011.
- Moseman, Andrew. "Japansk konsortium:Vi sender en humanoid robot til at gå på månen." Oplev Magazine 80 Beats blog. 4. maj kl. 2010. (3. maj, kl. 2011)
http://blogs.discovermagazine.com/80beats/2010/05/04/japanese-consortium-well-send-a-humanoid-robot-to-walk-on-the-moon/ - NASA. "Autonom drift af ISS Task Board." 18. februar kl. 2011. (4. maj, kl. 2011)
http://www.youtube.com/watch?v=Z0k8YVTrXVs - NASA. "Human Space Flight:Environmental Control and Life Support System." (17. maj kl. 2011)
- NASA. "#NASATweetup:STS -133 Discovery - Robonaut 2 Demo Part I." 4. november kl. 2010. (5. maj, kl. 2011)
http://www.youtube.com/watch?v=Z78QUUioRzI - NASA. "#NASATweetup:STS -133 Discovery - Robonaut 2 Demo Part II." 5. november kl. 2010. (5. maj, kl. 2011)
http://www.youtube.com/watch?v=bJ187uUib2o - NASA. "#NASATweetup:STS -133 Discovery - Robonaut 2 Demo Del III." 5. november kl. 2010. (5. maj, kl. 2011)
http://www.youtube.com/watch?v=6sXHz3T9rn8 - NASA. "#NASATweetup:STS -133 Discovery - Robonaut 2 Demo Part IV." 5. november kl. 2010. (5. maj, kl. 2011)
http://www.youtube.com/watch?v=69ttCyfgFAY - NASA. "NASA og GM tager et kæmpe spring fremad i robotteknologi." 13. juli kl. 2010. (5. maj, kl. 2011)
http://www.youtube.com/watch?v=hrxcJn_EcG4 - NASA. "NASAFacts:Robonaut 2." (4. maj kl. 2011)
http://www.nasa.gov/pdf/464887main_Robonaut2FactSheet.pdf - NASA. "NASA lancerer R2 for at deltage i rumstationsbesætningen." 13. juli kl. 2010. (3. maj, kl. 2011)
http://www.youtube.com/watch?v=vfhS_st5ams - NASA. "Robonaut 2." (2. maj kl. 2011)
http://robonaut.jsc.nasa.gov/ - NASA. "Robonaut 2:En drøm realiseret." 2. marts 2011. (2. maj, 2011)
http://www.youtube.com/watch?v=kepkSnrSec0 - Vause, John. "Kinas ambitiøse planer i rummet." CNN. 26. november kl. 2007. (4. maj, kl. 2011)
http://articles.cnn.com/2007-11-26/tech/china.space.race_1_chang-e-helium-3-lunar-orbiter?_s=PM:TECH
 Varme artikler
Varme artikler
-
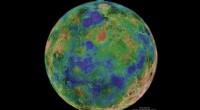 Venus:Earths Blazing-hot og Bizarre TwinDenne halvkuglevisning af Venus, som blev oprettet ved hjælp af mere end et årti med radarundersøgelser, der kulminerede i Magellan-missionen 1990-1994, viser planetens nordpol. NASA/JPL/USGS Efter m
Venus:Earths Blazing-hot og Bizarre TwinDenne halvkuglevisning af Venus, som blev oprettet ved hjælp af mere end et årti med radarundersøgelser, der kulminerede i Magellan-missionen 1990-1994, viser planetens nordpol. NASA/JPL/USGS Efter m -
 10 bemærkelsesværdige eksoplaneterDenne exoplanet, WASP-12b leger med ild. Tak til Hubble, vi kan se, at WASP-12b langsomt forbruges af sin værtsstjerne. Yderligere 10 millioner år eller deromkring, og det er en goner. Se flere billed
10 bemærkelsesværdige eksoplaneterDenne exoplanet, WASP-12b leger med ild. Tak til Hubble, vi kan se, at WASP-12b langsomt forbruges af sin værtsstjerne. Yderligere 10 millioner år eller deromkring, og det er en goner. Se flere billed -
 Opdaget! Icy Super-Earth på Barnards Star,Vores Suns Nabo Kunstners indtryk af overfladen af en superjord, der kredser Barnards Star ESO/M. Kornmesser Vi har observeret en fremmed verden, der kredser om Barnards stjerne, en lille r
Opdaget! Icy Super-Earth på Barnards Star,Vores Suns Nabo Kunstners indtryk af overfladen af en superjord, der kredser Barnards Star ESO/M. Kornmesser Vi har observeret en fremmed verden, der kredser om Barnards stjerne, en lille r -
 Falcon Heavy Launch Stor succes for SpaceXSpaceXs succesrige Falcon Heavy -raket -test lanceret i Jordens atmosfære tirsdag, 6. februar kl. var en total game changer. SpaceX Da Falcon Heavy -raketten med succes rumlede fra sin Florida -affyr
Falcon Heavy Launch Stor succes for SpaceXSpaceXs succesrige Falcon Heavy -raket -test lanceret i Jordens atmosfære tirsdag, 6. februar kl. var en total game changer. SpaceX Da Falcon Heavy -raketten med succes rumlede fra sin Florida -affyr