


Første dynamiske rygsøjle - robotisk rygsøjleeksoskelet - karakteriserer rygsøjledeformiteter
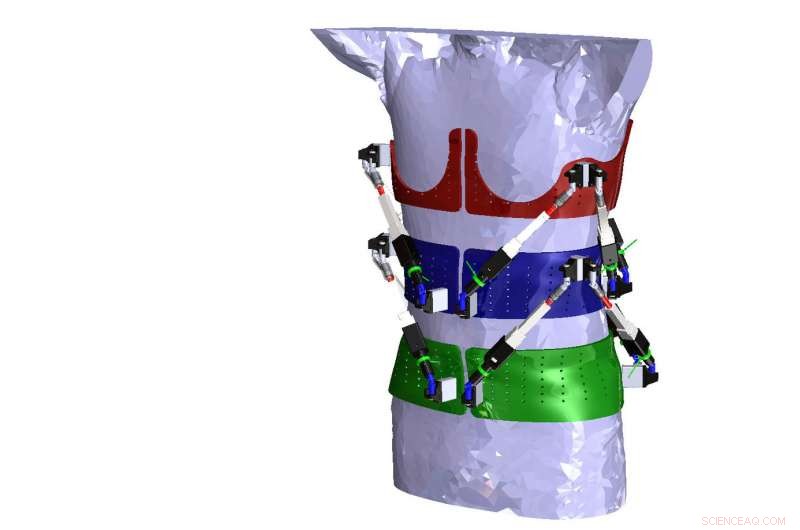
Robotic Spine Exoskeleton består af to seks-frihedsgrader parallelt aktiverede moduler forbundet i serie, hver med seks aktiverede lemmer. Hvert modul styrer oversættelser/rotationer eller kræfter/øjeblikke af en ring i tre dimensioner i forhold til den tilstødende ring. Kredit:Sunil Agrawal/Columbia Engineering
Rygsøjledeformiteter, såsom idiopatisk skoliose og kyfose (også kendt som "pukkelrygg"), er karakteriseret ved en unormal krumning i rygsøjlen. Børn med disse spinale deformiteter rådes typisk til at bære en bøjle, der passer rundt om torso og hofter for at rette op på den unormale kurve. Afstivning har vist sig at forhindre progression af den unormale kurve og undgå operation. Den underliggende teknologi til afstivning har ikke ændret sig fundamentalt i de sidste 50 år.
Mens afstivning kan stoppe/forsinke progressionen af unormale rygradskurver hos unge, nuværende seler pålægger en række begrænsninger på grund af deres stive, statisk, og sensorløse designs. Ud over, brugere finder dem ubehagelige at have på og kan lide af hudnedbrydning forårsaget af langvarig, overdreven kraft. I øvrigt, manglende evne til at kontrollere korrektionen fra bøjlen gør det vanskeligt for brugerne at tilpasse sig ændringer i torsoen i løbet af behandlingen, resulterer i nedsat effektivitet.
For at afhjælpe disse mangler, Columbia Engineering -forskere har opfundet et nyt Robotic Spine Exoskeleton (RoSE), der kan løse de fleste af disse begrænsninger og føre til nye behandlinger for deformiteter i rygsøjlen. RoSE er en dynamisk rygsøjle, der gjorde det muligt for holdet at udføre den første undersøgelse, der ser på in vivo målinger af torsoens stivhed og karakteriserer den tredimensionelle stivhed af den menneskelige torso. Undersøgelsen blev offentliggjort online 30. marts i IEEE-transaktioner af neurale systemer og rehabiliteringsteknik .
"Så vidt vi ved, der er ingen andre undersøgelser af dynamiske seler som vores. Tidligere undersøgelser brugte kadavere, som per definition ikke giver et dynamisk billede, " siger undersøgelsens hovedforsker Sunil Agrawal, professor i maskinteknik ved Columbia Engineering og professor i rehabilitering og regenerativ medicin ved Columbia University Vagelos College of Physicians and Surgeons. "RoSE er den første enhed til at måle og modulere positionen eller kræfterne i alle seks frihedsgrader i specifikke områder af torsoen. Denne undersøgelse er grundlæggende, og vi mener, at den vil føre til spændende fremskridt både inden for karakterisering og behandling af rygsøjledeformiteter. "
Udviklet i Agrawal's Robotics and Rehabilitation (ROAR) Laboratory, RoSE består af tre ringe placeret på bækkenet, midten af thorax, og øvre thorax regioner af rygsøjlen. Bevægelsen af to tilstødende ringe styres af en seks-frihedsgrad parallelaktiveret robot. Samlet set, systemet har 12 frihedsgrader styret af 12 motorer. RoSE kan kontrollere bevægelsen af de øvre ringe i forhold til bækkenringen eller påføre kontrollerede kræfter på disse ringe under bevægelsen. Systemet kan også anvende korrigerende kræfter i bestemte retninger, mens det stadig tillader fri bevægelse i andre retninger.
Otte raske mandlige forsøgspersoner og to mandlige forsøgspersoner med rygsøjledeformiteter deltog i pilotundersøgelsen, som var designet til at karakterisere deres torsos tredimensionelle stivhed. Forskerne brugte RoSE, at kontrollere positionen/orienteringen af specifikke tværsnit af forsøgspersonernes torsoer og samtidig måle de udøvede kræfter/momenter.
