


Udvikling af en humanoid robotprototype, HRP-5P, i stand til tungt arbejde

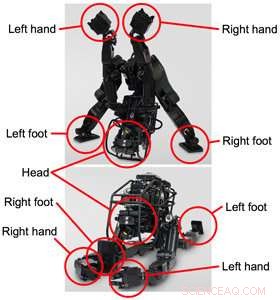
HRP-5P udseende (til venstre) og HRP-5P med ca. 13 kg bræt (højre). Kredit:Avanceret industriel videnskab og teknologi
Forskere har udviklet en humanoid robotprototype, HRP-5P, beregnet til selvstændigt at udføre tungt arbejde eller arbejde i farlige miljøer.
Som 182 cm, 101 kg humanoid robot, HRP-5P blev bygget på HRP-seriens teknologier ved at inkorporere nye hardwareteknologier. Inden for serien, den har uovertrufne fysiske evner. Dens robotintelligens omfatter miljømåling og genkendelse af objekter, planlægning og kontrol af hele kroppen, opgavebeskrivelse og udførelsesstyring, og yderst pålidelige systemiseringsteknologier. At huse intelligensen i denne krop har muliggjort autonom gipspladeinstallation af robotten, hvilket er et typisk eksempel på tungt arbejde på byggepladser. Brug af HRP-5P, som udviklingsplatform, i samarbejde mellem industri og akademi lover at fremskynde F &U i retning af praktisk anvendelse af humanoide robotter på byggepladser og i samling af store strukturer som fly og skibe.
Figur 1. Bøjning fremad (øverst) og med ben spredt frem og tilbage (nederst). Kredit:Avanceret industriel videnskab og teknologi
Den faldende fødselsrate i Japan forventes at forårsage alvorlig mangel på arbejdskraft i byggeri og mange andre industrier. Det er bydende nødvendigt at løse dette problem ved hjælp af robotteknologier. Disse teknologier giver også et overbevisende alternativ til at have bygningsarbejdere på byggepladser, flyfaciliteter, eller værfter udfører tungt arbejde, der er potentielt farligt. Imidlertid, det har været svært at gøre disse store byggepladser velegnede til robotter, som har afskrækket introduktion af robotter. Fordi humanoide robotter fysisk ligner mennesker, de kan fungere uden at kræve miljøændringer, muligvis fritage arbejdere for tungt arbejde.
I udviklingen af HRP -serien, AIST har samarbejdet med flere private virksomheder, herunder Kawada Industries Inc. (nu Kawada Robotics Corp.), og har udviklet grundlæggende teknologier til praktisk anvendelse. HRP-2 var i stand til at gå tobenet, ligger ned, stående, gå på smalle stier, og andre handlinger. HRP-3 kunne gå på glatte overflader og stramme bolte på broer med fjernbetjening. Katastrofe-respons humanoid robotforskning i gang på AIST siden 2011 førte til en revideret version af HRP-2 med forbedrede fysiske evner (såsom lemlængde, bevægelsesområde, og fælles output), som kunne gå på ujævnt terræn, drejeventiler, og udføre andre opgaver semi-autonomt baseret på 3-D miljømåling. Imidlertid, dens fysiske evner var stadig utilstrækkelige til tungt arbejde såsom installation af gipsplader, og den manglede tilstrækkelig frihedsgrad og tilstrækkelig bevægelig række af led til at efterligne menneskelig bevægelse i komplekse miljøer. Mod denne ende, AIST forfulgte udviklingen af den humanoide robot, HRP-5P, med fysiske evner, der gør det muligt at erstatte folk, der udfører hårdt arbejde.
Desuden, HRP-5P arver teknologierne i HRP-serien og anvender patenteret teknologi fra Honda Motor Co., Ltd.
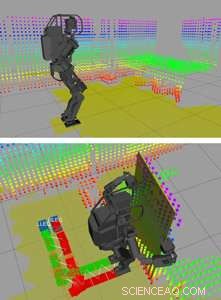
Figur 2. Kort over det omkringliggende område (øverst) og gangplan (nederst). Kredit:Avanceret industriel videnskab og teknologi
En del af udviklingen af HRP-5P blev støttet af F&U bestilt af New Energy and Industrial Technology Development Organization (NEDO), "F&U på meget pålidelige humanoide robotsystemer, der kan fungere i ustrukturerede miljøer" i "autonome humanoide robotter (innovativt elementrobotteknologi-område)" af "F&U om næste generations kerneroboteknologier, "og støtte til videnskabelig forskning fra Japan Society for Promotion of Science, "Målretning af bevægelsesplanlægning i hele kroppen baseret på erhvervelse af miljømodeller, der gør det muligt for humanoide robotter at tilpasse sig ukendte miljøer" (forskningsprojektnummer JP17H07391).
