


Sådan træner du din robot (til at fodre dig aftensmad)

Forskere ved University of Washington har udviklet et robotsystem, der kan fodre folk, der har brug for nogen til at hjælpe dem med at spise. Her, en frivillig demonstrerer, hvordan systemet fungerer. Kredit:Eric Johnson/University of Washington
Omkring 1 million voksne i USA har brug for nogen til at hjælpe dem med at spise, ifølge folketællingsdata fra 2010. Det er en tidskrævende og ofte akavet opgave, et stort set gjort af nødvendighed frem for valg.
Forskere ved University of Washington arbejder på et robotsystem, der kan være med til at gøre det nemmere. Efter at have identificeret forskellige fødevarer på en tallerken, robotten kan planlægge, hvordan man bruger en gaffel til at samle op og levere den ønskede bid til en persons mund.
Holdet offentliggjorde sine resultater i en række artikler:En blev for nylig offentliggjort i IEEE Robotics and Automation Letters , mens den anden vil blive præsenteret 13. marts på ACM/IEEE International Conference on Human-Robot Interaction i Sydkorea.
"At være afhængig af en omsorgsperson til at fodre hver bid hver dag fjerner en persons følelse af uafhængighed, " sagde den tilsvarende forfatter Siddhartha Srinivasa, Boeing-begavet professor ved UW's Paul G. Allen School of Computer Science &Engineering. "Vores mål med dette projekt er at give folk lidt mere kontrol over deres liv."
Idéen var at udvikle et autonomt fodringssystem, der skulle sættes fast på folks kørestole og fodre folk, hvad end de ville spise.
"Da vi startede projektet indså vi:Der er så mange måder, hvorpå folk kan spise et stykke mad afhængigt af dets størrelse, form eller konsistens. Hvordan starter vi?" sagde medforfatter Tapomayukh Bhattacharjee, en postdoc-forsker ved Allen-skolen. "Så vi satte et eksperiment op for at se, hvordan mennesker spiser almindelige fødevarer som vindruer og gulerødder."
Forskerne arrangerede tallerkener med omkring et dusin forskellige slags mad, lige i konsistensen fra hårde gulerødder til bløde bananer. Tallerkenerne omfattede også fødevarer som tomater og vindruer, som har en hård hud og blød inderside. Derefter gav holdet frivillige en gaffel og bad dem samle forskellige stykker mad op og fodre dem til en mannequin. Gaffelen indeholdt en sensor til at måle, hvor meget kraft folk brugte, når de hentede mad.
De frivillige brugte forskellige strategier til at hente mad med forskellige konsistenser. For eksempel, folk smed bløde genstande som bananer i en vinkel for at forhindre dem i at glide af gaflen. Til ting som gulerødder og vindruer, de frivillige havde en tendens til at bruge vrikkende bevægelser for at øge kraften og spyd hver bid.
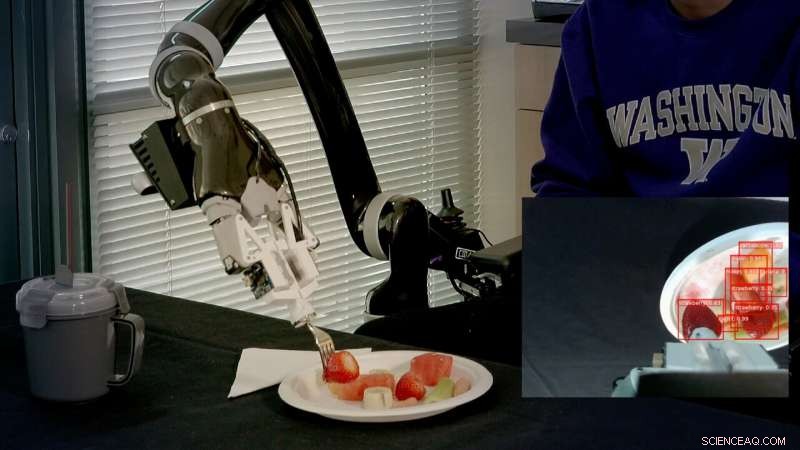
Objektdetektionsalgoritmen, kaldet RetinaNet, scanner pladen, identificerer typerne af mad på den og placerer en ramme rundt om hvert emne. Kredit:Eric Johnson/University of Washington
"Folk så ud til at bruge forskellige strategier, ikke kun baseret på størrelsen og formen af maden, men også hvor hårdt eller blødt det er. Men skal vi faktisk gøre det?" sagde Bhattacharjee. "Vi besluttede at lave et eksperiment med robotten, hvor vi fik den til at spyd, indtil gaflen nåede en vis dybde indeni, uanset typen af mad."
Robotten brugte den samme kraft-og-spyd-strategi til at prøve at samle alle stykkerne mad op, uanset deres konsistens. Den var i stand til at opsamle hård mad, men den kæmpede med blød mad og dem med hård hud og blødt indre. Så robotter, som mennesker, skal justere, hvor meget kraft og vinkel de bruger til at opsamle forskellige slags mad.
Holdet bemærkede også, at handlingerne med at samle et stykke mad op og give det til nogen ikke er uafhængige af hinanden. Frivillige ville ofte specifikt orientere et stykke mad på gaflen, så det nemt kunne spises.
