


Elektronisk handske giver robotter en følelse af berøring
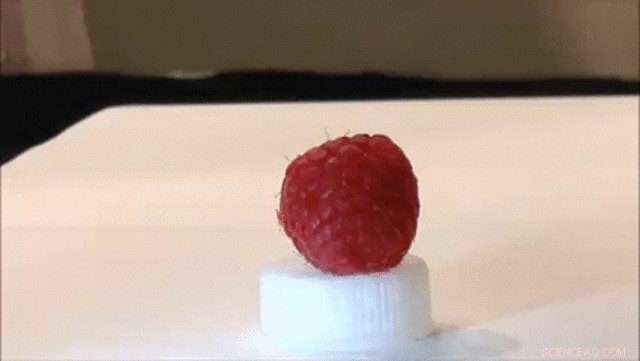
Stanford-forskere udviklede den hudlignende sensor på fingerspidsen af denne robothånd, og programmerede den til at røre frugten uden skader. En dag håber de at oprette kontrolsystemer, der gør det muligt for en robot at opfatte objekternes egenskaber og selvstændigt beregne, hvor meget kraft der skal anvendes. Kredit:Bao Lab
Stanford -ingeniører har udviklet en elektronisk handske, der indeholder sensorer, der en dag kan give robothåndene den slags fingerfærdighed, som mennesker tager for givet.
I et papir udgivet 21. november i Science Robotics , kemiingeniør Zhenan Bao og hendes team demonstrerede, at sensorerne fungerer godt nok til, at en robothånd kan røre en sart bær og håndtere en pingpongbold uden at klemme dem.
"Denne teknologi sætter os på en vej til en dag at give robotter den slags sansemuligheder, der findes i menneskelig hud, "Sagde Bao.
Bao sagde, at sensorerne i handskens fingerspidser samtidig måler intensiteten og retningen af tryk, to kvaliteter, der er afgørende for at opnå manuel fingerfærdighed. Forskerne skal stadig perfektionere teknologien til automatisk at styre disse sensorer, men når de gør det, en robot iført handsken kunne have fingerfærdighed til at holde et æg mellem tommelfinger og pegefinger uden at smadre det eller lade det glide.
Elektronik efterligner livet
Den elektroniske handske efterligner den måde, hvorpå lag af menneskelig hud arbejder sammen for at give vores hænder deres ekstraordinære følsomhed.
Vores ydre hudlag er gennemsyret af sensorer til at detektere tryk, varme og andre stimuli. Vores fingre og håndflader er særligt rige på berøringssensorer. Disse sensorer fungerer sammen med et underlag af hud kaldet spinosum, et ujævnt mikroskopisk terræn af bakker og dale.
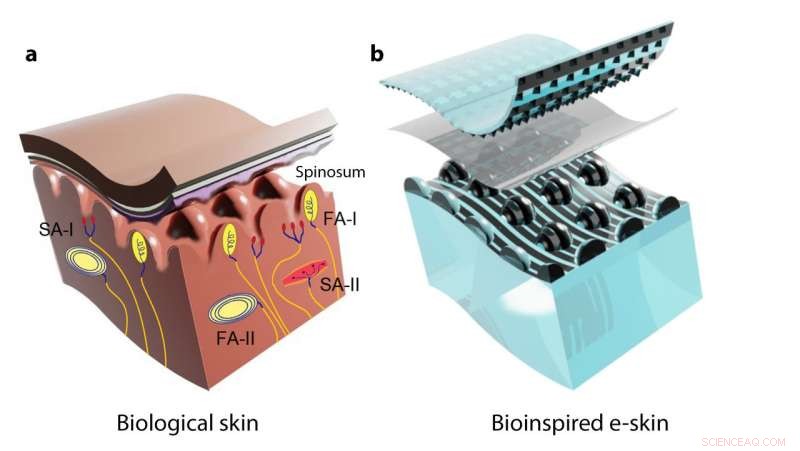
Et tværsnit af menneskelig hud fra fingerspidsen, der viser vigtige sansestrukturer (til venstre). Denne struktur tjente som inspiration for designet af e-skin (højre). Kredit:Boutry et al., Sci. Robot . 3, eaau6914 (2018)
Den ujævnhed er kritisk. Når vores finger rører et objekt, det ydre hudlag bevæger sig tættere på spinosum. En let berøring mærkes hovedsageligt af sensorer tæt på bakketoppene. Mere intenst pres tvinger den ydre hud ned i spinosums dale, udløser mere intense berøringsfornemmelser.
Men måling af trykets intensitet er kun en del af, hvad spinosum muliggør. Dette ujævne underlag hjælper også med at afsløre trykretningen, eller forskydningskraft. En finger, der trykker mod nord, f.eks. skaber stærke signaler på de sydlige skråninger af de mikroskopiske bakker. Denne evne til at mærke forskydningskraft er en del af det, der hjælper os forsigtigt, men fast med at holde et æg mellem tommelfinger og pegefinger.
