


Et centreret fejl entropi-baseret sigma-punkt Kalman filter til rumfartøjs tilstand estimering med ikke-Gaussisk støj
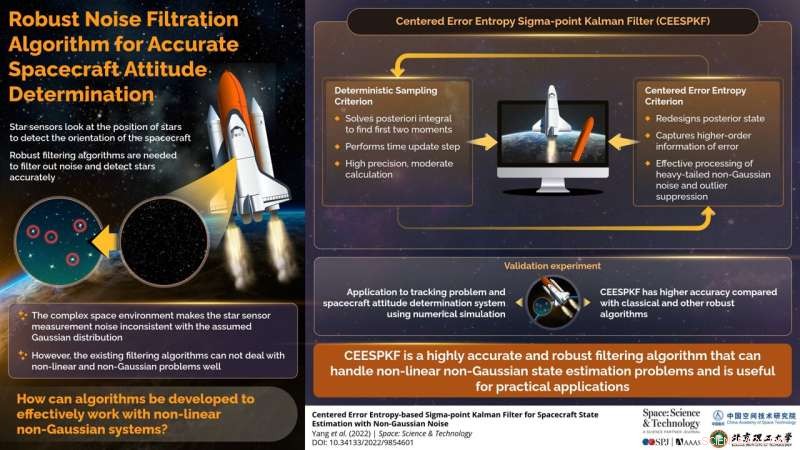
Infografik til centreret fejl entropi-baseret sigma-punkt kalman filter til rumfartøjs tilstand estimering med ikke-gaussisk støj. Kredit:Rum:Videnskab og teknologi
En rumfartøjets holdningskinematisk model, holdningsmålingsmodel og filteralgoritme er tre vigtige dele i rumfartøjets holdningsbestemmelse, og en højpræcisionsfiltreringsalgoritme er nøglen til holdningsbestemmelse. Det klassiske sigma-punkt Kalman-filter (SPKF) er meget udbredt i et rumfartøjstilstandsvurderingsområde med Gaussisk hvid støjhypotese.
Selvom SPKF-algoritmen fungerer godt i ideel Gaussisk hvid støj, er de faktiske driftsbetingelser for rumfartøjet i kredsløb komplicerede. Rummiljøinterferens, solpaneljitter og flimmerstøj vil få støjen til ikke længere at opfylde Gauss-fordelingen og præsentere en tung-halede ikke-Gaussisk situation, hvor den klassiske SPKF-filtreringsmetode ikke længere er anvendelig, og der vil være åbenlys forringelse af nøjagtigheden eller endda filtrerende divergens.
I en forskningsartikel for nylig offentliggjort i Space:Science &Technology , et fælles team fra Army Engineering University of PLA og Chinese Academy of Military Science, foreslog en robust Centered Error Entropy Unscented Kalman Filter (CEEUKF) algoritme ved at kombinere det deterministiske prøveudtagningskriterium med det centrerede fejlentropikriterium.
Først og fremmest introducerede forfatteren den klassiske SPKF-algoritme og CEE-kriteriet. Kalman-filteret (KF) er det optimale filter med den lineære Gauss-ramme. Men faktiske systemer er ofte ikke-lineære systemer, og der er ingen optimal filtreringsalgoritme for ikke-lineære systemer. Kun omtrentlige metoder kan bruges til de ikke-lineære Gauss-systemer.
Den ikke-lineære filtreringsalgoritme baseret på deterministisk prøveudtagningskriterium har højere præcision end lineariseringen af ikke-lineær funktion. De klassiske deterministiske sampling ikke-lineære Gaussiske filtreringsmetoder er uparfumeret Kalman filter (UKF), kubature Kalman filter (CKF) og centralt differential Kalman filter (CDKF). Da disse metoder involverer prøveudtagning af deterministiske punkter, kaldte forfatteren dem SPKF-metoder.
Endvidere blev den typiske UT-metode anvendt, og UKF gennemgås. Klassisk UKF brugte UT-metoden til at få prøveudtagningspunkter og tilnærme tilstandsmiddelværdien og fejlkovariansen for en sandsynlighedstæthedsfunktion (PDF). UKF-metoden var lettere at tilnærme PDF end en ikke-lineær funktion. Tidsopdateringstrin og måleopdateringstrin var indeholdt i den.
Dernæst tog forfatteren den vægtede kombination af den maksimale korrentropi (MC) og den minimale fejlentropi (MEE) som udtryk for CEE, som var blevet verificeret til at være mere robust end MEE- og MC-kriterierne.
Derefter udledte forfatteren den centrerede fejlentropibaserede UKF (CEEUKF) ved CEE-kriteriet og var forpligtet til at udvide denne algoritme til ikke-lineære og ikke-Gaussiske felter. CEEUKF indeholdt tids- og måleopdateringstrin. For det ikke-lineære system var tidsopdateringen af CEEUKF-algoritmen den samme som den klassiske UKF-algoritme, hvor sigma-punkt-samplingsmetoderne blev brugt til at udføre tidsopdateringstrin.
