


EuMoBot:Replikering af euglenoid -bevægelse i en blød robot
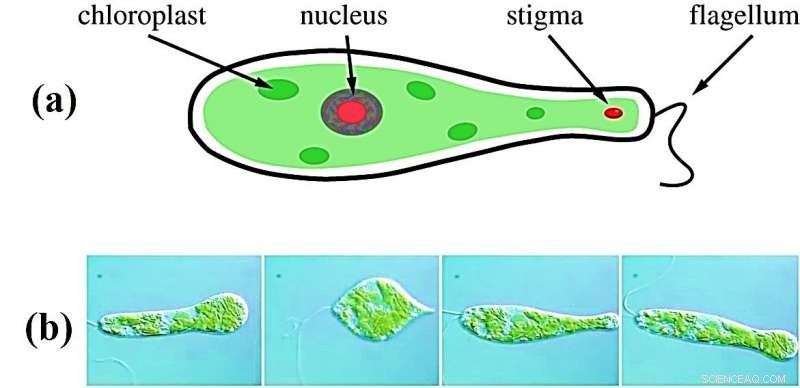
a) Skematisk illustration af en euglenoid organisme, der viser forskellige cellulære organismer, herunder en flagel. Billede tilpasset fra:IEE Robot. Autom. Lett., doi:10.1109/LRA.2017.2726113, b) Sekvens af billeder fra bevægelsen af Eutreptiella spirogyra under euglenoid bevægelse. Billeder gengivet med tilladelse fra, Richard E. Triemer, Euglenoid-projektet. Kredit:RSIF, doi:10.1098/rsif.2018.0301
Svømning er en form for bevægelse, der anvendes af mange organismer på tværs af en lang række skalaer i naturen. Mikroorganismer med lille masse, der møder dominans af viskøse kræfter i mediet, kræver en formændring, der ikke varierer med tiden for at opnå fluidisk fremdrift på linje med hydrodynamikken. For at overvinde denne udfordring, encellede flagellater af Euglena-familien udviklede en karakteristisk bevægelse kendt som 'euglenoid bevægelse', hvor kroppen væsentligt ændrer form, tillader organismen at navigere gennem tyktflydende væsker og små rum. Denne evne til at ændre kropsformen og bevæge sig gennem trange rum og rodede omgivelser er særligt attraktiv i konstruktion af biomimetiske robotter. Eksempelapplikationer af miniaturerobotter inkluderer bevægelse gennem biologiske væsker under medicinske procedurer in vivo og navigation gennem murbrokker i eksterne miljøer under eftersøgnings- og redningsoperationer af overlevende.
Inspireret af euglenoider, Krishna Manaswi Digumarti og kolleger ved Institut for Teknik og Matematik præsenterede design og udvikling af EuMoBot, en multi-segmenteret blød robot. Den biomimetiske robot kunne replikere store kropsdeformationer til bevægelse. I undersøgelsen, forskerne konstruerede to robotter i forskellige størrelser til at fungere med et konstant internt volumen. Den tekniske protokol gjorde brug af hyperelasticiteten af væskefyldte elastomere kamre til at replikere bevægelsen af euglenoider. Af de to, den mindre robot bevægede sig med en hastighed på 1/5 kropslængder pr. cyklus, mens den større robot bevægede sig med en hastighed på 1/10 kropslængder pr. cyklus. Undersøgelsen viste, hvordan bløde biomimetiske robotter kunne bruges til at ændre form og replikere biologisk bevægelse, mens de fungerer som et værktøj til at studere biomimetiske robotter.
Forskerne præsenterede også en kvantitativ metode baseret på elliptiske Fourier-deskriptorer til at karakterisere og sammenligne robottens form med dens biologiske euglenoide modstykke. Resultaterne viste 85 procent lighed i form, hvilket indikerer, at ingeniørteknikken var anvendelig til at udvikle miniaturerobotter. Metoden gjorde det muligt for forskerne at forstå udviklingen af form i ikke-lineær, dynamiske bløde robotter, der ikke havde en bestemt form at blive modelleret efter. Resultaterne af undersøgelsen er nu offentliggjort i Journal of the Royal Society Interface .
