


Mikrorobotter, der kan formes til flere typer sværmende former
Et team af forskere fra Harbin Institute of Technology i Kina og Michigan State University i USA har udviklet en måde at kontrollere sværmende mikrorobotter, der er i stand til at formes til flere typer former. I deres papir offentliggjort i tidsskriftet Videnskab robotik , gruppen beskriver deres små robotter, hvad de kan, og mulige anvendelser for dem.
I løbet af de sidste mange årtier, videnskabsmænd og ingeniører har arbejdet på udviklingen af robotter, der er så små, at de kan svømme inde i en levende krop. Det menes, at en dag, sådanne robotter vil være i stand til at levere medicin til mål i kroppen, eller måske blive i kroppen, arbejder sammen med immunsystemet for at forebygge sygdomme. I denne nye indsats, forskerne har taget endnu et skridt i den retning ved at udvikle en måde at styre en sværm af bittesmå robotter, der konfigurerer dem til flere typer former.
Forskerne bemærker, at indtil nu, ingeniører har udviklet bittesmå robotter, der danner og opererer i sværme, men kun i en enkelt form - hvilket begrænser deres anvendelighed. Forskerne, der arbejder i Kina, rapporterer, at deres bittesmå robotter var i stand til at formes til fire forskellige sværmformer - flydende, bånd, kæde og hvirvel. Og enhver af dem kunne dannes på efterspørgsel.
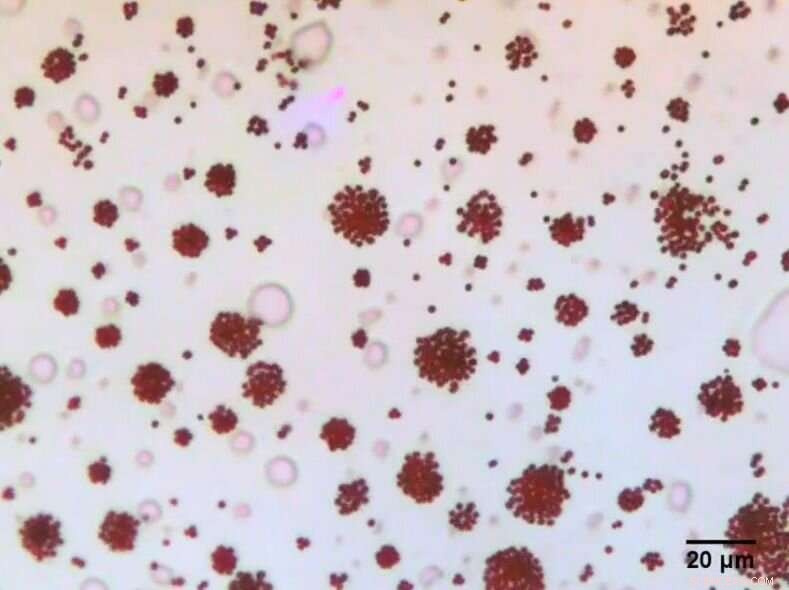
Robotterne i eksperimenterne var faktisk kun enkelte korn af hæmatit - de blev suspenderet i en væske og manipuleret ved hjælp af specialiserede magneter. Ved at styre frekvensen og retningen af det magnetiske felt, forskerne var i stand til at få hver robot til at dreje, rulle, svinge og tumle uafhængigt. Da magnetfeltet blev styret for en hel gruppe af robotterne, resultatet var en kontrollerbar sværm.
Forskerne påpeger, at for at komme fra en kropsdel til en anden, en sværm ville være i stand til at forme sig selv i forskellige konfigurationer. At bevæge sig gennem et organ som maven, for eksempel, kan kræve en sværm blot for at bevæge sig som en masse. At bevæge sig gennem en kanal, på den anden side, ville kræve former som en kæde, slange eller orm. Og flytning af last inde i karosseriet ville kræve en sværm at binde sammen i en form som en hvirvel for et kollektivt lastrum.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Forskere skaber spilleregenskabsmodel, der giver mulighed for personlige spilKredit:CC0 Public Domain University of Waterloo forskere har udviklet et nyt værktøj, der vil gøre det muligt for designere af brugeroplevelser at skabe mere effektive, personlige spil og marketin
Forskere skaber spilleregenskabsmodel, der giver mulighed for personlige spilKredit:CC0 Public Domain University of Waterloo forskere har udviklet et nyt værktøj, der vil gøre det muligt for designere af brugeroplevelser at skabe mere effektive, personlige spil og marketin -
 Mindst 57 negative virkninger fra cyberangrebKredit:CC0 Public Domain Cybersikkerhedsforskere har identificeret i alt mindst 57 forskellige måder, hvorpå cyberangreb kan have en negativ indvirkning på enkeltpersoner, virksomheder og endda na
Mindst 57 negative virkninger fra cyberangrebKredit:CC0 Public Domain Cybersikkerhedsforskere har identificeret i alt mindst 57 forskellige måder, hvorpå cyberangreb kan have en negativ indvirkning på enkeltpersoner, virksomheder og endda na -
 De fleste amerikanere får nyheder fra sociale medier, trods tvivl:undersøgelseEn ny undersøgelse, der viser, at de fleste amerikanske voksne får i det mindste nogle nyheder fra sociale medier, kommer med de sociale netværk under større kontrol over misinformation og manipulatio
De fleste amerikanere får nyheder fra sociale medier, trods tvivl:undersøgelseEn ny undersøgelse, der viser, at de fleste amerikanske voksne får i det mindste nogle nyheder fra sociale medier, kommer med de sociale netværk under større kontrol over misinformation og manipulatio -
 Algoritme designer optimerede maskinlæringsmodeller op til 200 gange hurtigere end traditionelle me…MIT-forskere har udviklet en effektiv algoritme, der kunne give en trykknap-løsning til automatisk at designe hurtigtkørende neurale netværk på specifik hardware. Kredit:Chelsea Turner, MIT Et nyt
Algoritme designer optimerede maskinlæringsmodeller op til 200 gange hurtigere end traditionelle me…MIT-forskere har udviklet en effektiv algoritme, der kunne give en trykknap-løsning til automatisk at designe hurtigtkørende neurale netværk på specifik hardware. Kredit:Chelsea Turner, MIT Et nyt
- Byens kolde øer driver planteudviklingen i byerne
- Fysikeren peger på måde at kontrollere elasticiteten med magnetisme
- Hvorfor indeholder testene en masse glat ER?
- Planeten falder ikke langt fra stjernen
- Mississippi-flod-omlægninger:drev landvinding eller jordtab?
- Hvor meget fluor er for meget fluor?