


Et tilfældigt begrænset bevægelsesplanlægningssystem til højdimensionelle robotter
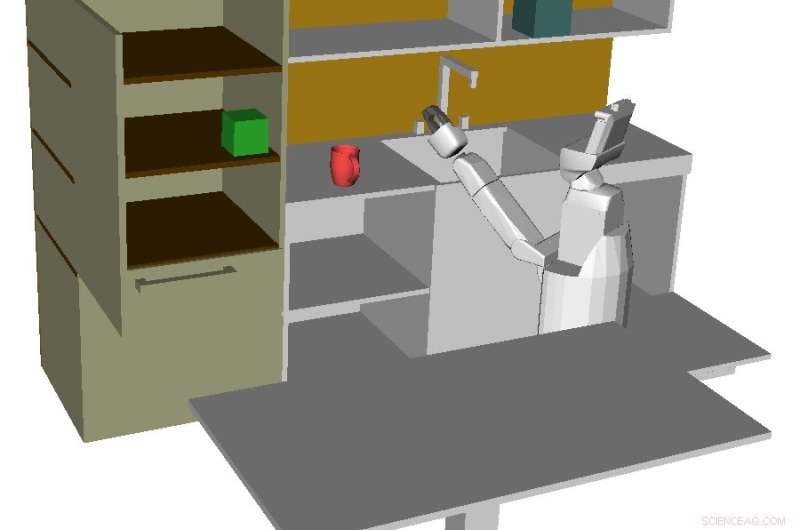
Simuleringsmiljø for en robot, hvor forskerne testede deres algoritme. Kredit:Dai et al.
Forskere ved MIT's datalogi og kunstig intelligenslaboratorium har for nylig udviklet et chansebegrænset bevægelsesplanlægningssystem, der kan anvendes på robotter med høj grad af frihed (DOF) under bevægelsesusikkerhed og i tilfælde af ufuldkommen statsinformation. Deres tilgang, skitseret i et papir, der er forududgivet på arXiv, kan finde mulige baner, der opfylder en bruger-specificeret grænse for sandsynligheden for kollision.
"Hovedinspirationen i dette arbejde er begrænsningen af eksisterende tilfældighedsbegrænsede bevægelsesplanlæggere, "Siyu Dai, en af de forskere, der udførte undersøgelsen, fortalte TechXplore. "Jeg fandt ud af, at mange state-of-the-art bevægelsesplanlæggere kræver, at forhindringer formuleres i konvekse former, hvilket er umuligt for planlægning i højdimensionelle domæner, for eksempel manipulator bevægelsesplanlægning. Andre almindelige tilfældighedsbegrænsede bevægelsesplanlæggere er baseret på hurtigt udforskende random tree (RRT) metoder, hvoraf hastigheden i højdimensionel planlægningsopgave er meget bekymrende. "
For at løse begrænsningerne ved eksisterende bevægelsesplanlægningssystemer, Dai og hendes kolleger satte sig for at udvikle en hurtigreaktiv og tilfældighedsbegrænset bevægelsesplanlægger. En sådan bevægelsesplanlægger ville være særlig nyttig til robotter, der udfører opgaver, der er udsat for alvorlige forstyrrelser og begrænsede observationer, såsom undervandsmanipulation.
Probabilistisk Chekov (p-Chekov), det system de skabte, er baseret på deres tidligere arbejde med deterministisk bevægelsesplanlægning, som integrerede baneoptimering i en sparsom køreplansramme. P-Chekov bruger en lineær-kvadratisk Gaussisk bevægelsesplanlægningstilgang til at estimere en robots sandsynlighedsfordeling. Den anvender derefter kvadraturteorier til waypointkollisionsrisikoestimeringer og tilpasser risikoallokeringstilgange for at tildele tilladte sandsynligheder for fejl til waypoints.
"Det chancebegrænsede bevægelsesplanlægningssystem, der er udviklet i vores papir, inkluderer en deterministisk planlægningskomponent og en risikovurderingskomponent, " Dai forklarede. "Den deterministiske komponent konstruerer først en køreplan bestående af gennemførlige, kollisionsfrie kanter baseret på miljøoplysningerne. I online planlægningsopgaver, den søger derefter efter en mulig bane fra køreplanen og udjævner den med en baneoptimering. Denne bane overføres derefter til risikovurderingskomponenten, som vurderer risikoen for kollision baseret på estimering af støj."
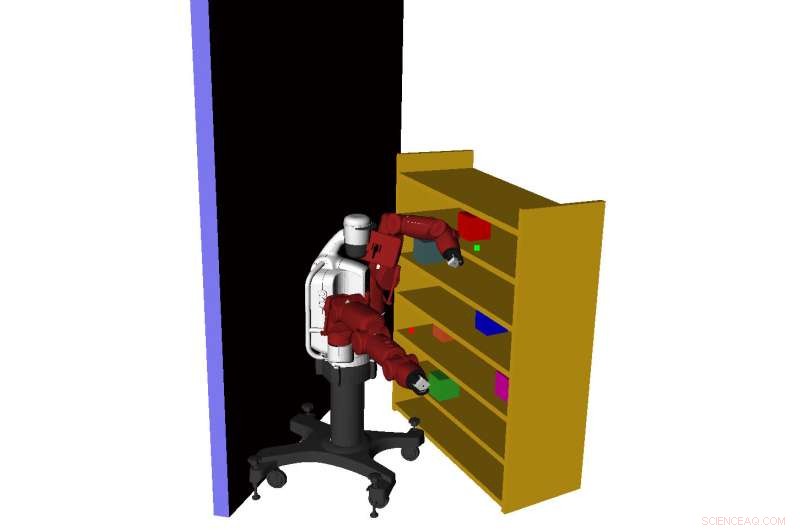
Simuleringsmiljø for en robot, hvor forskerne testede deres algoritme. Kredit:Dai et al.