Postdoktor Clementine Boutry og kandidatstuderende Marc Negre ledede udviklingen af de elektroniske sensorer, der efterligner denne menneskelige mekanisme. Hver sensor på fingerspidsen af robothandsken er lavet af tre fleksible lag, der fungerer sammen. Det øverste og nederste lag er elektrisk aktivt. Forskerne lagde et net af elektriske ledninger på hver af de to modstående overflader, som rækker i et felt, og vendte disse rækker vinkelret på hinanden for at skabe et tæt array af små sansende pixels. De gjorde også det nederste lag ujævnt som spinosum.
Gummiisolatoren i midten holdt simpelthen det øverste og nederste lag af elektroder fra hinanden. Men den adskillelse var kritisk, fordi elektroder, der er tæt på uden at røre ved dem, kan lagre elektrisk energi. Da robotfingeren pressede ned, klemmer de øvre elektroder tættere på bunden, den lagrede energi steg. Bakkerne og dalene i bundlaget gav en måde at kortlægge trykets intensitet og retning til bestemte punkter på de vinkelrette gitre, meget gerne menneskelig hud.
Sart berøring
For at teste deres teknologi placerede forskerne deres tre-lags sensorer på fingrene på en gummihandske, og læg handsken på en robothånd. Til sidst er målet at integrere sensorer direkte i et hudlignende dæksel til robothænder. I et forsøg, de programmerede den handskebårne robothånd til forsigtigt at røre ved et bær uden at beskadige det. De programmerede også den handskede hånd til at løfte og flytte en pingpongbold uden at knuse den, ved at bruge sensoren til at registrere den passende forskydningskraft til at gribe bolden uden at tabe den.
Bao sagde, at med korrekt programmering kunne en robothånd iført den aktuelle berøringsfølende handske udføre en gentagen opgave, såsom at løfte æg fra et transportbånd og placere dem i kartoner. Teknologien kan også have applikationer inden for robot-assisteret kirurgi, hvor præcis berøringskontrol er afgørende. Men Baos ultimative mål er at udvikle en avanceret version af handsken, der automatisk anvender den rigtige mængde kraft til at håndtere et objekt sikkert uden forudgående programmering.
"Vi kan programmere en robothånd til at røre ved et hindbær uden at knuse det, men vi er langt fra at kunne røre og opdage, at det er hindbær og sætte robotten i stand til at samle det op, " hun sagde.
 Varme artikler
Varme artikler
-
 Boeing-pilottræning på 737 MAX utilstrækkelig:Etiopien-styrtrapport2019-styrtet af Boeing 737 MAX på Nairobi seks minutter efter start dræbte alle 157 personer om bord Etiopiens undersøgelse af sidste års Ethiopian Airlines-styrt viste, at Boeing ikke leverede ti
Boeing-pilottræning på 737 MAX utilstrækkelig:Etiopien-styrtrapport2019-styrtet af Boeing 737 MAX på Nairobi seks minutter efter start dræbte alle 157 personer om bord Etiopiens undersøgelse af sidste års Ethiopian Airlines-styrt viste, at Boeing ikke leverede ti -
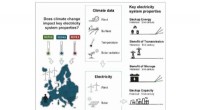 Europas elnet vil stadig fungere, selvom verden smuldrer:studieDette grafiske abstrakt viser, hvordan forskere brugte forskellige fremskrivninger af klimatiske udfald i det 21. århundrede til at vurdere, hvor vigtige nøgletallene for et meget vedvarende elsystem
Europas elnet vil stadig fungere, selvom verden smuldrer:studieDette grafiske abstrakt viser, hvordan forskere brugte forskellige fremskrivninger af klimatiske udfald i det 21. århundrede til at vurdere, hvor vigtige nøgletallene for et meget vedvarende elsystem -
 Apple i forhandlinger om at købe Intel smartphone chip -enhed:rapportApple har investeret i sine egne mobile chips for at øge ydeevnen og funktioner i sine enheder Apple er i forhandlinger om at købe Intels smartphone -modemchip -enhed, et træk, der ville hjælpe iP
Apple i forhandlinger om at købe Intel smartphone chip -enhed:rapportApple har investeret i sine egne mobile chips for at øge ydeevnen og funktioner i sine enheder Apple er i forhandlinger om at købe Intels smartphone -modemchip -enhed, et træk, der ville hjælpe iP -
 Denne citron kan hjælpe maskinlæring med at skabe bedre lægemidlerPurdue -forskere har skabt et nyt system, kaldet citron, til hurtig minedrift af biomolekylære interaktionsdata til brug med maskinindlæringsmetoder til design af lægemidler. Kredit:Billede leveres
Denne citron kan hjælpe maskinlæring med at skabe bedre lægemidlerPurdue -forskere har skabt et nyt system, kaldet citron, til hurtig minedrift af biomolekylære interaktionsdata til brug med maskinindlæringsmetoder til design af lægemidler. Kredit:Billede leveres
- Polymerfilm består elektronkanontest
- Lille titaniumbarriere stopper stort problem i brændstofproducerende solceller
- Big data peger menneskeheden på nye mineraler, nye indskud (opdatering)
- Tidspunktet for migration ændrer sig for sangfugle på Stillehavskysten
- Forskere bruger Large Millimeter Telescope til at observere en kraftig molekylær vind i en aktiv sp…
- Innovativ tilgang til undersøgelse af budgetter til subduktionsslip