


InSight Mars lander afdækker muldvarpen
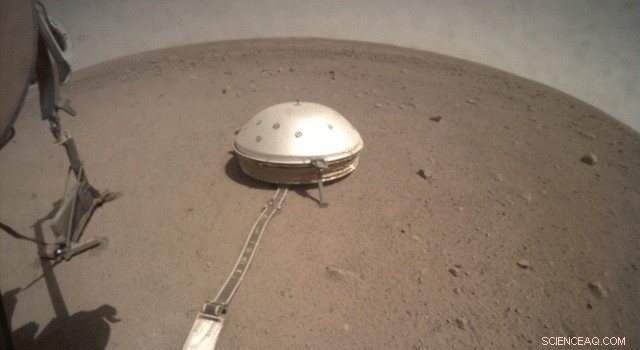
Den 28. juni 2019, NASAs InSight-lander brugte sin robotarm til at flytte støttestrukturen til sit graveinstrument, uformelt kaldet "muldvarpen". Dette billede blev fanget af fiskeøjeinstrumentets kontekstkamera under landerens dæk. Kredit:NASA/JPL-Caltech
Se "muldvarpen":Den varmefølende spids, som NASAs InSight-lander satte ind på Mars-overfladen, er nu synlig. Sidste uge, rumfartøjets robotarm fjernede med succes muldvarpens støttestruktur, som ikke har været i stand til at grave, og placerede den til siden. At få strukturen af vejen giver missionsholdet et overblik over muldvarpen - og måske en måde at hjælpe den med at grave.
"Vi har fuldført det første trin i vores plan for at redde muldvarpen, " sagde Troy Hudson fra en videnskabsmand og ingeniør med InSight-missionen ved NASAs Jet Propulsion Laboratory i Pasadena, Californien. "Vi er ikke færdige endnu. Men i øjeblikket, hele holdet er opstemt, fordi vi er så meget tættere på at få muldvarpen i gang igen."
Del af et instrument kaldet Heat Flow and Physical Properties Package (HP3), den selvhamrende muldvarp er designet til at grave så meget som 16 fod (5 meter) ned og tage Mars' temperatur. Men muldvarpen har ikke været i stand til at grave dybere end omkring 12 tommer (30 centimeter), så den 28. feb. I 2019 beordrede holdet instrumentet til at stoppe med at hamre, så de kunne bestemme en vej frem.
Forskere og ingeniører har udført tests for at redde muldvarpen på JPL, som leder InSight-missionen, samt på German Aerospace Center (DLR), som gav HP3. Baseret på DLR-test, jorden giver muligvis ikke den slags friktion, som muldvarpen er designet til. Uden friktion for at afbalancere rekylen fra den selvhamrende bevægelse, muldvarpen ville simpelthen hoppe på plads i stedet for at grave.
Et tegn på denne uventede jordtype er tydeligt på billeder taget af et kamera på robotarmen:Der er dannet en lille pit omkring muldvarpen, mens den har hamret på plads.
"Billederne, der kommer tilbage fra Mars, bekræfter, hvad vi har set i vores test her på Jorden, " sagde HP3-projektforsker Mattias Grott fra DLR. "Vores beregninger var korrekte:Denne sammenhængende jord komprimeres ind i vægge, mens muldvarpen hamrer."
Holdet ønsker at presse på jorden nær denne pit ved hjælp af en lille scoop på enden af robotarmen. Håbet er, at dette kan kollapse gruben og give den nødvendige friktion for muldvarpen at grave.
Det er også stadig muligt, at muldvarpen har ramt en sten. Mens muldvarpen er designet til at skubbe små sten ud af vejen eller bøje sig omkring dem, større vil forhindre spidsens fremskridt. Det er derfor, missionen omhyggeligt udvalgte et landingssted, der sandsynligvis ville have både færre sten generelt og mindre nær overfladen.
Robotarmens griber er ikke designet til at løfte muldvarpen, når den først er ude af sin støttestruktur, så den vil ikke være i stand til at flytte muldvarpen, hvis en sten blokerer den.