Hvis risikoen for kollision beregnet af P-Chekovs risikovurderingskomponent overtræder den foruddefinerede chancebegrænsning, banen returneres til den deterministiske planlægger og nye begrænsninger tilføjes, for at finde en bane med lavere risiko. Hvis risikoen for sammenstød opfylder chancebegrænsningen, systemet udfører simpelthen den foreslåede bane.
I modsætning til eksisterende risikobevidste bevægelsesplanlæggere, P-Chekov kan anvendes til robotplanlægningsopgaver med høj DOF, uden at skulle formulere forhindringer til konvekse former. I simulationstests, systemet reducerede effektivt risikoen for kollision og tilfredsstillede brugerspecificerede chancebegrænsninger i virkelige planlægningsscenarier, som ofte støder på højdimensionelle robotter.
"Vi etablerede et tilfældig begrænsning af bevægelsesplanlægningssystem, der kan inkorporere højdimensionelle bevægelsesplanlægningsopgaver, " sagde Dai. "Dette betyder, at tilfældighedsbegrænset bevægelsesplanlægning ikke længere er begrænset til kørselsopgaver, men kan nu anvendes på mobile robotter med arme, for eksempel menneskelige støtterobotter og undervandsmanipulatorer, som kan lave planer baseret på forskellige krav til risikoniveau."
I fremtiden, P-Chekov kunne anvendes på en række højdimensionelle robotter, forbedre deres bevægelsesplanlægning under usikkerhed. På trods af sine lovende resultater, resultaterne af systemets planlægningsfase kan nogle gange være alt for konservative, på grund af suboptimale risikoallokeringer og et begrænset antal kvadraturknudepunkter.
I foreløbige tests, forskerne er allerede begyndt at evaluere teknikker, der kan forbedre systemets anvendelighed. I mellemtiden, de planlægger også at forbedre P-Chekovs algoritme til estimering af kollisionssandsynlighed, for yderligere at styrke sin evne til at undgå konflikter.
"Hovedretningen for vores næste undersøgelser vil være at forbedre risikovurderingsalgoritmen for at fremskynde hele bevægelsesplanlægningsprocessen og gøre planlæggeren hurtigreaktiv, "Sagde Dai.
© 2018 Science X Network
 Varme artikler
Varme artikler
-
 Chinas JD.com ser til Silicon Valley center for innovationDette udaterede billede leveret af JD.com viser et autonomt leveringskøretøj. Dr. Hui Cheng, lederen af robotforskning ved JD.s Silicon Valley Research Center, talte for nylig med The Associated Pre
Chinas JD.com ser til Silicon Valley center for innovationDette udaterede billede leveret af JD.com viser et autonomt leveringskøretøj. Dr. Hui Cheng, lederen af robotforskning ved JD.s Silicon Valley Research Center, talte for nylig med The Associated Pre -
 Forskning undersøger smarte motorvejsskilte for at forhindre uheld ved forkert kørselFSUs forskerhold vurderede højteknologiske modforanstaltninger til forkert kørsel. Kredit:Florida Department of Transportation Innovativ trafiksikkerhedsforskning fra Florida State University, ink
Forskning undersøger smarte motorvejsskilte for at forhindre uheld ved forkert kørselFSUs forskerhold vurderede højteknologiske modforanstaltninger til forkert kørsel. Kredit:Florida Department of Transportation Innovativ trafiksikkerhedsforskning fra Florida State University, ink -
 Tumblr forbyder porno for at rydde op i blogplatformenTumblr begynder at håndhæve sit forbud mod voksenindhold den 17. december, 2018, give brugere, der er vært for uønsket eksplicit indhold, en mulighed for at tage deres billeder andre steder, ifølge ad
Tumblr forbyder porno for at rydde op i blogplatformenTumblr begynder at håndhæve sit forbud mod voksenindhold den 17. december, 2018, give brugere, der er vært for uønsket eksplicit indhold, en mulighed for at tage deres billeder andre steder, ifølge ad -
 Forskere finder en måde at hjælpe brændselsceller med at fungere bedre, holde sig ren i kuldenDen her udviklede katalysator viser et stort potentiale til grundigt at beskytte brændselscellen under ikke kun den kontinuerlige drift, men også under hyppige koldstartsperioder selv under ekstremt k
Forskere finder en måde at hjælpe brændselsceller med at fungere bedre, holde sig ren i kuldenDen her udviklede katalysator viser et stort potentiale til grundigt at beskytte brændselscellen under ikke kun den kontinuerlige drift, men også under hyppige koldstartsperioder selv under ekstremt k
- Mulige beviser for et ekstrasolar objekt, der rammer Jorden i 2014
- Væske-lignende bevægelse i krystaller kan forklare deres lovende adfærd i solceller
- Metallisk skum kan opsuge lyd under højt tryk, miljøer med høje temperaturer såsom jetmotorer
- Tilslørede supernovaer giver et fingerpeg om stjernernes udvikling
- En ny politisk brief om CO2 -neutralitet for kommuner verden over
- Toyota advarer om at kunne forlade Storbritannien under Brexit uden aftale:rapport