


Blød, multifunktionelle robotter bliver virkelig små
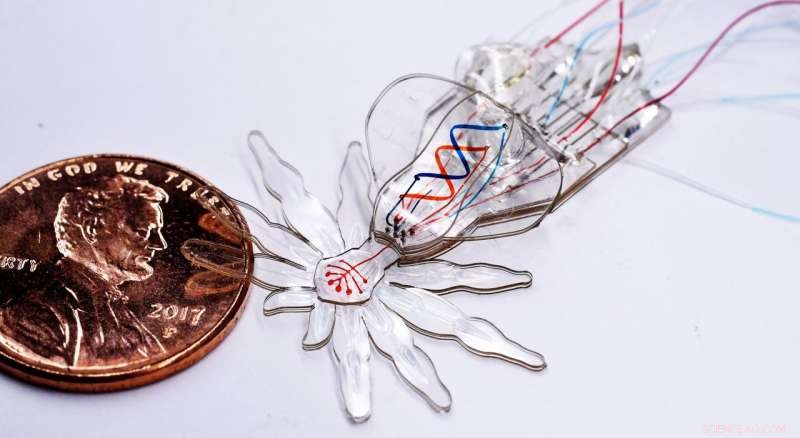
En ny fremstillingsproces gør det muligt at skabe bløde robotter på millimeterskalaen med funktioner på mikrometerskalaen som vist her med eksemplet med en lille blød robotpåfugledderkop med bevægelige kropsdele og farvede øjne og mave. Kredit:Wyss Institute ved Harvard University
Robotikere forestiller sig en fremtid, hvor bløde, dyreinspirerede robotter kan sikkert installeres i svært tilgængelige miljøer, såsom inde i den menneskelige krop eller i rum, der er for farlige til, at mennesker kan arbejde, hvor stive robotter i øjeblikket ikke kan bruges. Bløde robotter i centimeterstørrelse er blevet skabt, men hidtil har det ikke været muligt at fremstille multifunktionelle fleksible robotter, der kan bevæge sig og operere i mindre størrelsesskalaer.
Et team af forskere ved Harvard's Wyss Institute for Biologically Inspired Engineering, Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS), og Boston University har nu overvundet denne udfordring ved at udvikle en integreret fremstillingsproces, der muliggør design af bløde robotter på millimeterskalaen med mikrometerskalafunktioner. For at demonstrere mulighederne i deres nye teknologi, de skabte en blød robotedderkop – inspireret af den millimeterstore farverige australske påfugledderkop – af et enkelt elastisk materiale med kropsformning, bevægelse, og farvefunktioner. Undersøgelsen er publiceret i Avancerede materialer .
"De mindste bløde robotsystemer har stadig en tendens til at være meget enkle, med normalt kun én grad af frihed, hvilket betyder, at de kun kan aktivere én bestemt ændring i form eller type bevægelse, " sagde Sheila Russo, Ph.D., medforfatter til undersøgelsen. Russo var med til at igangsætte projektet som postdoktor i Robert Woods gruppe ved Wyss Institute og SEAS og er nu assisterende professor ved Boston University. "Ved at udvikle en ny hybridteknologi, der kombinerer tre forskellige fremstillingsteknikker, vi skabte en blød robotedderkop kun lavet af silikonegummi med 18 frihedsgrader, omfatter ændringer i strukturen, bevægelse, og farve, og med små funktioner i mikrometerområdet."
Træ, Ph.D., er et Core Faculty-medlem og medleder af Bioinspired Soft Robotics-platformen på Wyss Institute og Charles River Professor of Engineering and Applied Sciences ved SEAS. "I riget af bløde robotenheder, denne nye fremstillingstilgang kan bane vejen for at opnå lignende niveauer af kompleksitet og funktionalitet i denne lille skala som dem, der udvises af deres stive modstykker. I fremtiden, det kan også hjælpe os med at efterligne og forstå struktur-funktionsforhold i små dyr meget bedre end stive robotter kan, " han sagde.
I deres Microfluidic Origami for Reconfigurable Pneumatic/Hydraulic (MORPH) enheder, holdet brugte først en blød litografiteknik til at generere 12 lag af en elastisk silikone, der tilsammen udgør den bløde edderkops materialegrundlag. Hvert lag er præcist skåret ud af en form med en laser-mikrobearbejdningsteknik, og derefter bundet til den nedenfor for at skabe den ru 3D-struktur af den bløde edderkop.
