


Bevægelsesplanlægning til automatiseret kørsel under usikkerhed og med begrænset udsyn
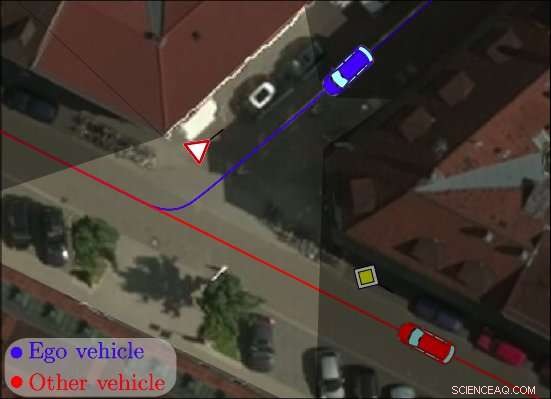
Et eksemplarisk skæringsscenarie, der fremhæver en brugssag af den foreslåede tilgang. Ego-køretøjet, afbildet i blåt i hele dette blad, fortsætter til et kryds, hvor det må give efter. Køretøjet har begrænset sigtbarhed, og et krydsende køretøj nærmer sig fra det tilstoppede område. Planlæggeren af køretøjet skal overveje, at der kan være et køretøj, der nærmer sig og reducere dets hastighed tilstrækkeligt. Kredit:Tas &Stiller.
Forskere ved FZI Research Center for Information Technology har udviklet en ny metode, der kan forbedre bevægelsesplanlægningen af autonome køretøjer i usikre miljøer eller under forhold med begrænset sigtbarhed. Deres papir, forudgivet på arXiv, skitserer en teknik til at undgå kollisioner i den værst tænkelige udvikling af et givet scenarie.
"Automatisk kørsel i bymiljøer og under barske forhold er både udfordrende og forbliver på toppen af forskningen, " skrev forskerne i deres papir. "Ugunstige vejr- og lysforhold resulterer i dårlig kvalitet i opfattelsen ved at indføre højere usikkerheder og begrænsede modtagelige felter."
Udfordringerne beskrevet af forskerne er måske endnu større i bymiljøer, hvor uventede hændelser gør det sværere at forudsige udfaldet af en situation. For at løse disse vanskeligheder, tidligere undersøgelser har forsøgt at udvikle banebrydende perceptionssystemer til automatiserede køretøjer.
Ikke desto mindre, selv de mest avancerede af disse systemer, udstyret med state-of-the-art sensorer og teknologi, ofte kæmper med at håndtere usikkerhed, dermed blot reducere risikoen for kollisioner. For at løse dette problem, forskerne ved FZI fokuserede på bevægelsesplanlægning i et usikkert miljø med okklusioner.
"I dette papir analyserede vi usikkerheder, som et automatiseret køretøj er underlagt, " forklarede forskerne. "Vi studerede forskellige udfordrende trafiksituationer for et køretøj med et begrænset modtageligt felt."
Efter at have studeret de forhold, hvorunder en bevægelsesplanlægger skal overveje køretøjer, der nærmer sig fra områder, der ikke er synlige, forskerne udtænkte en tilgang til hurtigt at opdage uoverensstemmende adfærd. Deres tilgang efterligner noget den måde, hvorpå menneskelige bilister typisk nærmer sig vejkryds, kørsel med mere forsigtighed og reduceret hastighed.
"Vi præsenterer en metode til at forblive kollisionsfri for den værst tænkelige udvikling af den givne scene, " skrev forskerne. "Vi definerer kriterier, der måler de tilgængelige marginer til en kollision, mens vi overvejer synlighed og interaktioner og integrerer følgelig forhold, der anvender disse kriterier i en optimeringsbaseret bevægelsesplanlægger."
Forskerne evaluerede deres metode i et simuleringsmiljø med lukket sløjfe og fandt ud af, at den generaliserede godt på tværs af flere forskellige byscenarier. Deres tilgang er nu blevet integreret i et automatiseret køretøj, kaldet BERTHAONE.
"Vores fremtidige arbejde vil beskæftige sig med mere komplekse scenarier, hvor et væld af ruter og manøvremuligheder såsom vognbaneskift er tilgængelige, " skrev forskerne.
© 2018 Science X Network
 Varme artikler
Varme artikler
-
 Huawei lancerer første produkt med eget styresystemGeorge Zhao, Præsident for HONOR, en filial af Huawei, afsløret HONOR Vision Series, verdens første smartskærm udstyret med HarmonyOS under Huaweis udviklerkonference Den kinesiske telegigant Huaw
Huawei lancerer første produkt med eget styresystemGeorge Zhao, Præsident for HONOR, en filial af Huawei, afsløret HONOR Vision Series, verdens første smartskærm udstyret med HarmonyOS under Huaweis udviklerkonference Den kinesiske telegigant Huaw -
 Ubisoft spiller ind i streaming-tendensen ved E3-videospilbegivenhedenUbisoft-teamet poserer på scenen efter Ubisoft E3 2019-konferencen i Orpheum Theatre den 10. juni, 2019 i Los Angeles, Californien Den franske videospil-titan Ubisoft afslørede mandag en ny abonne
Ubisoft spiller ind i streaming-tendensen ved E3-videospilbegivenhedenUbisoft-teamet poserer på scenen efter Ubisoft E3 2019-konferencen i Orpheum Theatre den 10. juni, 2019 i Los Angeles, Californien Den franske videospil-titan Ubisoft afslørede mandag en ny abonne -
 Huawei-medarbejdere går sammen med kinesisk militær om forskningHuawei er gået langt for at afvise ethvert tæt forhold til den kinesiske regering eller militær Huawei-ansatte er gået sammen med kinesiske militærforskere for at udføre forskning, et samarbejde,
Huawei-medarbejdere går sammen med kinesisk militær om forskningHuawei er gået langt for at afvise ethvert tæt forhold til den kinesiske regering eller militær Huawei-ansatte er gået sammen med kinesiske militærforskere for at udføre forskning, et samarbejde, -
 Fordele og ulemper ved hybridbilerHybridbiler er blevet det mest populære alternative køretøjsdesign rundt, og er helt sikkert den mest anvendelige nuværende teknologi. Ligesom alt andet har de deres upside og deres downside, men da h
Fordele og ulemper ved hybridbilerHybridbiler er blevet det mest populære alternative køretøjsdesign rundt, og er helt sikkert den mest anvendelige nuværende teknologi. Ligesom alt andet har de deres upside og deres downside, men da h
- Ny platform fungerer som en gatekeeper for at sikre, at webtjenester overholder brugernes brugerdefi…
- Ny forskningsramme foreslår en retfærdig tilgang til forebyggelse af våbenvold
- Ny oviraptorosaur-art opdaget i Mongoliet
- WeWork-grundlægger Neumann:En utraditionel leder træder til side
- Sådan læses en Sling Psychrometer
- Klimaændringer forværrer global sult:FN