


Ambidextrous robotter kunne dramatisk fremskynde e-handel

En ny "ambidextrous" tilgang tillader robotter at gribe en bred vifte af objekter uden træning. Kredit:Adriel Olmos
E-handel fortsætter med at udvide og nåede nye niveauer i løbet af den seneste feriesæson. For hurtigt at opfylde den enorme mængde og mangfoldighed af ordrer, virksomheder som Amazon, Walmart, og Alibaba investerer massivt i nye varehuse. For at afhjælpe manglen på arbejdskraft, mange virksomheder overvejer robotter. Imidlertid, pålideligt at forstå en bred vifte af produkter er fortsat en stor udfordring for robotteknologi.
I en avis offentliggjort onsdag, 16. januar, i Videnskab robotik , ingeniører ved University of California, Berkeley præsenterer en roman, "ambidekstrus" tilgang til at forstå en bred vifte af objektformer uden træning.
"Enhver enkelt griber kan ikke håndtere alle genstande, " sagde Jeff Mahler, en postdoc-forsker ved UC Berkeley og hovedforfatter af papiret. "For eksempel, en sugekop kan ikke skabe en forsegling på porøse genstande såsom tøj, og gribere med parallelle kæber kan muligvis ikke nå begge sider af noget værktøj og legetøj."
Mahler arbejder i Ken Goldbergs laboratorium, en UC Berkeley professor med fælles ansættelser i Institut for Elektroteknik og Datalogi og Institut for Industriel Teknik og Driftsforskning.
De robotsystemer, der bruges i de fleste e-handelscentre, er afhængige af sugegribere, som kan begrænse rækken af objekter, de kan gribe. UC Berkeley-papiret introducerer en "ambidekstrus" tilgang, der er kompatibel med en række forskellige gribetyper. Tilgangen er baseret på en fælles "belønningsfunktion" for hver gribertype, der kvantificerer sandsynligheden for, at hver griber vil lykkes. Dette gør det muligt for systemet hurtigt at beslutte, hvilken griber der skal bruges til hver situation. For effektivt at beregne en belønningsfunktion for hver gribertype, papiret beskriver en proces til at lære belønningsfunktioner ved at træne på store syntetiske datasæt, der hurtigt genereres ved hjælp af struktureret domænerandomisering og analytiske modeller af sensorer og hver enkelt griberens fysik og geometri.
Da forskerne trænede belønningsfunktioner til en parallel-kæbe-griber og en sugekop-griber på en to-armet robot, de fandt ud af, at deres system ryddede skraldespande med op til 25 tidligere usete objekter med en hastighed på over 300 pluk i timen med 95 procent pålidelighed.
"Når du er på et lager og sammensætter pakker til levering, genstande varierer betydeligt, " sagde Goldberg. "Vi har brug for en række forskellige gribere til at håndtere en række genstande."
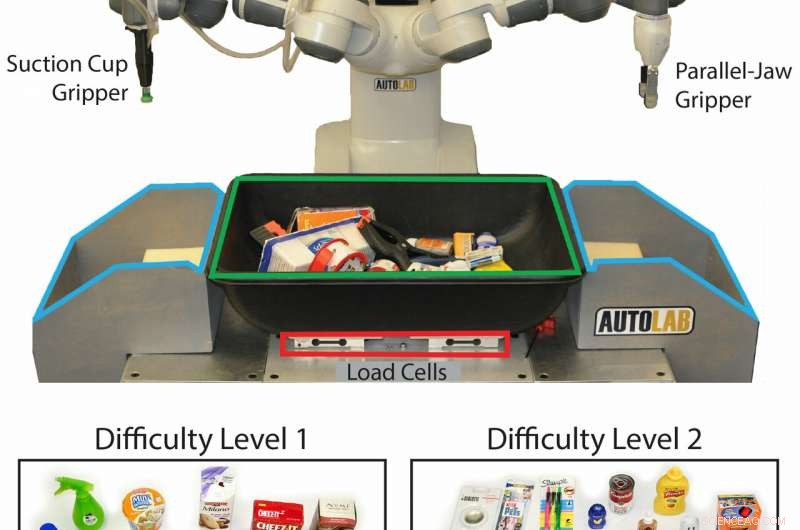
Opsætning af den to-armede ambidextrous robot og de objekter, som den forsøgte at gribe, kategoriseret i to sværhedsgrader. Kredit:Mahler et al., Sci. Robot. 4, eaau4984 (2019)
 Varme artikler
Varme artikler
-
 Toyotas magnet sænker afhængigheden af meget udbredt sjældent jordelementKredit:Toyota Nyheder fra Toyota:Tirsdag annoncerede bilmarkøren, at den har en varmebestandig magnet, der bruger betydeligt mindre neodym, et sjældent jordelement-reducerer mængden af neodymfor
Toyotas magnet sænker afhængigheden af meget udbredt sjældent jordelementKredit:Toyota Nyheder fra Toyota:Tirsdag annoncerede bilmarkøren, at den har en varmebestandig magnet, der bruger betydeligt mindre neodym, et sjældent jordelement-reducerer mængden af neodymfor -
 Sejler mod en fuldt elektrisk færgeKredit:E-færge Den danske ø Ærø, beliggende i Østersøen, er en af de få øer, der ikke er forbundet til fastlandet med en bro. Som resultat, det er afhængigt af bilfærger. Aeroe har også en anden
Sejler mod en fuldt elektrisk færgeKredit:E-færge Den danske ø Ærø, beliggende i Østersøen, er en af de få øer, der ikke er forbundet til fastlandet med en bro. Som resultat, det er afhængigt af bilfærger. Aeroe har også en anden -
 Nepals lov om sociale medier vækker bekymringer om ytringsfrihedSociale netværkssider som Facebook og Twitter har millioner af brugere i Nepal, hvis befolkning på omkring 30 millioner har en internetpenetration på omkring 57 procent Nepals regering fremlagde o
Nepals lov om sociale medier vækker bekymringer om ytringsfrihedSociale netværkssider som Facebook og Twitter har millioner af brugere i Nepal, hvis befolkning på omkring 30 millioner har en internetpenetration på omkring 57 procent Nepals regering fremlagde o -
 Kan kunstig intelligens forhindre det næste Parkland-skyderi?Kredit:CC0 Public Domain Skoler henvender sig i stigende grad til kunstig intelligens-støttede løsninger for at stoppe tragiske voldshandlinger af studerende, såsom skyderiet på Marjory Stoneman D
Kan kunstig intelligens forhindre det næste Parkland-skyderi?Kredit:CC0 Public Domain Skoler henvender sig i stigende grad til kunstig intelligens-støttede løsninger for at stoppe tragiske voldshandlinger af studerende, såsom skyderiet på Marjory Stoneman D
- Thermal Expansion Science Experiments for Kids
- Hvad kaldes clusters of Cell Bodies?
- Siliciumalternativer nøglen til fremtidige computere, forbrugerelektronik
- Hvad er strengteori?
- Kunstig intelligens kan transformere industrier, men lovgiverne i Californien er bekymrede for priva…
- Skovbevaringsmetoder skal anerkende lokalbefolkningens rettigheder