Det nye måleopdateringstrin blev designet baseret på to hovedværker. Den ene er etableringen af den udvidede model, og den anden er posterior tilstandsestimering ved CEE-kriteriet. Fordi den højere ordens information om fejlen blev fanget af CEE-kriteriet, burde CEESPKF'er være mere robuste til at håndtere ikke-Gaussisk støj end CEEKF.
Bagefter bekræftede ansøgningen til rumfartøjets holdningsbestemmelses-system forfatterens teori. Forfatteren introducerede først gyromodellen, holdningsbestemmelsessystemmodellen og målemodellen. Derefter blev klassisk UKF, maksimal korrentropi uparfumeret Kalman-filter (MCUKF) og minimal fejlentropi uparfumeret Kalman-filter (MEEUKF) og det foreslåede CEEUKF brugt til at udføre simulering.
I Gaussisk støj var filtreringsnøjagtigheden af CEEUKF og MCUKF tæt på den for den klassiske UKF-metode. Filtreringsnøjagtigheden af MEEUKF var dårlig på grund af dens ustabilitet. I ikke-Gaussisk støj havde den foreslåede CEEUKF-algoritme den højeste filtreringsnøjagtighed end den klassiske UKF og andre robuste algoritmer.
Desuden havde CEEUKF også den hurtigste konvergensrate. Filtreringsresultaterne for traditionel UKF havde den laveste filtreringsnøjagtighed, og nogle store estimerede fejl opstod på forskellige tidspunkter. MCUKF havde bedre filtreringseffekt end den traditionelle UKF, men den var dårligere end den foreslåede CEEUKF. Som konklusion, sammenlignet med de eksisterende algoritmer, viste CEEUKF sin fremragende ydeevne under det korrekte valg af kernebåndbredder i simuleringen af rumfartøjets holdningestimeringssystem. + Udforsk yderligere
Et nyt Kalman-filter til målsporing i rummet
 Varme artikler
Varme artikler
-
 Galakser vokser sig større og hæver, efterhånden som de bliver ældre:undersøgDette er et langeksponeret billede fra NASAs Hubble-rumteleskop af den massive galaksehob Abell 2744. Det viser nogle af de svageste og yngste galakser, der er fundet i rummet. Kredit:NASA/ESA/STScI
Galakser vokser sig større og hæver, efterhånden som de bliver ældre:undersøgDette er et langeksponeret billede fra NASAs Hubble-rumteleskop af den massive galaksehob Abell 2744. Det viser nogle af de svageste og yngste galakser, der er fundet i rummet. Kredit:NASA/ESA/STScI -
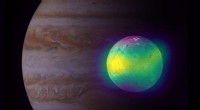 ALMA viser vulkansk indvirkning på Ios atmosfæreSammensat billede, der viser Jupiters måne Io i radio (ALMA), og optisk lys (Voyager 1 og Galileo). ALMA-billederne af Io viser for første gang, at svovldioxid-faner (i gult) stiger op fra vulkanerne.
ALMA viser vulkansk indvirkning på Ios atmosfæreSammensat billede, der viser Jupiters måne Io i radio (ALMA), og optisk lys (Voyager 1 og Galileo). ALMA-billederne af Io viser for første gang, at svovldioxid-faner (i gult) stiger op fra vulkanerne. -
 Hvor lang tid har den engang dimmende stjerne Betelgeuse tilbage?I det første panel, set i ultraviolet lys med Hubble -rumteleskopet, en lys, varm klat plasma udstødes fra fremkomsten af en enorm konvektionscelle på stjernens overflade. I panel 2, den udstrømmend
Hvor lang tid har den engang dimmende stjerne Betelgeuse tilbage?I det første panel, set i ultraviolet lys med Hubble -rumteleskopet, en lys, varm klat plasma udstødes fra fremkomsten af en enorm konvektionscelle på stjernens overflade. I panel 2, den udstrømmend -
 Velegnet til MarsExoFiT rover i Chile. Kredit:Airbus Rovers er alsidige opdagelsesrejsende på overfladen af andre planeter, men de har brug for noget træning, før de tager afsted. En model af Rosalind Franklin r
Velegnet til MarsExoFiT rover i Chile. Kredit:Airbus Rovers er alsidige opdagelsesrejsende på overfladen af andre planeter, men de har brug for noget træning, før de tager afsted. En model af Rosalind Franklin r
- Vulkanen i Papua Ny Guinea går i udbrud og sender indbyggere på flugt
- NASA finder potentiale for kraftig regn i den nye tropiske cyklon Irondro
- Leder af nonprofitorganisationer for fødevaresikkerhed står i spidsen for World Food Prize
- Gammelt DNA hjælper videnskabsmænd med at studere menneskets evolution:Det er som en tidskapsel
- Forskere finder det første fugl næb, lige under deres næse
- Lærere er afgørende for at opdage og rapportere mishandling af børn