Resultaterne viste, at den tredimensionelle stivhed af den menneskelige torso kan karakteriseres ved hjælp af RoSE, og at rygsøjlens deformiteter inducerer torso-stivhedskarakteristika, der er signifikant forskellige fra de raske forsøgspersoner. Spinale abnorme kurver er tredimensionelle; derfor er stivhedsegenskaberne kurvespecifikke og afhænger af placeringen af kurvespidsen på den menneskelige torso.
"Vores resultater åbner mulighed for at designe rygsøjler, der inkorporerer patientspecifikke torso-stivhedsegenskaber, " siger undersøgelsens co-principal investigator David P. Roye, en rygsøjlekirurg og en professor i pædiatrisk ortopædi ved Columbia University Irving Medical Center. "Vores resultater kan også føre til nye indgreb ved hjælp af dynamisk modulering af tredimensionelle kræfter til behandling af rygsøjlens deformitet."
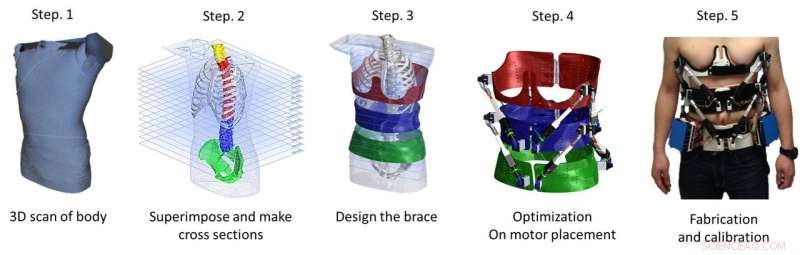
Illustration af design- og fremstillingsprocessen, der bruges til at udvikle Robotic Spine Exoskeleton. Kredit:Sunil Agrawal/Columbia Engineering
"Vi byggede på de principper, der bruges i konventionelle rygsøjler, dvs. at tilvejebringe trepunktsbelastning ved kurvens spids ved hjælp af de tre ringe til at sidde tæt på den menneskelige torso, " siger hovedforfatteren Joon-Hyuk Park, der arbejdede på denne forskning som ph.d.-studerende og et teammedlem på Agrawals ROAR-laboratorium. "For at karakterisere den tredimensionelle stivhed af den menneskelige torso, RoSE anvender seks ensrettede forskydninger i hver DOF af den menneskelige torso, på to forskellige niveauer, mens man samtidig måler kræfterne og momenterne."
Mens denne første undersøgelse brugte en mandlig bøjle designet til voksne, Agrawal og hans team har allerede designet en bøjle til piger, da idiopatisk skoliose er 10 gange mere almindelig hos teenagepiger end hos drenge. Holdet rekrutterer aktivt piger med skoliose for at karakterisere, hvordan torso-stivhed varierer på grund af en sådan medicinsk tilstand.
"Retningsforskel i rygsøjlens stivhed kan hjælpe med at forudsige, hvilke børn der potentielt kan have gavn af afstivning og undgå kirurgi, " siger Agrawal.
 Varme artikler
Varme artikler
-
 Californiens forbrugerbeskyttelseslovgivning kan påvirke virksomheder i hele USA.Dette udaterede billede leveret af APRA AMCOS viser Josh Simons. Hvis de tusindvis af californiere, der bruger Simons app til musikere, kræver i næste måned, at Vampr sletter deres personlige oplysnin
Californiens forbrugerbeskyttelseslovgivning kan påvirke virksomheder i hele USA.Dette udaterede billede leveret af APRA AMCOS viser Josh Simons. Hvis de tusindvis af californiere, der bruger Simons app til musikere, kræver i næste måned, at Vampr sletter deres personlige oplysnin -
 Webpioner ønsker ny kontrakt for internetWebpioner Berners-Lee sagde, at alle mulige ting er gået galt med internettet Opfinderen af det verdensomspændende web, Tim Berners-Lee, annoncerede mandag planer om en kontrakt for at sikre, at
Webpioner ønsker ny kontrakt for internetWebpioner Berners-Lee sagde, at alle mulige ting er gået galt med internettet Opfinderen af det verdensomspændende web, Tim Berners-Lee, annoncerede mandag planer om en kontrakt for at sikre, at -
 Du kan nyde en mulighed for kontrol af personlige data, hvis Project Bali blomstrerKredit:CC0 Public Domain Vintersjæle blandt verdens computerbrugere fortryder, med jeg opgiver opsigelse over manglende ejerskab til ens personlige data. Nu vækker nyheder om et Microsoft-projekt
Du kan nyde en mulighed for kontrol af personlige data, hvis Project Bali blomstrerKredit:CC0 Public Domain Vintersjæle blandt verdens computerbrugere fortryder, med jeg opgiver opsigelse over manglende ejerskab til ens personlige data. Nu vækker nyheder om et Microsoft-projekt -
 Bevægelsesplanlægning til automatiseret kørsel under usikkerhed og med begrænset udsynEt eksemplarisk skæringsscenarie, der fremhæver en brugssag af den foreslåede tilgang. Ego-køretøjet, afbildet i blåt i hele dette blad, fortsætter til et kryds, hvor det må give efter. Køretøjet har
Bevægelsesplanlægning til automatiseret kørsel under usikkerhed og med begrænset udsynEt eksemplarisk skæringsscenarie, der fremhæver en brugssag af den foreslåede tilgang. Ego-køretøjet, afbildet i blåt i hele dette blad, fortsætter til et kryds, hvor det må give efter. Køretøjet har