


Ingeniører udvikler et HAL 9000-type AI-system til overvågning af planetbasestationer
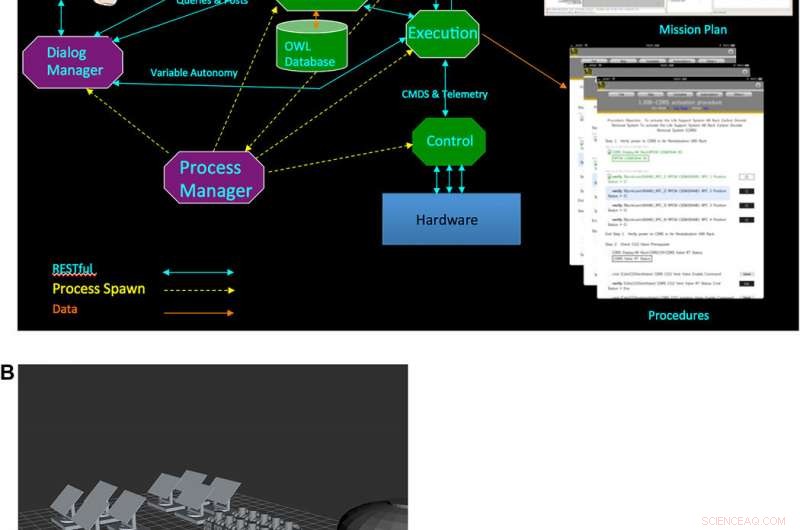
Fig. 1 En intelligent agent, ligesom HAL 9000. (A) Arkitektonisk design på topniveau CASE. Planlæggeren genererer en aktivitetsplan, hvis handlinger er procedurer, der køres af eksekveringssystemet, hvilken, på tur, grænseflader til hardwaren gennem kontrolsoftwaren. Planlægnings- og udførelsessystemerne trækker information fra og opdaterer systemontologien, en smart database. En procesleder skaber hovedkomponenterne i systemet og rekonstituerer processer, hvis deres understøttende computerinfrastruktur svigter. Brugeren interagerer med agenten gennem en dialogmanager. (B) Planetbasen gengivet i vores robotvisualiseringssystem (wiki.ros.org/rviz). Robotten ved kontrolpanelet forbinder solpaneler (i baggrunden) til batterier (højre midt i jorden) og batterier til strømbokse (sorte kasser), der, på tur, oprette forbindelse til levestedet (højre forgrund). Den anden robot udfører opdagelses- og henteopgaver. Kredit: Science Robotics (2018). DOI:10.1126/scirobotics.aav6610
Et team af ingeniører hos TRACLabs Inc. i USA gør indhug i oprettelsen af et planetarisk basestationsovervågningssystem, der i nogle henseender ligner Hal 9000 - det berygtede AI -system i filmen 2001:A Space Odyssey . I dette tilfælde, det kaldes kognitiv arkitektur for rumagenter (CASE) og er skitseret i et Focus -stykke af Pete Bonasso, den primære ingeniør, der arbejder på projektet, i journalen Science Robotics .
Bonasso forklarer, at han har haft en interesse i at skabe en rigtig Hal 9000 lige siden han så filmen som universitetsstuderende – minus menneskedrabet, selvfølgelig. Hans system er designet til at køre en base på en anden planet, såsom Mars. Det er beregnet til at tage sig af det mere hverdagsagtige, men kritiske opgaver involveret i at opretholde en beboelig planetarisk base, såsom at opretholde iltniveauet og tage sig af affald. Han bemærker, at et sådant system skal vide, hvad det skal gøre, og hvordan det skal gøres, udfører aktiviteter ved hjælp af hardware som robotarme. Til det formål, CASE er designet som et trelags system. Den første har ansvaret for at kontrollere hardware, såsom strømsystemer, livsstøtte, etc.