Teamet vil diskutere, hvilke næste skridt der skal tages baseret på omhyggelig analyse. Senere på måneden, efter at have sluppet armens griber fra støttestrukturen, de tager et kamera med til nogle detaljerede billeder af muldvarpen.
 Varme artikler
Varme artikler
-
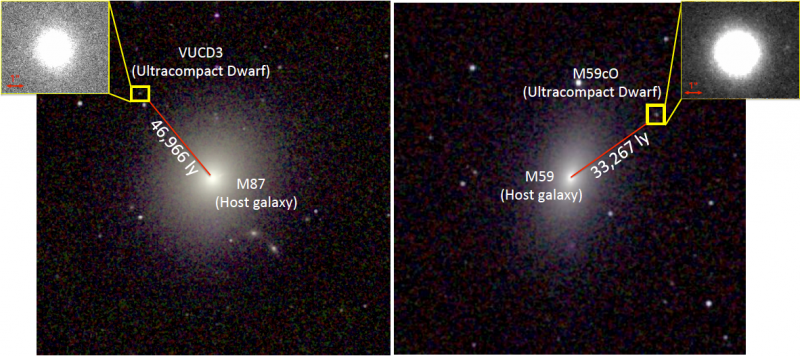 Supermassive sorte huller fundet i to små galakserU-astronomer og kolleger har fundet to ultrakompakte dværggalakser, VUCD3 og M59cO, med supermassive sorte huller. Resultaterne tyder på, at dværgene sandsynligvis er små rester af større galakser, de
Supermassive sorte huller fundet i to små galakserU-astronomer og kolleger har fundet to ultrakompakte dværggalakser, VUCD3 og M59cO, med supermassive sorte huller. Resultaterne tyder på, at dværgene sandsynligvis er små rester af større galakser, de -
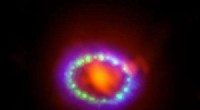 Et nærmere kig på supernovastøv tyder på, at der er mere af det end tidligere antagetDette billede viser resterne af Supernova 1987A set i lyset af meget forskellige bølgelængder. ALMA-data (i rødt) viser nydannet støv i midten af resten. Hubble (i grøn) og Chandra (i blå) data vise
Et nærmere kig på supernovastøv tyder på, at der er mere af det end tidligere antagetDette billede viser resterne af Supernova 1987A set i lyset af meget forskellige bølgelængder. ALMA-data (i rødt) viser nydannet støv i midten af resten. Hubble (i grøn) og Chandra (i blå) data vise -
 Forskere forklarer mysteriet med at banke galaksehobeBillede af en galaksehob, som kan indeholde hundreder eller tusinder af galakser bundet gravitationelt. Kredit:NASA To galaksehobe i færd med at smelte sammen skabte et lag af overraskende varm ga
Forskere forklarer mysteriet med at banke galaksehobeBillede af en galaksehob, som kan indeholde hundreder eller tusinder af galakser bundet gravitationelt. Kredit:NASA To galaksehobe i færd med at smelte sammen skabte et lag af overraskende varm ga -
 HD 87240 er en kemisk ejendommelig stjerne med en overflod af tunge grundstoffer, undersøgelse tyde…HD 87240. Kredit:Digitized Sky Survey. Europæiske astronomer har udført en kemisk undersøgelse af stjernen HD 87240, et medlem af den åbne klynge NGC 3114. Den nye forskning, som bestemte mængdern
HD 87240 er en kemisk ejendommelig stjerne med en overflod af tunge grundstoffer, undersøgelse tyde…HD 87240. Kredit:Digitized Sky Survey. Europæiske astronomer har udført en kemisk undersøgelse af stjernen HD 87240, et medlem af den åbne klynge NGC 3114. Den nye forskning, som bestemte mængdern
- Hvordan nogle batterimaterialer udvider sig uden at revne
- Forskere udvikler metode til at teste seismisk sårbarhed af vandrørledningssystemer
- Synlige strafinstitutioner er nøglen til at fremme samarbejde i stor skala
- Maskinindlæringsteknik rekonstruerer billeder, der passerer gennem en multimode fiber
- Edmunds undersøger 3 semi-autonome køresystemer
- Virkelige livsfunktioner af lineære ligninger