"Du kan tage en gulerodspind op ved at stikke den i midten af pinden, men det vil være svært for en person at spise, " sagde Bhattacharjee. "På den anden side, hvis du tager den op i en af enderne og så vipper guleroden mod en andens mund, det er nemmere at tage en bid."
At designe en spyd- og fodringsstrategi, der ændrer sig baseret på fødevaren, forskerne kombinerede to forskellige algoritmer. Først brugte de en objektdetektionsalgoritme kaldet RetinaNet, som scanner pladen, identificerer typerne af mad på den og placerer en ramme rundt om hvert emne.
Så udviklede de SPNet, en algoritme, der undersøger typen af mad i en bestemt ramme og fortæller robotten den bedste måde at samle maden op. For eksempel, SPNet beder robotten om at stikke et jordbær eller en skive banan i midten, og spyd gulerødder i den ene af de to ender.
Holdet fik robotten til at samle stykker mad op og fodre dem til frivillige ved hjælp af SPNet eller en mere ensartet strategi:en tilgang, der skød midten af hver madvare, uanset hvad det var. SPNets forskellige strategier udkonkurrerede eller udførte det samme som den ensartede tilgang til al maden.
"Mange tekniske udfordringer er ikke kræsne med hensyn til deres løsninger, men denne forskning er meget tæt forbundet med mennesker, " sagde Srinivasa. "Hvis vi ikke tager højde for, hvor let det er for en person at tage en bid, så kan folk måske ikke bruge vores system. Der er et univers af typer mad derude, så vores største udfordring er at udvikle strategier, der kan håndtere dem alle."
Teamet arbejder i øjeblikket med Taskar Center for Tilgængelig Teknologi for at få feedback fra plejere og patienter i plejehjem om, hvordan man kan forbedre systemet, så det matcher folks behov.
"I sidste ende er vores mål, at vores robot hjælper folk med at spise deres frokost eller aftensmad på egen hånd, " sagde Srinivasa. "Men pointen er ikke at erstatte omsorgspersoner:Vi ønsker at styrke dem. Med en robot til at hjælpe, plejeren kan sætte pladen op, og så gør noget andet, mens personen spiser."
 Varme artikler
Varme artikler
-
 Top MEP siger, at Zuckerberg skal møde Europa-ParlamentetFacebooks grundlægger Mark Zuckerberg skal på tirsdag blive afhørt på den amerikanske kongres over påstande om misbrug af data Facebook-chef Mark Zuckerberg må komme til Europa-Parlamentet for at
Top MEP siger, at Zuckerberg skal møde Europa-ParlamentetFacebooks grundlægger Mark Zuckerberg skal på tirsdag blive afhørt på den amerikanske kongres over påstande om misbrug af data Facebook-chef Mark Zuckerberg må komme til Europa-Parlamentet for at -
 Elektronisk handske tilbyder menneskelignende funktioner til brugere af håndproteserEn elektronisk handske, udviklet af forskere fra Purdue University, tilbyder menneskelige funktioner til brugere af håndproteser. Kredit:Purdue University/Chris Adam Mennesker med håndamputationer
Elektronisk handske tilbyder menneskelignende funktioner til brugere af håndproteserEn elektronisk handske, udviklet af forskere fra Purdue University, tilbyder menneskelige funktioner til brugere af håndproteser. Kredit:Purdue University/Chris Adam Mennesker med håndamputationer -
 Nyt værktøj giver forskere et bedre kig på anonyme online markedspladserKredit:CC0 Public Domain Når du læser dette, kokain, dusører, og andre ulovlige produkter og tjenester bliver købt og solgt på snesevis af anonyme online markedspladser. Disse markedspladser er sv
Nyt værktøj giver forskere et bedre kig på anonyme online markedspladserKredit:CC0 Public Domain Når du læser dette, kokain, dusører, og andre ulovlige produkter og tjenester bliver købt og solgt på snesevis af anonyme online markedspladser. Disse markedspladser er sv -
 Nyt batterikoncept baseret på fluoridioner kan forlænge batteriets levetidStillbillede, der viser koordinationsmiljøet for F-ionen i den flydende elektrolyt, stabiliseret af BTFE -molekyler. Kredit:Dr. Brett Savoie – Caltech/Perdue Forestil dig ikke at skulle oplade din
Nyt batterikoncept baseret på fluoridioner kan forlænge batteriets levetidStillbillede, der viser koordinationsmiljøet for F-ionen i den flydende elektrolyt, stabiliseret af BTFE -molekyler. Kredit:Dr. Brett Savoie – Caltech/Perdue Forestil dig ikke at skulle oplade din
- Forskere observerer gravitationsanomali på Jorden
- Eksperiment tyder på, at silicium mangler element i Jordens kerne
- Mineralogi på Mars peger på et koldt og iskoldt oldtidsklima
- Forskere opdager en unik orbital tekstur i enkeltlag af 3-D materiale
- Indfangning af fremmede kometer:Simulerer slyngellegemer på deres rejse gennem solsystemet
- Bærbar sundhedsteknologi får effektivitetsopgradering