


En ny tilgang til design og implementering af et hybrid systemsprog
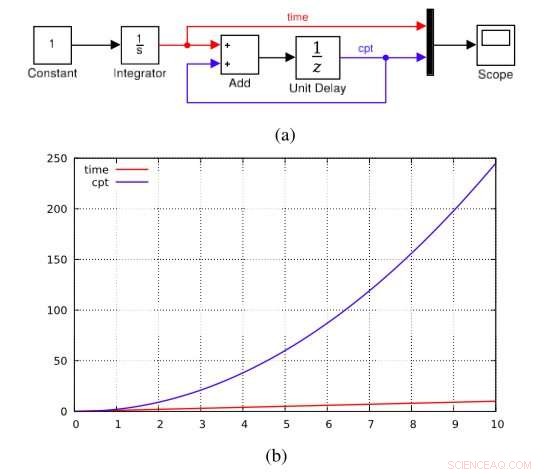
Sammensætning af modeller, der blander diskrete- og kontinuerlige tidsblokke i Simulink (R2016b). (a) Grundmodel. (b) Simulering af grundmodel. Kredit:Benveniste et al.
Hybridsystemer er systemer, der udviser både kontinuerlig og diskret dynamisk adfærd, tillader mere fleksibilitet i modellering af dynamiske fænomener. Hybridsystemers modelleringssprog bruges i vid udstrækning til udvikling af cyberfysiske systemer, hvor kontrolsoftware interagerer med fysiske enheder.
Forskere ved Inria og ANSYS/Esterel Technologies har for nylig præsenteret en ny tilgang til at designe og implementere hybride systemsprog. Deres metode, skitseret i et papir i Proceduren for IEEE , er baseret på synkrone sprogprincipper og tilhørende kompileringsteknikker.
Hybride systemmodelleringsværktøjer har udviklet sig fra blot at være grænseflader til numeriske løsere, blev derefter fuldgyldige sprog til programmering af eksekverbare modeller af dynamiske systemer. Disse modeller er generelt simulerede, testet, debugged og verificeret på forskellige stadier af deres udviklingskæde.
I state-of-the-art metoder, kompilatorer tjekker typisk kildemodeller, producere mellemrepræsentationer og generere sekventiel kode til enten effektiv simulering eller eksekvering på målplatforme. Imidlertid, disse kompileringstrin er ofte svære at designe og implementere.
Den nylige undersøgelse fokuserede på designet, semantik og implementering af hybridsystemers modelleringssprog. Det er baseret på den antagelse, at sådanne sprog er programmeringssprog med hybridsystemsemantik, giver derfor en række nye udfordringer.
"Konklusionen er, at kompleksiteten af egentlige hybridsystemers modelleringssprog gør definitionen af en omfattende formel statisk og dynamisk semantik vanskelig at opnå, " skriver forskerne i deres papir. "Langt fra at være abstrakte filosofiske bekymringer, disse vanskeligheder har praktiske konsekvenser."
For at løse disse udfordringer, forskerne satte sig for at identificere en minimal sprogkerne af ortogonale programmeringskonstruktioner, der er udtryksfulde nok til at skrive realistiske hybridmodeller. De ønskede også at definere detaljeret statisk og dynamisk semantik af dette sprog, samt dets kompileringstrin.
"Resultatet er et hybridsystemmodelleringssprog, hvor synkrone programmeringskonstruktioner kan blandes med almindelige differentialligninger (ODE'er) og nulkrydsningshændelser, og en kørselstid, der uddelegerer deres tilnærmelse til en standard numerisk løser, "forklarer forskerne i deres papir." Vi foreslår en ideel semantik baseret på ikke -standardiseret analyse, som definerer udførelsen af en hybridmodel som en uendelig sekvens af uendeligt små tidstrin."
Den semantiske ramme foreslået af forskerne kan bruges til at specificere og bevise tre væsentlige kompileringstrin. Først, det fører til et typesystem, der garanterer, at et kontinuerligt tidssignal aldrig bruges i situationer, hvor et tidsdiskret signal forventes, og omvendt. Ud over, det sikrer fraværet af kombinatoriske loops, samt generering af statisk planlagt kode for effektiv eksekvering.
