


Kørsel af autonome biler uden for den slagne vej

En selvkørende bil kører ind i skoven. Kredit:Matthew Doude, CC BY-ND
Autonome køretøjer kan følge de generelle regler for amerikanske veje, genkender trafiksignaler og spormarkeringer, lægge mærke til krydsfelt og andre regelmæssige træk ved gaderne. Men de fungerer kun på godt afmærkede veje, der er omhyggeligt scannet og kortlagt på forhånd.
Mange asfalterede veje, selvom, har falmet maling, skilte tilsløret bag træer og usædvanlige kryds. Ud over, 1,4 millioner miles af amerikanske veje-en tredjedel af landets offentlige veje-er asfalterede, uden vejsignaler som vognbanemarkeringer eller stop-her-linjer. Det inkluderer ikke miles af private veje, ikke-asfalterede indkørsler eller terrængange.
Hvad skal en autonom bil følge efter en regel, når reglerne er uklare eller ikke-eksisterende? Og hvad skal passagererne gøre, når de opdager, at deres køretøj ikke kan få dem, hvor de skal hen?
Regnskab for det uklare
De fleste udfordringer ved udvikling af avancerede teknologier involverer håndtering af sjældne eller usædvanlige situationer, eller begivenheder, der kræver ydelse ud over et systems normale kapaciteter. Det er bestemt sandt for autonome køretøjer. Nogle eksempler på vej kan være at navigere i konstruktionszoner, støder på en hest og en vogn, eller se graffiti, der ligner et stopskilt. Off-road, mulighederne inkluderer den fulde variation af den naturlige verden, såsom træer nede over vejen, oversvømmelser og store vandpytter - eller endda dyr, der spærrer vejen.

Simuleret ørken, eng- og skovmiljøer genereret af Mississippi State University Autonomous Vehicle Simulator. Kredit:Chris Goodin, Mississippi State University, Forfatter oplyst
På Mississippi State University's Center for Advanced Vehicular Systems, vi har taget udfordringen op med at træne algoritmer for at reagere på omstændigheder, der næsten aldrig sker, er svære at forudsige og komplekse at skabe. Vi søger at sætte autonome biler i det sværeste mulige scenario:at køre i et område, bilen ikke har nogen forudgående viden om, uden pålidelig infrastruktur som vejmaling og trafikskilte, og i et ukendt miljø, hvor det er lige så sandsynligt at se en kaktus som en isbjørn.
Vores arbejde kombinerer virtuel teknologi og den virkelige verden. Vi skaber avancerede simuleringer af naturtro udendørs scener, som vi bruger til at træne kunstig intelligens -algoritmer til at tage et kamerafeed og klassificere, hvad det ser, mærkning af træer, himmel, åbne stier og potentielle forhindringer. Derefter overfører vi disse algoritmer til et specialbygget firehjulstræk-testkøretøj og sender det ud på vores dedikerede off-road testbane, hvor vi kan se, hvordan vores algoritmer fungerer og indsamle flere data for at føde ind i vores simuleringer.
Starter virtuel
Vi har udviklet en simulator, der kan skabe en lang række realistiske udendørs scener, som køretøjer kan navigere igennem. Systemet genererer en række landskaber i forskellige klimaer, som skove og ørkener, og kan vise, hvordan planter, buske og træer vokser med tiden. Det kan også simulere vejrskift, sollys og måneskin, og de nøjagtige placeringer af 9, 000 stjerner.

En vejudvaskning, set i virkeligheden, venstre, og i simulering. Kredit:Chris Goodin, Mississippi State University, Forfatter oplyst
Systemet simulerer også aflæsninger af sensorer, der normalt bruges i autonome køretøjer, såsom lidar og kameraer. Disse virtuelle sensorer indsamler data, der føder til neurale netværk som værdifulde træningsdata.
Bygger en testbane
Simuleringer er kun lige så gode som deres skildringer af den virkelige verden. Mississippi State University har købt 50 hektar jord, hvor vi udvikler en testbane til autonome terrængående køretøjer. Ejendommen er fremragende til off-road test, med usædvanligt stejle karakterer for vores område i Mississippi - op til 60 procent stigninger - og en meget forskelligartet bestand af planter.
Vi har valgt visse naturelementer i dette land, som vi forventer vil være særligt udfordrende for selvkørende biler, og replikerede dem nøjagtigt i vores simulator. Det giver os mulighed for direkte at sammenligne resultater fra simulering og forsøg fra det virkelige liv til at navigere i det faktiske land. Til sidst, Vi opretter lignende reelle og virtuelle parringer af andre typer landskaber for at forbedre vores køretøjs muligheder.