Den humanoide robotprototype HRP-5P blev udviklet med en robust krop og avanceret intelligens til at arbejde autonomt og give en alternativ kilde til tungt arbejde.
- I en højde på 182 cm og en vægt på 101 kg, HRP-5P har en krop med i alt 37 frihedsgrader:to i nakken, tre i livet, otte i armene, seks i benene, og to i hænderne. Bortset fra hænderne, dette repræsenterer den hidtil mest bevægelsesfrihed i HRP -serien. Sammenlignet med den reviderede version af HRP-2, tilføjelse af en grad af frihed til taljen og en til bunden af armene har muliggjort operationer, der mere ligner menneskelig bevægelse. Derfor, ved hjælp af begge arme, HRP-5P kan håndtere store genstande såsom gipsplader (1820 × 910 × 10 mm, ca. 11 kg) eller krydsfinerplader (1800 × 900 × 12 mm, ca. 13 kg).
- At efterligne menneskelig bevægelse af robotten uden lige så mange frihedsgrader som mennesker, forskerne sikrede et bredere bevægeligt udvalg af led i hofte- og taljeområderne, hvor flere led er koncentreret. For eksempel, hofteled, der bøjer og forlænger benene, har en bevægelsesområde på 140 ° hos mennesker og 202 ° i HRP-5P (fig. 1), og taljeled, der drejer overkroppen, har en bevægelsesområde på 80 ° hos mennesker og 300 ° i HRP-5P. Dette muliggør arbejde fra robotten i forskellige stillinger, som f.eks. når den er dybt krøllet med overkroppen snoet.
- Fælles drejningsmoment og hastighed blev cirka fordoblet i gennemsnit i forhold til den reviderede HRP-2, ved at anvende motorer med høj effekt, tilføjer køling til drivmekanismen, og vedtagelse af et fælles drivsystem med visse samlinger med flere motorer. Som resultat, robotten kan udføre arbejde med tung belastning, såsom at løfte et gipsplade fra en stak. (Hver arm af HRP-5P, forlænget vandret, kan bære en vægt på 2,9 kg, sammenlignet med 1,3 kg for den reviderede version af HRP-2 og 0,9 kg for HRP-4.)
- Ved hjælp af hovedmonterede sensorer, robotten erhverver konstant 3D-målinger af det omgivende miljø (med en frekvens på 0,3 Hz). Selvom synsfeltet blokeres af objekter, der bruges i arbejdet, lagrede og opdaterede måleresultater muliggør udførelse af gangplanen, mens den bærer et panel eller korrigerer gang, når fødderne glider. (Fig. 2).
- Læring involverer et konvolutionsnervalt neuralt netværk ved hjælp af en nybygget billeddatabase over arbejdsobjekter. Robotten kan registrere ti typer 2-D-objektområder med en høj præcision på 90 % eller mere endda mod lav kontrastbaggrund eller under svag belysning (fig. 3).
- Det var muligt at bygge et yderst pålideligt robotsystem og opretholde kvaliteten af stor software (med ca. 250, 000 linjer kode) ved at arrangere et virtuelt testmiljø for robotintelligensen i Choreonoid -robotsimulatoren og overvåge software -regression i 24 timer.
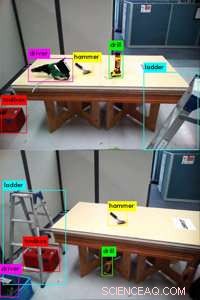
Figur 3. Eksempel på objektdetektering. Kredit:Avanceret industriel videnskab og teknologi
Integration of these technologies has enabled autonomous gypsum board installation in which HRP-5P handles and carries large, heavy objects at a simulated residential construction site independently.
Specifikt, this work involves the following series of operations.
- Generate a 3-D map of the surrounding environment, detect objects, and approach the workbench.
- Lean against the workbench, slide one of the stacked gypsum boards to separate it, and then lift it.
- While recognizing the surrounding environment, carry the gypsum board to the wall.
