


Slangerobotter til at hjælpe astronauter

Kredit:billede fra ISS / NASA. Illustration af slangerobot:SINTEF / M. Bjerkeng og O.H. Holhjem
Norske forskere undersøger, hvordan en slangerobot kan udføre vedligeholdelsesarbejde på den internationale rumstation (ISS), undersøg kometer, og undersøge muligheden for at leve og arbejde i lavatunneler på Månen.
For tre år siden undersøgte SINTEF, om slangerobotter kunne hjælpe astronauter, der arbejder på Mars med mobilitet og adgang. Som en del af et projekt bestilt af ESA, forskere skal fortsætte med dette arbejde og udfører en forundersøgelse for at undersøge teknologien og andre muligheder for at udnytte robotter i rummet.
"Mere ambitiøse applikationer omfatter potentielle aktiviteter på kometer og månen", siger Aksel Transeth hos SINTEF. Snake robot ", der kan hjælpe ISS astronauter med at vedligeholde deres udstyr, er måske en løsning, som kan realiseres på mere kort sigt."
Moon Village
Det er næsten 50 år siden de første mænd gik på månens overflade. ESA mener, at menneskehedens næste store skridt kan være et fælles globalt projekt, der sigter mod at etablere en bosættelse på Månen - en "måneby". En sådan løsning kan udgøre et permanent grundlag for videnskabelig aktivitet, forretning, turisme eller minedrift, og det mest sandsynlige sted for en sådan base vil være i lava -rør, eller tunneler, hvor smeltet sten engang flød.
Byggeri i lava -rør vil betyde, at nybyggere vil blive beskyttet mod skadelig eksponering for kosmisk stråling og meteoritter.
Imidlertid, sådanne tunneler skal inspiceres for at sikre, at det er muligt for mennesker at bo og arbejde i dem, og det er her slangrobotterne kan have en rolle at spille. Tyngdekraften er svagere på Månen. I øvrigt, lava -rør kan falde lodret fra overfladen. Så hvordan vil det være muligt at lette adgang og mobilitet?
Undersøger kometer
ESA er også interesseret i at studere kometer. Da kometer kommer fra yderområderne i det ydre rum, forskere håber at afdække nogle af solsystemets mysterier, og at få hjælp til at danne et billede af, hvordan det så ud, før planeterne blev dannet.
I 2004, ESA lancerede Rosetta -rumsonde, og i 2014 frigav sonden Philae -landeren på kometen 67P/Tsjurjumov – Gerasimenko. Landeren var udstyret med et system med harpuner designet til at holde den på plads ved landing. Desværre, dette lykkedes ikke.
"Der er stort set ingen tyngdekraft på en komet", siger Transeth. "Hvis du prøver at gå på overfladen, du kan blive kastet ud i rummet ", han siger. "Så vi er nødt til at finde måder, hvorpå slangerobotter kan bevæge sig rundt på en komet, samtidig med at de holder sig fast på overfladen", siger Transeth.
Inspektion og vedligeholdelse på ISS
Men for nutidens SINTEF -forskere, det er slangerobotterne på ISS, der repræsenterer deres mest naturlige og realistiske projekt på kortere sigt. Der er ingen problemer med ekstreme temperaturer på ISS, som til enhver tid er besat.
Astronauter udfører eksperimenter sendt til dem i kasser af deres kolleger på Jorden, og disse forsøg skal udføres i en tilstand af vægtløshed. For eksempel, hvilke planter kan vokse i rummet? Hvordan heler sår i sådanne omgivelser?
Dette er astronauternes hovedopgaver, men de har også deres arbejde afskåret ved at inspicere og vedligeholde alt det udstyr, der er nødvendigt for at holde rumstationen i drift. Alt, der sparer dem tid i løbet af deres hektiske skema, er guld værd.
"Det er muligt, at en robot kan udføre noget af det rutinemæssige inspektions- og vedligeholdelsesarbejde", siger Transeth. "Forsøgene er stablet i hyldesektionerne, bag hvilken korrosion kan forekomme. For at finde ud af dette, inspektioner skal foretages. En slangerobot kunne krybe bag sektionerne, foretage en inspektion, og måske endda udføre små vedligeholdelsesopgaver ", han siger.
Ruller op, kryber og strækker sig
Der er ingen mangel på udfordringer, som forskere står over for at forsøge at udvikle et inspektions- og vedligeholdelsesslangerobotsystem. En vigtig faktor er at finde ud af, hvordan en slangerobot kan komme rundt i ISS. Da ISS er i en konstant tilstand af frit fald rundt om jorden, astronauter "flyder" rundt på stationen, bevæger sig rundt ved at gribe fat i tingene og derefter skubbe sig selv af.