"Vores tilgang er blevet evalueret i to implementeringer:det akademiske sprog Zélus, som udvider et sprog, der minder om Luster med Odes og nul-krydsende begivenheder, og den industrielle prototype Scade Hybrid, en konservativ udvidelse af Scade 6, "skriver forskerne i deres papir.
Sammenlignet med andre værktøjer og sprog, såsom Ptolemæus, den tilgang, som forskerne bruger, favoriserer påvisning af usikre modeller på kompileringstidspunktet. Konsekvensen af dette er, at nogle gode modeller bliver forkastet, hovedsagelig fordi de resulterende typesystemer ikke er udtryksfulde nok. Yderligere eksperimentelle undersøgelser kan hjælpe med at afgøre, om disse type systemer er alt for begrænsende.
"Opdagelsen af numeriske vanskeligheder er relateret til stivhed forbliver køretid, og udelukker behovet for overdrevent restriktive programmeringsdiscipliner i industrielle sammenhænge, " skriver forskerne i deres papir. "Udførelse af omfattende analyser på kompileringstidspunktet, mens de begrænser brugerne, kan opdage fejl i modeller tidligt; det giver også mulighed for at fjerne kørselskontroller og statisk planlægge beregningen af trinfunktionen og nulstillingshandlingerne, hvilket fører til mere effektiv kode."
© 2018 Science X Network
Sidste artikelEn ny måde at give køling uden strøm
Næste artikelEuMoBot:Replikering af euglenoid -bevægelse i en blød robot
 Varme artikler
Varme artikler
-
 Forskere forvandler plastikvandflasker til proteserKredit:CC0 Public Domain Kunstige lemmer lavet af plastikvandflasker kan spare sundhedsudbydere for millioner af pund og hjælpe med at tackle forurening på samme tid. En ekspert ved De Montfort U
Forskere forvandler plastikvandflasker til proteserKredit:CC0 Public Domain Kunstige lemmer lavet af plastikvandflasker kan spare sundhedsudbydere for millioner af pund og hjælpe med at tackle forurening på samme tid. En ekspert ved De Montfort U -
 Ny algoritme kan hjælpe folk med at gemme flere billeder, dele videoer hurtigereBrug af kunstig intelligens, et Penn State IST-ledet team designede et system, der kunne komprimere og gendanne filer, såsom billeder. Ofte er der et kvalitetstab, når billeder gendannes. Imidlertid,
Ny algoritme kan hjælpe folk med at gemme flere billeder, dele videoer hurtigereBrug af kunstig intelligens, et Penn State IST-ledet team designede et system, der kunne komprimere og gendanne filer, såsom billeder. Ofte er der et kvalitetstab, når billeder gendannes. Imidlertid, -
 Tysklands Bosch tænder brintceller til bilerBrinttankstationer er stadig sjældne i Tyskland Verdens største producent af bildele Bosch sagde mandag, at den ville samarbejde med et svensk firma om at udvikle nøglekomponenter til brintbrændse
Tysklands Bosch tænder brintceller til bilerBrinttankstationer er stadig sjældne i Tyskland Verdens største producent af bildele Bosch sagde mandag, at den ville samarbejde med et svensk firma om at udvikle nøglekomponenter til brintbrændse -
 Google bøjer sig for medarbejdernes pres på politikken for seksuel forseelseI denne 8. maj, 2018, fil foto, Google CEO Sundar Pichai taler på Google I/O -konferencen i Mountain View, Californien. Google lover at være mere kraftfuld og åben over for håndteringen af sager om
Google bøjer sig for medarbejdernes pres på politikken for seksuel forseelseI denne 8. maj, 2018, fil foto, Google CEO Sundar Pichai taler på Google I/O -konferencen i Mountain View, Californien. Google lover at være mere kraftfuld og åben over for håndteringen af sager om
- Hvad kan forårsage en ændring i hastighed?
- Undersøgelser bekræfter udbredt læse- og skrivefærdigheder i Judas kongerige i bibelperioden
- Forskere udnytter DNA som motoren i en supereffektiv nanomaskine
- Hvordan regeringer og virksomheder bør lytte til befolkningen om klimaændringer
- Junkers Ju 87 Stuka
- Historien bag en unik mørk vådbundsjord