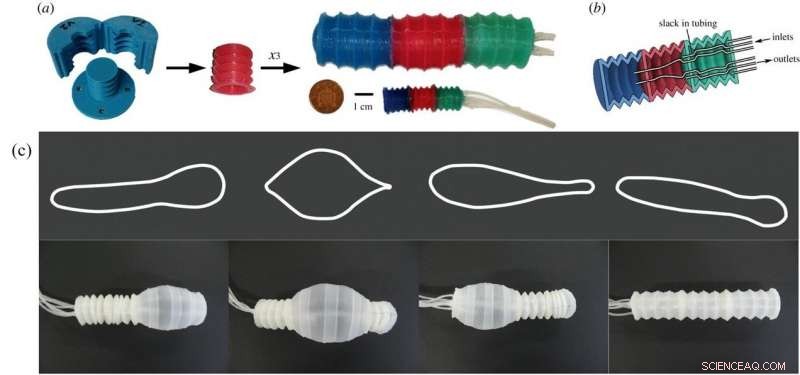
Fremstilling af multi-segment blød robot ved at sammenbinde tre HEB aktuatorer. a) Tredimensionel trykt form med to halvdele og en kerne, der bruges til at støbe silikoneelastomeren. Midten:et enkelt aktuatorkammer. Til højre:en tre-segment robot fremstillet i to forskellige skalaer. En engelsk krone vist i målestok. b) Tværsnitsbillede af robotten, der viser forskellige kamre. Hvert kammer blev forsynet med et ind- og udløbsrør. Tilstrækkelig slæk tilvejebragt til at tillade fri udvidelse af kamrene. c) Top:omrids af celleformer under euglenoid -bevægelse. Nederst:den fremstillede bløde robot, der kopierer den bioinspirerede euglenoide form. Kredit:RSIF, doi:10.1098/rsif.2018.0301.
Biomimetiske ingeniørstrategier har inspireret forskere til at søge design fra dyreriget og skabe biologisk inspirerede robotter. Euglenoider er encellede flagellater, grundigt studeret i laboratoriet som modeller på grund af deres plante- og dyrelignende karakter. Organismerne bruger unikke strategier til at svømme ved lave Reynolds-tal, og undersøgelser af deres bevægelse er relativt nye. Organismens celler er typisk udstyret med en eller flere flageller til at svømme, mens den også udviser en anden type langsommere bevægelse kaldet euglenoid bevægelse, hvor cellen gennemgår en dramatisk ændring i form. I nærværende undersøgelse, Digumarti et al. brugte den anden form for bevægelse til at konstruere en blød, funktionel robot baseret på mikroorganismens adfærd.
Den evolutionære årsag til den observerede ændring i form under euglenoid bevægelse er ukendt, selvom det menes, at deformation i cellestørrelse opstod som reaktion på stærke stimuli såsom lys, varme, kemisk stød eller kontakt. Da mikroorganismerne blev placeret i en væskefyldt mikroskopisk labyrint, der lignede deres naturlige miljø, mange viste euglenoid bevægelse, hvilket tyder på, at bevægelsen var velegnet til begrænsede miljøer. Bevægelse af denne art kan være nyttig for en bioinspireret robot inden for blød robotik at krydse gennem rodede miljøer ved hjælp af store kropsdeformationer.
I undersøgelsen, forfatterne præsenterede designet, aktiveringsprincip og fremstillingsmetode til ingeniør EuMoBot, en blød robot, der demonstrerer euglenoid bevægelse. Bevægelse gennem en væske blev kvantificeret i forhold til den naturlige mikroorganismes bevægelse. Da de underliggende mekanismer for formændring tidligere blev studeret i detaljer, Digumarti et al. fokuseret på den makroskopiske form af euglenoiden i robotform uden at replikere ændringer på mikroskopisk niveau. For at generere bløde fluidaktuatorer, forskerne designet en ny bælglignende enhed kaldet 'hyper-elastic bellows' (HEB) aktuator som tidligere beskrevet af den samme forskergruppe.

a) Demonstration af robot-compliance, når den udvider sig mellem stive skruer. b) Billedsekvens ved begyndelsen og slutningen af en bevægelsescyklus på et fladt bord. c) Robot, der klatrer ind i et rør ved hjælp af en gangart af tommer-orm. Kredit:RSIF, doi:10.1098/rsif.2018.0301.
Ingeniørerne dannede formen på aktuatoren ved hjælp af en 3-D printet form. De fremstillede to robotter i forskellige størrelser. De støbte tre aktuatorkamre, efterfulgt af elastomer blandet med pigmenter injiceret i formen for at hærde natten over og danne et gennemskinneligt hvidt kabinet. Den bioinspirerede bløde robot indeholdt et oppustnings-/tømningskammer for at kopiere euglenoidformen og opnå lighed i bevægelse.