Nøglen til at transformere denne mellemstruktur til det endelige design er et forudtænkt netværk af hule mikrofluidkanaler, der er integreret i individuelle lag. Med en tredje teknik kendt som injektionsinduceret selvfoldning, tryksatte et sæt af disse integrerede mikrofluidkanaler med en hærdelig harpiks udefra. Dette inducerer individuelle lag, og med dem også deres nabolag, til lokalt at bøje sig ind i deres endelige konfiguration, som er fikseret i rummet, når harpiksen hærder. Denne måde, for eksempel, den bløde edderkops hævede mave og nedadbøjede ben bliver permanente træk.
"Vi kan præcist styre denne origami-lignende foldeproces ved at variere tykkelsen og den relative konsistens af silikonematerialet, der støder op til kanalerne på tværs af forskellige lag eller ved at laserskære i forskellige afstande fra kanalerne. Under tryk, kanalerne fungerer derefter som aktuatorer, der inducerer en permanent strukturel ændring, " sagde den første og tilsvarende forfatter Tommaso Ranzani, Ph.D., som startede studiet som postdoc i Woods gruppe og nu også er adjunkt ved Boston University.
Det resterende sæt af integrerede mikrofluidiske kanaler blev brugt som yderligere aktuatorer til at farve øjnene og simulere de abdominale farvemønstre for påfugleedderkoppearterne ved strømmende farvede væsker; og at fremkalde gang-lignende bevægelser i benstrukturerne. "Dette første MORPH-system blev fremstillet i en enkelt, monolitisk proces, der kan udføres på få dage og let gentages i designoptimeringsbestræbelser, " sagde Ranzani.
"MORPH-tilgangen kunne åbne feltet for blød robotteknologi for forskere, der er mere fokuserede på medicinske applikationer, hvor de mindre størrelser og fleksibiliteten af disse robotter kunne muliggøre en helt ny tilgang til endoskopi og mikrokirurgi, " sagde Wyss Institutes stiftende direktør Donald Ingber, M.D., Ph.D.
 Varme artikler
Varme artikler
-
 Kan du life-hack din måde at elske på?Ægte kærlighed kan gemme sig inde i dynger af data. Kredit:xtock/Shutterstock.com Der har aldrig været mangel på datingråd fra familie, venner og selvhjælpsforfattere. Men i den digitale tidsalder
Kan du life-hack din måde at elske på?Ægte kærlighed kan gemme sig inde i dynger af data. Kredit:xtock/Shutterstock.com Der har aldrig været mangel på datingråd fra familie, venner og selvhjælpsforfattere. Men i den digitale tidsalder -
 New Zealand planlægger ny skat for giganter som Google, FacebookDenne 19. juli, 2016, filfoto viser Google -logoet på virksomhedens hovedsæde i Mountain View, Californien. New Zealands regering offentliggjorde planer mandag, 18. februar kl. 2019, for en ny skat re
New Zealand planlægger ny skat for giganter som Google, FacebookDenne 19. juli, 2016, filfoto viser Google -logoet på virksomhedens hovedsæde i Mountain View, Californien. New Zealands regering offentliggjorde planer mandag, 18. februar kl. 2019, for en ny skat re -
 Udvikling af et moralsk kompas ud fra menneskelige teksterKan maskiner udvikle et moralsk kompas? Kredit:Patrick Bal Kunstig intelligens (AI) oversætter dokumenter, foreslår behandlinger til patienter, træffer købsbeslutninger og optimerer arbejdsgange.
Udvikling af et moralsk kompas ud fra menneskelige teksterKan maskiner udvikle et moralsk kompas? Kredit:Patrick Bal Kunstig intelligens (AI) oversætter dokumenter, foreslår behandlinger til patienter, træffer købsbeslutninger og optimerer arbejdsgange. -
 Robotter kan gå helt til Mars, men de kan ikke hente dagligvarerKredit:University of Cambridge I den populære fantasi, robotter er alternativt blevet portrætteret som venlige ledsagere eller eksistentiel trussel. Men selvom robotter bliver almindelige i mange
Robotter kan gå helt til Mars, men de kan ikke hente dagligvarerKredit:University of Cambridge I den populære fantasi, robotter er alternativt blevet portrætteret som venlige ledsagere eller eksistentiel trussel. Men selvom robotter bliver almindelige i mange
- Forskellige månefaser
- Facebook skal betale 100 mio. i italiensk skatteaftale
- De sociale konsekvenser af, at teenagere forlader Facebook
- Rapport:Facebook, FTC diskuterer bøde på flere milliarder dollar
- Du har sandsynligvis aldrig hørt om verdens største havvandring. Satellitdata hjælper videnskabsm…
- Indåndede nanopartikler leverer kraftig anticancer -cocktail til lungetumorer og blokerer resistens