"Vi tror på, at vi kan designe en robot, der kan holde på, rulle sig selv op og derefter forlænge sin krop for at nå nye kontaktpunkter ", forklarer Transeth. "I øvrigt, vi tror på, at det kan krybe ind blandt udstyrskomponenter på ISS og bruge udstyrsoverflader til at få trækkraft for at blive ved med at bevæge sig fremad - meget på samme måde som rigtige slanger gør i naturen ", han siger.
"Vi vil finde ud af, hvilke specifikationer et slangerobotsystem kræver", tilføjer han. "For eksempel, hvilken slags sensorer har robotten brug for for at opnå en tilstrækkelig forståelse af sine omgivelser? Hvilke teknologier er tilgængelige for at hjælpe os med at opfylde disse behov, og hvilke nye teknologier skal udvikles? Hvilke usikkerheder er involveret i forhold til, hvad det kan være muligt at opnå? ”Spørger Transeth.
En drone ved navn Astrobee flyver snart rundt og foretager inspektioner på ISS. Forskerne mener, at de kan lære meget af Astrobee, fordi noget af dets teknologi vil ligne den, der kan anvendes i et slangerobotsystem.
Sidste artikelVideo:Udvikling af landingsteknologi til rummet
Næste artikelHjælp astronomer med at jage på jordlignende planeter
 Varme artikler
Varme artikler
-
 Billede:Saturns indersiden-ud-ringeKredit:NASA/JPL-Caltech/Space Science Institute I denne nysgerrige udsigt, Saturn rager i forgrunden til venstre, prydet af skygger kastet af den gigantiske planets ringe. Til højre, ringene dukke
Billede:Saturns indersiden-ud-ringeKredit:NASA/JPL-Caltech/Space Science Institute I denne nysgerrige udsigt, Saturn rager i forgrunden til venstre, prydet af skygger kastet af den gigantiske planets ringe. Til højre, ringene dukke -
 Sætte etikken i planetarisk beskyttelseHar NASAs Curiosity-rover ført sovende mikrober til Mars? Kredit:NASA/JPL–Caltech/MSSS I de kommende årtier, mens vi forbereder os på en mere dybtgående søgen efter liv på Mars, samt besøg på pote
Sætte etikken i planetarisk beskyttelseHar NASAs Curiosity-rover ført sovende mikrober til Mars? Kredit:NASA/JPL–Caltech/MSSS I de kommende årtier, mens vi forbereder os på en mere dybtgående søgen efter liv på Mars, samt besøg på pote -
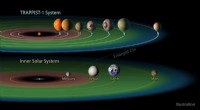 Overraskende mange exoplaneter kunne være vært for livTrappist-1 planetsystemet har tre planeter i sin beboelige zone, mens vores system kun har én. Kredit:NASA/JPL-Caltech Jorden. En ny undersøgelse viser, at andre stjerner kan have så mange som syv
Overraskende mange exoplaneter kunne være vært for livTrappist-1 planetsystemet har tre planeter i sin beboelige zone, mens vores system kun har én. Kredit:NASA/JPL-Caltech Jorden. En ny undersøgelse viser, at andre stjerner kan have så mange som syv -
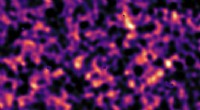 At bringe balance i universet:Ny teori kan forklare, at man mangler 95 procent af kosmosMørkt stofkort over KiDS undersøgelsesregion (region G12). Kredit:KiDS undersøgelse Forskere ved University of Oxford kan have løst et af de største spørgsmål i moderne fysik, med et nyt papir, de
At bringe balance i universet:Ny teori kan forklare, at man mangler 95 procent af kosmosMørkt stofkort over KiDS undersøgelsesregion (region G12). Kredit:KiDS undersøgelse Forskere ved University of Oxford kan have løst et af de største spørgsmål i moderne fysik, med et nyt papir, de
- Super sniffer:Hundens næse inspirerer til nye gassensormaterialer
- Indonesien Sinabung-bjerget skyder en søjle af røg og aske op i himlen
- Knækkende æggeskals nanostruktur:Ny opdagelse kan have vigtige konsekvenser for fødevaresikkerhed…
- Skoler, Lufthavne lukkede, da Indonesiens brande vækker frygt for Singapore F1
- Et stykke SpaceX raketaffald lander på Washington State Farm
- Ultrashort lysimpulser til hurtige lysbølgecomputere