


AI-udstyrede robotter udvikler situationsbevidsthed i Jordens mest usikre miljø

En A.I.-udstyret robot, der er i stand til at opnå situationsfornemmelse under vandet. Den sorte enhed med den tynde blå strimmel er robottens multistråle-ekkolod, som den bruger til at "se" i det komplekse miljø. Kredit:Stevens Institute of Technology
Bølger, vinde, strømme, vågner fra passerende både og hvirvler, der hvirvler rundt i strukturer, gør vand til et af de mest komplekse miljøer for erfarne bådkaptajner, endsige robotter. Nu, forskere ved Stevens Institute of Technology udvikler algoritmer, der lærer robotter at tilpasse sig havets konstant skiftende dynamik for at imødekomme en af vores nations største bekymringer:at beskytte og bevare vores aldrende vand-rodede infrastruktur, såsom moler, rørledninger, broer og dæmninger.
Arbejdet, ledet af Brendan Englot, en professor i maskinteknik ved Stevens, kæmper med det igangværende spørgsmål om hyppigheden, hvormed disse undervandsstrukturer kontrolleres. Der er langt flere undervandsstrukturer, end der er dykkere til at inspicere dem med den ønskede hyppighed. Sommetider, de skal dykke ned under overfladen til ekstreme og farlige dybder, kræver flere uger at komme sig. Englot træner robotter til at påtage sig sådanne opgaver – men det er ikke let.
"Der er så mange vanskelige forstyrrelser, der skubber robotten rundt, og der er ofte meget dårlig sigtbarhed, gør det svært at give et køretøj under vandet den samme situationsfornemmelse, som en person ville have gået rundt på jorden eller været oppe i luften, ”siger Englot.
Englot er klar til udfordringen.
Hans forskergruppe anvender en type kunstig intelligens kendt som forstærkningslæring, som bruger algoritmer, der ikke er baseret på en eksakt matematisk model; snarere lærer de målorienterede algoritmer robotter, hvordan man udfører et komplekst mål ved at udføre handlinger og observere resultaterne. Mens robotten indsamler data, den opdaterer sin "politik" for at finde ud af optimale måder at manøvrere og navigere under vandet på.

Brendan Englot på en Manhattan-mole med en A.I.-udstyret robot, der er i stand til at opnå situationsbevidsthed under vandet ved hjælp af multi-beam sonar. Kredit:Stevens Institute of Technology
De data, de indsamler, er sonar, det mest pålidelige værktøj til at navigere under vand. Som en delfin, der bruger ekkolokalisering, Englots robotter udsender højfrekvente chirp og måler, hvor lang tid det tager lyden at vende tilbage efter at have hoppet af omkringliggende strukturer – indsamler data og opnår situationsbevidsthed, mens de bliver slået rundt af et vilkårligt antal kræfter.
Englot sendte for nylig en robot på en autonom mission for at kortlægge en Manhattan -mole. "Vi havde ikke en tidligere model af den mole, " siger Englot. "Vi var i stand til bare at sende vores robot ned, og den var i stand til at vende tilbage og med succes lokalisere sig selv gennem hele missionen." Vejledt af algoritmer skabt i Englot-laboratoriet, robotten bevægede sig uafhængigt, indsamling af information for at producere et 3-D kort, der viser placeringen af molens pæle.
Disse første skridt er opmuntrende, men Englot arbejder på at udvide sine robotters muligheder. Englot forudser rutinemæssige inspektioner af robotter på alt fra skibsskrog til off-shore olieplatforme. Ud over, robotter kan kortlægge jordens enorme, undervands terræn.
Imidlertid, at nå disse mål betyder at tage fat på sonarens begrænsninger. "Forestil dig at gå gennem en bygning og navigere i gangene med den samme gråskala, kornet visuel opløsning som medicinsk ultralyd, siger Englot.
Når en struktur er blevet kortlagt, kunne en autonom robot planlægge et andet pass, en højere opløsningsinspektion af kritiske områder ved hjælp af et kamera. Englot forestiller sig yderligere ålelignende robotter, der kan væve gennem sprækker og smalle rum, måske endda hjælpe med redninger. "For virkelig at drage fordel af den slags designs først skal vi være i stand til at navigere med tillid, "siger han. Englot fortsætter med at finjustere sine algoritmer for at give den tillid.
Englot fremmer også undervandsteknologi ud over de nuværende patchwork-kort, der er kedsommeligt skabt af joystick-kontrollerede robotter, som en rover på en fjern planet. "Nogle af de hårdeste udfordringer inden for robotautonomi er under vandet, " siger han. Der er lang vej igen, men at overvinde udfordringer trak Englot til robotteknologi i første omgang.
 Varme artikler
Varme artikler
-
 Facebook følger Google med midler til at støtte journalistikFacebook følger Googles føring med en plan om at investere $300 millioner for at støtte lokal journalistik, på baggrund af bekymringer om, at onlineplatforme har skadet nyhedsorganisationer ved at dom
Facebook følger Google med midler til at støtte journalistikFacebook følger Googles føring med en plan om at investere $300 millioner for at støtte lokal journalistik, på baggrund af bekymringer om, at onlineplatforme har skadet nyhedsorganisationer ved at dom -
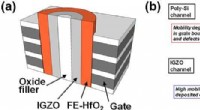 En enhed opstår fra fusionen af IGZO og ferroelektrisk-HfO2(a) Skematisk af ferroelektrisk-HfO2-baseret FeFET med 3D vertikal stackstruktur for høj hukommelseskapacitet. Poly-silicium bruges typisk som et kanalmateriale. I dette arbejde, vi foreslår at bruge
En enhed opstår fra fusionen af IGZO og ferroelektrisk-HfO2(a) Skematisk af ferroelektrisk-HfO2-baseret FeFET med 3D vertikal stackstruktur for høj hukommelseskapacitet. Poly-silicium bruges typisk som et kanalmateriale. I dette arbejde, vi foreslår at bruge -
 Uber hopper ind i elektriske scootere i EuropaUber har bevæget sig ind på markedet for leje af elektriske sparkescootere i Europa med Jump-datterselskabets lanceringstjeneste i Madrid Den globale ride-hiing-gigant Uber lancerede tirsdag i Mad
Uber hopper ind i elektriske scootere i EuropaUber har bevæget sig ind på markedet for leje af elektriske sparkescootere i Europa med Jump-datterselskabets lanceringstjeneste i Madrid Den globale ride-hiing-gigant Uber lancerede tirsdag i Mad -
 Hollandsk fond lancerer Dieselgate-aktion mod VW i FrankrigFriske skyer samler sig for VW En hollandsk fond sagde torsdag, at den havde lanceret en fælles aktion i Frankrig mod bilproducenten Volkswagen som en del af et europæisk tilbud om erstatning til
Hollandsk fond lancerer Dieselgate-aktion mod VW i FrankrigFriske skyer samler sig for VW En hollandsk fond sagde torsdag, at den havde lanceret en fælles aktion i Frankrig mod bilproducenten Volkswagen som en del af et europæisk tilbud om erstatning til
- Er pladetektonikken nøglen til livet? Måske ikke, siger videnskabsmænd
- Første af sin art hydrogel-platform muliggør on-demand produktion af medicin, kemikalier
- X markerer stedet:NASA vælger sted til prøveindsamling af asteroide
- Sådan stopper du voldtægt i Nairobi:Banebrydende arbejde af en gruppe Stanford-statistikere
- Forskere finder kroppens største cellereceptor
- Nyt biologisk stillads tilbyder et lovende grundlag for konstrueret væv