- Lower the gypsum board and stand it against the wall.
- Using high-precision AR markers, recognize and pick up a tool.
- Holding a furring strip to keep HRP-5P itself steady, screw the gypsum board into the wall.
R&D on robot intelligence will be promoted using this platform, targeting an alternative source of autonomous manual labor at residential or office building sites, and in assembly of large structures such as aircraft and ships. This will compensate for labor shortages, free people from heavy labor, and help them focus on more high-value-added work.
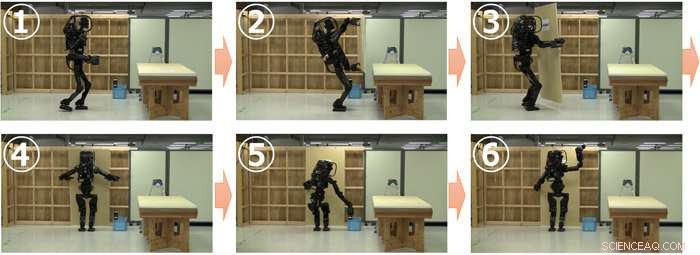
Figure 4. Autonomous gypsum board installation by HRP-5P. Credit:Advanced Industrial Science and Technology
Sidste artikelHvad er augmented reality, alligevel?
Næste artikelDette sted er gruberne:Kina åbner luksushotel i stenbrud
 Varme artikler
Varme artikler
-
 Gorilla Glass for at have forstærket beskyttelse til telefoner for at overleve oh-no dropsKredit:Corning Verdens mest avancerede glas tilgængeligt til smartphones og tablets:det er den måde, Corning Gorilla Glass 6 blev beskrevet af dets skabere ved en begivenhed i denne uge. Corning
Gorilla Glass for at have forstærket beskyttelse til telefoner for at overleve oh-no dropsKredit:Corning Verdens mest avancerede glas tilgængeligt til smartphones og tablets:det er den måde, Corning Gorilla Glass 6 blev beskrevet af dets skabere ved en begivenhed i denne uge. Corning -
 NewsGuard, ny satsning for at bekæmpe falske nyhederNewsGuard er en ny satsning på at give pålidelighedsvurderinger om medier To fremtrædende amerikanske journalister annoncerede mandag planer om at lancere et projekt kaldet NewsGuard, som vil give
NewsGuard, ny satsning for at bekæmpe falske nyhederNewsGuard er en ny satsning på at give pålidelighedsvurderinger om medier To fremtrædende amerikanske journalister annoncerede mandag planer om at lancere et projekt kaldet NewsGuard, som vil give -
 Hurtig magnetisk 3-D print af menneskelige cellerIshwar Puri, centrum, med sit forskerhold, Sarah Mishriki, Ph.d.-kandidat ved School of Biomedical Engineering og hovedforfatter, og Rakesh Sahu, en forskningsmedarbejder. Kredit:Jin Lee, McMaster Uni
Hurtig magnetisk 3-D print af menneskelige cellerIshwar Puri, centrum, med sit forskerhold, Sarah Mishriki, Ph.d.-kandidat ved School of Biomedical Engineering og hovedforfatter, og Rakesh Sahu, en forskningsmedarbejder. Kredit:Jin Lee, McMaster Uni -
 Robotter navigerer autonomt under jorden i DARPA-udfordringenCoSTAR-medlem og Caltech-kandidatstuderende Amanda Bouman driver en robot kaldet Spot, som blev leveret af Boston Dynamics med autonomi smarts leveret af JPL. Kredit:NASA/JPL-Caltech Uanset om rob
Robotter navigerer autonomt under jorden i DARPA-udfordringenCoSTAR-medlem og Caltech-kandidatstuderende Amanda Bouman driver en robot kaldet Spot, som blev leveret af Boston Dynamics med autonomi smarts leveret af JPL. Kredit:NASA/JPL-Caltech Uanset om rob
- Sådan laver du en Bimetal Strip
- Vandkvaliteten kan ændre sig i bygninger, der er lukket ned under COVID-19-pandemien, siger ingeniø…
- Gnagere af Arizona
- Kunne insektlarver hjælpe med at løse voldtægtssager?
- One-pot teknik skaber strukturer med potentiale for mere effektiv fremstilling og energilagring
- 10 opfindelser af Thomas Edison (som du aldrig har hørt om)