Det andet lag er mere smart - det er ansvarligt for at køre softwaren, der styrer hardwaren. Det tredje lag er endnu smartere, ansvarlig for at komme med løsninger på problemer, efterhånden som de opstår - hvis der sker skade på et modul, for eksempel, det skal lukkes af fra andre moduler så hurtigt som muligt. Systemet har også det, Bonasso beskriver som et ontologisk system-dets opgave er at være selvbevidst, så systemet kan foretage dømmekald, når man sammenligner data fra sensorer med det, det har lært tidligere og med oplysninger modtaget fra mennesker. Til det formål, systemet forventes at interagere med disse mennesker på måder, der ligner dem, der er skildret i filmen.
Bonasso rapporterer, at han og hans team har bygget en virtual reality-prototype af en planetbase, som CASE indtil videre har formået at køre i op til fire timer. Han erkender, at der skal arbejdes meget mere. Heldigvis de har stadig meget tid, da planer for menneskelig beboelse på Mars og videre stadig er årtier væk.
© 2018 Science X Network
 Varme artikler
Varme artikler
-
 EU godkender IBMs køb på 34 mia. USD af Red HatIBMs forbindelse med Red Hat bliver en af de største teknologifusioner nogensinde EUs magtfulde antitrustmyndighed godkendte torsdag IBMs opkøb af open source-softwarevirksomheden Red Hat, en af
EU godkender IBMs køb på 34 mia. USD af Red HatIBMs forbindelse med Red Hat bliver en af de største teknologifusioner nogensinde EUs magtfulde antitrustmyndighed godkendte torsdag IBMs opkøb af open source-softwarevirksomheden Red Hat, en af -
 Indias Jet Airways vil købe 75 Boeing-jetfly i rækkefølge på flere milliarder dollarsEn Jet Airways Boeing 737 på billedet i 2015:flyselskabet har annonceret en ordre på 75 Boeing 737 MAX -fly Det indiske flyselskab Jet Airways har indgået en aftale om at købe 75 Boeing 737 MAX -f
Indias Jet Airways vil købe 75 Boeing-jetfly i rækkefølge på flere milliarder dollarsEn Jet Airways Boeing 737 på billedet i 2015:flyselskabet har annonceret en ordre på 75 Boeing 737 MAX -fly Det indiske flyselskab Jet Airways har indgået en aftale om at købe 75 Boeing 737 MAX -f -
 Toyota, Panasonic annoncerer satsning på grønne autobatterierKredit:CC0 Public Domain Toyota Motor Corp. og Panasonic Corp. siger, at de opretter et joint venture til forskning, fremstille og sælge batterier til økologiske biler, en stadig mere lukrativ sek
Toyota, Panasonic annoncerer satsning på grønne autobatterierKredit:CC0 Public Domain Toyota Motor Corp. og Panasonic Corp. siger, at de opretter et joint venture til forskning, fremstille og sælge batterier til økologiske biler, en stadig mere lukrativ sek -
 Ethiopian Airlines siger, at analysen af flyrekorder begynderEtiopiske slægtninge til styrtofre sørger og sørger over det sted, hvor Ethiopian Airlines Boeing 737 Max 8 styrtede ned kort efter start søndag og dræbte alle 157 ombord. nær Bishoftu, sydøst for Add
Ethiopian Airlines siger, at analysen af flyrekorder begynderEtiopiske slægtninge til styrtofre sørger og sørger over det sted, hvor Ethiopian Airlines Boeing 737 Max 8 styrtede ned kort efter start søndag og dræbte alle 157 ombord. nær Bishoftu, sydøst for Add
- Forskere finder værdi i sammenligning af flere strategier for matematikundervisning og -læring
- Sådan formes Gravity Drainage Piping
- Elektro-sprayede mikrodråber hjælper med at dræbe bakterier og vira
- Summen af tre terninger for 42 er endelig løst - ved hjælp af en planetarisk computer fra den vi…
- Hyundai suspenderer indenlandsk produktion på grund af Kinas udbrud
- Ny beskyttelsesmaske til medicinsk personale