For at teste bevægelse af de konstruerede robotter, forskerne anbragte dem i en tank fyldt med en opløsning af methylcellulose i vand. Robotterne i hvert eksperiment havde et konstant indre volumen, og deres indre væske flyttede fra det ene kammer til det næste, reproducerer bevægelsen af en ekspansionsbølge, der er karakteristisk for euglenoider. Begge robotter viste evne til at svømme ved at ændre formen på deres krop. Forskellen i hastighed afhang af mængden af væske pumpet gennem kamrene i den bløde robot. Forskerne observerede den hydrodynamiske lighed mellem den bløde robot og mikroorganismen i forhold til Reynold -tal i begge størrelser. Den bløde robot var ikke kun begrænset til at arbejde i et flydende miljø som dens biologiske modstykke, med kapacitet til multimodal bevægelse på et fladt bord og klatring på et rør ved hjælp af ikke-konstant driftsmængde.
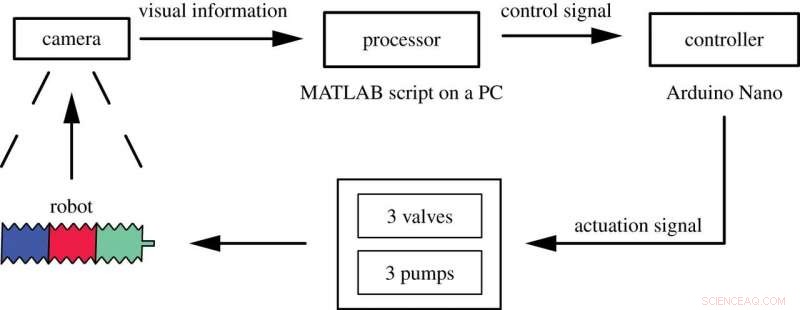
Skematisk visning af styrearkitekturen for den bløde robot. Et kamera bruges til at bestemme robotens aktuelle tilstand. Et MATLAB-script behandler denne information for at bestemme robottens aktuelle tilstand, som omfatter ekspansion og sammentrækning af hvert kammer. Den passerer derefter gennem de passende kontrolsignaler til en Arduino, som styrer driften af pumper og ventiler for at styre væskestrømmen inden i robotten. Kredit:RSIF, doi:10.1098/rsif.2018.0301.
Robotten anvender en feedback-baseret tilgang til autonom kontrol, fjerner behovet for at modellere pumpens dynamik og væskestrømmen i robotten. Et maskinsynsestimat af kammerstørrelse via et kamera og MATLAB-script gav feedback. Systemet brugte udvidelsen og sammentrækningen af hvert kammer til at kontrollere væskestrømmen inde i robotten. Sensorer i robotten tillod direkte målinger af væsketrykket.
Formestimering af robotten blev udført med matematiske deskriptorer ekstraheret ved hjælp af tidligere videooptagelser af organismen. Forskerne brugte den elliptiske Fourier-deskriptor til lukkede konturer til at beskrive formen af en hyperelastisk blød robot og sammenlignede den med en biologisk organisme for første gang i undersøgelsen. Den elliptiske Fourier-deskriptor blev ekstraheret i fire hovedtrin for at estimere objektets form. Mængden af varians i formen fanget af en egenvektor blev brugt til kvantitativt at måle ligheden i form mellem robotten og organismen. Euglenoidernes form var tydeligt karakteriseret ved de tre første hovedkomponenter, mens variansen i robotterne var spredt over flere komponenter, hvilket tyder på, at de ekstreme former for euglenoider ikke blev fuldt gengivet i robotterne.
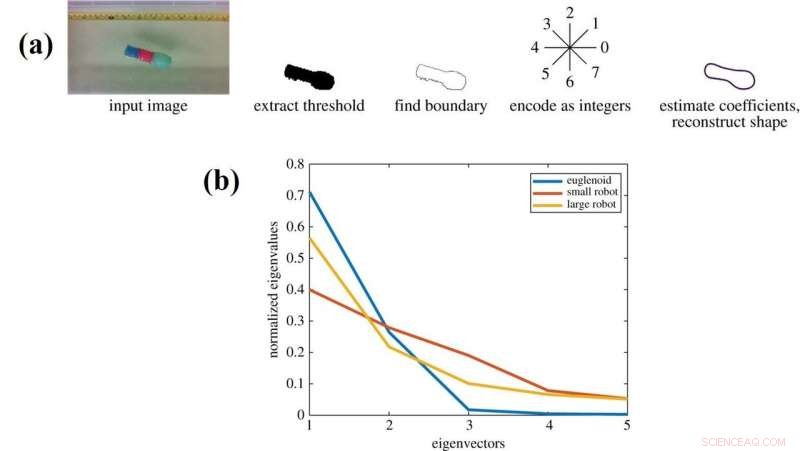
a) De fire stadier af formestimering. Først uddrages området af interesse fra billedet. Næste, grænsen er identificeret. Denne kontur kodes derefter som et sæt Freeman -heltal. Endelig, et sæt Fourier-koefficienter beregnes, og form rekonstrueret. b) Normaliserede egenværdier af de første fem egenvektorer, der beskriver formen af de bløde robotter sammenlignet med euglenoiden. Kredit:RSIF, doi:10.1098/rsif.2018.0301.