Halo Project -bilen kan indsamle data om kørsel og navigation i ulendt terræn. Kredit:Beth Newman Wynn, Mississippi State University, Forfatter oplyst
Indsamling af flere data
Vi har også bygget et testkøretøj, kaldet Halo Project, som har en elektrisk motor og sensorer og computere, der kan navigere i forskellige terrængående miljøer. Halo Project -bilen har yderligere sensorer til at indsamle detaljerede data om dens faktiske omgivelser, som kan hjælpe os med at opbygge virtuelle miljøer til at køre nye tests i.
To af dets lidarsensorer, for eksempel, er monteret i krydsende vinkler på forsiden af bilen, så deres bjælker fejer hen over den nærliggende jord. Sammen, de kan give oplysninger om, hvor ru eller glat overfladen er, samt at fange aflæsninger fra græs og andre planter og genstande på jorden.
Vi har set nogle spændende tidlige resultater fra vores forskning. For eksempel, we have shown promising preliminary results that machine learning algorithms trained on simulated environments can be useful in the real world. As with most autonomous vehicle research, der er stadig et stykke vej at gå, but our hope is that the technologies we're developing for extreme cases will also help make autonomous vehicles more functional on today's roads.
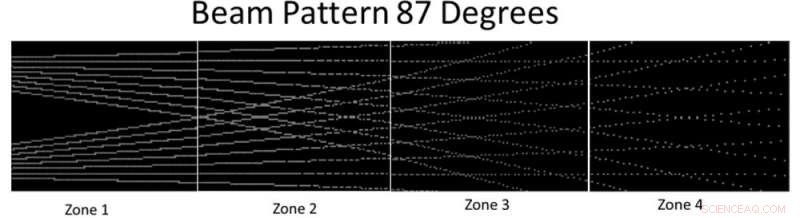
Lidar beams intersect, scanning the ground in front of the vehicle. Credit:Chris Goodin, Mississippi State University, Forfatter oplyst
Denne artikel er genudgivet fra The Conversation under en Creative Commons -licens. Læs den originale artikel. 
 Varme artikler
Varme artikler
-
 Afstemning om EU's online copyright-reform splitter sædvanlige allieredeKunstnere og lovgivere er uenige om foreslåede europæiske reformer af online ophavsretslovgivning, som modstandere siger til fordel for webgiganter Europa-Parlamentet stemmer onsdag om en meget ko
Afstemning om EU's online copyright-reform splitter sædvanlige allieredeKunstnere og lovgivere er uenige om foreslåede europæiske reformer af online ophavsretslovgivning, som modstandere siger til fordel for webgiganter Europa-Parlamentet stemmer onsdag om en meget ko -
 Walmart tager blå mærker fra Amazon-kampen i fjerde kvartalI denne 9. nov. 2017, fil foto, Walmart-medarbejder Kenneth White scanner genstande, mens han udfører en øvelse under en Walmart Academy-time i butikken i det nordlige Bergen, N.J. Walmart rapporterer
Walmart tager blå mærker fra Amazon-kampen i fjerde kvartalI denne 9. nov. 2017, fil foto, Walmart-medarbejder Kenneth White scanner genstande, mens han udfører en øvelse under en Walmart Academy-time i butikken i det nordlige Bergen, N.J. Walmart rapporterer -
 Beskytter vores energiinfrastruktur mod cyberangrebsynge deres Cybersafety -metode, Professor Stuart Madnick (til venstre), kandidatstuderende Shaharyar Khan (højre), og professor James Kirtley Jr. (ikke på billedet) identificerede flere cyber -sårbar
Beskytter vores energiinfrastruktur mod cyberangrebsynge deres Cybersafety -metode, Professor Stuart Madnick (til venstre), kandidatstuderende Shaharyar Khan (højre), og professor James Kirtley Jr. (ikke på billedet) identificerede flere cyber -sårbar -
 Professorer, der arbejder på at eliminere kønsbaserede fejl i open source-softwareKredit:CC0 Public Domain Cyklussen for udvikling af open source software (OSS) og kønsrepræsentation er, måske, ikke overraskende - kvinder er stærkt underrepræsenteret blandt OSS-udviklere. Som r
Professorer, der arbejder på at eliminere kønsbaserede fejl i open source-softwareKredit:CC0 Public Domain Cyklussen for udvikling af open source software (OSS) og kønsrepræsentation er, måske, ikke overraskende - kvinder er stærkt underrepræsenteret blandt OSS-udviklere. Som r