Baseret på egenværdierne, de større robotter reproducerede former tættere på euglenoiden sammenlignet med de mindre robotter. Årsagen til den observerede forskel kan skyldes udformningen af bælgenes folder (hyperelastiske bælge — HEB’er). Parametre for foldevinklerne, deres antal og tæthed kan optimeres yderligere for at opnå bedre formreplikation. Sammenlignet med naturlige mikroorganismer, robotten producerede ikke et glat skift ved overgang af væske fra et kammer til et andet, potentielt da den syntetiske grænsevæg på trods af dens elasticitet lokalt kan begrænse kammerudvidelsen. Dette kan også forklare robottens manglende evne til at antage ekstreme former.
Som en helhed, multi-segment bløde robotten EuMoBot kan replikere euglenoid bevægelse ud over at svømme med formændring og bevægelse i ikke-flydende miljøer, giver den bløde og selvtilfredse robot mulighed for at arbejde i trange rum. Yderligere arbejde er påkrævet for at forstå forholdet mellem hovedkomponenter og bevægelsesevne. Det yderste af former udstillet af EuMoBots var begrænset på grund af trækstyrken af tilhørende materiale og dets monolitiske enhedsdesign. Alternative fremstillingsteknikker såsom 3-D-print og blød litografi kunne adressere grænserne for materialets elasticitet. Robotterne kunne også konstrueres til at ligne euglenoider med matematisk nøjagtighed ved at replikere den mikroskopiske pellikelstruktur, der er iboende for organismen, for en jævnere overgang under bevægelse. Evnen til at styre kan inkluderes i robotens design med aktiverede spoler af formhukommelseslegering eller ved hjælp af begrænsninger på materialet med internaliserede strømkilder til modstandsdygtige, miniaturiserede enheder i fremtidigt arbejde.
© 2018 Science X Network
 Varme artikler
Varme artikler
-
 Hvordan mennesker passer ind i Googles maskinfremtidVil folk bruge teknologi, eller vil det bruge os? Kredit:Zapp2Photo/Shutterstock.com I 1998, Google begyndte ydmygt, formelt indbygget i en Menlo Park garage, levere søgeresultater fra en server,
Hvordan mennesker passer ind i Googles maskinfremtidVil folk bruge teknologi, eller vil det bruge os? Kredit:Zapp2Photo/Shutterstock.com I 1998, Google begyndte ydmygt, formelt indbygget i en Menlo Park garage, levere søgeresultater fra en server, -
 BMW -overskuddet falder i flygtige tiderBMW udsendte en sjælden overskudsadvarsel i september, da den blev tvunget til at sænke helårsudsigterne i lyset af en række tilbageslag Den tyske high-end bilproducent BMW havde onsdag et kraftig
BMW -overskuddet falder i flygtige tiderBMW udsendte en sjælden overskudsadvarsel i september, da den blev tvunget til at sænke helårsudsigterne i lyset af en række tilbageslag Den tyske high-end bilproducent BMW havde onsdag et kraftig -
 Steder til at finde Skrot MetalSkrot metal er rundt omkring os på forskellige steder fra garager til junk yards. Hvis du ser hårdt nok ud, kan du finde nok skrot til enten at bruge til projekter eller at sælge til en metalforhandle
Steder til at finde Skrot MetalSkrot metal er rundt omkring os på forskellige steder fra garager til junk yards. Hvis du ser hårdt nok ud, kan du finde nok skrot til enten at bruge til projekter eller at sælge til en metalforhandle -
 Kontrol af lys med lys:Forskere udvikler en ny platform til altoptisk computingSEAS-forskere har udviklet en ny platform til altoptisk computing, hvilket betyder beregninger udelukkende udført med lysstråler. Kredit:Harvard John A. Paulson School of Engineering and Applied Scien
Kontrol af lys med lys:Forskere udvikler en ny platform til altoptisk computingSEAS-forskere har udviklet en ny platform til altoptisk computing, hvilket betyder beregninger udelukkende udført med lysstråler. Kredit:Harvard John A. Paulson School of Engineering and Applied Scien
- Konvergent udvikling:Når en god idé bevæger sig mellem arter
- Ti år med mere sikker himmel med Europas andre satellitnavigationssystem
- At investere i ren energi giver økonomisk mening, siger eksperter
- Molekylær mekanisme for ruthenium-kompleks-induceret DNA-faseseparation afsløret
- NASAs Webb-teleskop pakket ind i et mobilt rent rum
- NASA får et sidste kig på Tropical Depression Enawos sidste bue