


Ny, mere realistisk simulator vil forbedre selvkørende køretøjssikkerhed før vejtest
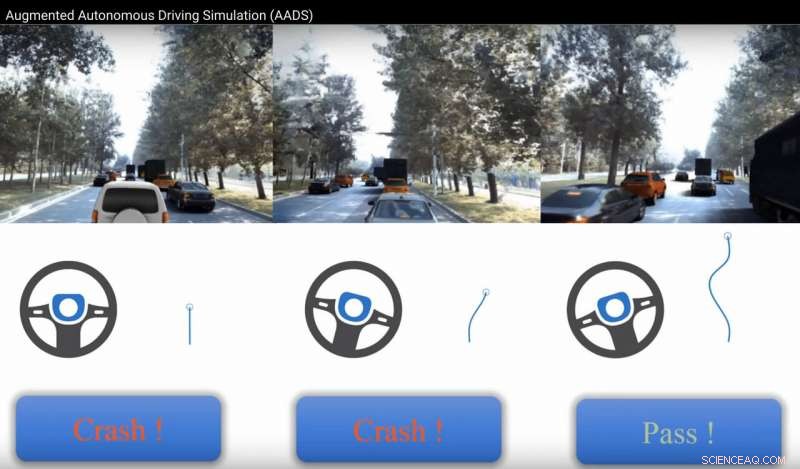
Systemet Augmented Autonomous Driving Simulation (AADS) kombinerer fotos, videoer, og lidar-punktskyer til realistisk scenegengivelse med virkelige banedata, der kan bruges til at forudsige kørselsadfærd og fremtidige positioner for andre køretøjer eller fodgængere på vejen. Kredit:Li et. Al, 2019
Computer science ved University of Maryland Dinesh Manocha, i samarbejde med et team af kolleger fra Baidu Research og University of Hong Kong, har udviklet et fotorealistisk simuleringssystem til træning og validering af selvkørende biler. Det nye system giver en rigere, mere autentisk simulering end nuværende systemer, der bruger spilmotorer eller high-fidelity computergrafik og matematisk gengivet trafikmønstre.
Deres system, kaldet Augmented Autonomous Driving Simulation (AADS), kunne gøre selvkørende teknologi lettere at evaluere i laboratoriet og samtidig sikre en mere pålidelig sikkerhed, inden dyre vejtest begynder.
Forskerne beskrev deres metode i et forskningsartikel, der blev offentliggjort den 27. marts, 2019 i journalen Science Robotics .
"Dette arbejde repræsenterer et nyt simuleringsparadigme, hvor vi kan teste pålideligheden og sikkerheden ved automatisk kørselsteknologi, før vi implementerer det på rigtige biler og tester det på motorveje eller byveje, "sagde Manocha, en af papirets tilsvarende forfattere, og en professor med fælles ansættelser i datalogi, el- og computerteknik, og University of Maryland Institute for Advanced Computer Studies.
En potentiel fordel ved selvkørende biler er, at de kan være sikrere end menneskelige chauffører, der er tilbøjelige til at blive distraheret, træthed og følelsesmæssige beslutninger, der fører til fejl. Men for at sikre sikkerheden, autonome køretøjer skal evaluere og reagere på førermiljøet uden fejl. I betragtning af de utallige situationer, som en bil kan støde på på vejen, et autonomt kørselssystem kræver testkørsel til hundredvis af millioner kilometer under udfordrende forhold for at demonstrere pålidelighed.
Selvom det kan tage årtier at opnå på vejen, foreløbige evalueringer kunne foretages hurtigt, mere effektivt og mere sikkert ved computersimuleringer, der præcist repræsenterer den virkelige verden og modellerer adfærden for omgivende objekter. Nuværende state-of-the-art simuleringssystemer, der er beskrevet i videnskabelig litteratur, mangler ved at skildre fotorealistiske miljøer og præsentere virkelige trafikstrømningsmønstre eller føreradfærd.
AADS er et datadrevet system, der mere præcist repræsenterer de input, en selvkørende bil ville modtage på vejen. Selvkørende biler er afhængige af et opfattelsesmodul, som modtager og fortolker oplysninger om den virkelige verden, og et navigationsmodul, der træffer beslutninger, såsom hvor man skal styre, eller om man skal bryde eller accelerere, baseret på opfattelsesmodulet.
I den virkelige verden, opfattelsesmodulet i en selvkørende bil modtager typisk input fra kameraer og lidarsensorer, som bruger lyspulser til at måle afstande fra omgivelserne. I den nuværende simulatorteknologi, opfattelsesmodulet modtager input fra computergenererede billeder og matematisk modellerede bevægelsesmønstre for fodgængere, cykler, og andre biler. Det er en relativt grov repræsentation af den virkelige verden. Det er også dyrt og tidskrævende at oprette, fordi computergenererede billedmodeller skal være håndgenererede.

Syntesen af nye baggrunde. En "syning" -metode blev brugt til at lave et komplet billede (til venstre). Det endelige billede blev syntetiseret efter efterbehandlingsprocesser, som hulfyldning og farveblanding. Kredit:Li et al., Sci. Robot. 4, eaaw0863 (2019)
AADS -systemet kombinerer fotos, videoer, og lidar-punktskyer-som er som 3D-gengivelser-med virkelige banedata for fodgængere, cykler, og andre biler. Disse baner kan bruges til at forudsige køreadfærd og fremtidige positioner for andre køretøjer eller fodgængere på vejen for sikrere navigation.
"Vi gengiver og simulerer den virkelige verden visuelt, ved hjælp af videoer og fotos, "sagde Manocha, "men vi fanger også reel adfærd og bevægelsesmønstre. Måden mennesker kører på er ikke let at fange ved hjælp af matematiske modeller og fysiske love. Så, vi udtrak data om virkelige baner fra al den video, vi havde til rådighed, og vi modellerede køreadfærd ved hjælp af samfundsvidenskabelige metoder. Denne datadrevne tilgang har givet os en meget mere realistisk og gavnlig trafiksimulator. "
Forskerne havde en mangeårig udfordring at overvinde ved at bruge ægte videobilleder og lidar-data til deres simulering:Hver scene skal reagere på en selvkørende bils bevægelser, selvom disse bevægelser muligvis ikke er blevet fanget af det originale kamera eller lidarsensoren. Uanset hvilken vinkel eller synspunkt der ikke fanges af et foto eller en video, skal det gengives eller simuleres ved hjælp af forudsigelsesmetoder. Derfor har simuleringsteknologi altid været så stærkt afhængig af computergenereret grafik og fysikbaserede forudsigelsesteknikker.
-
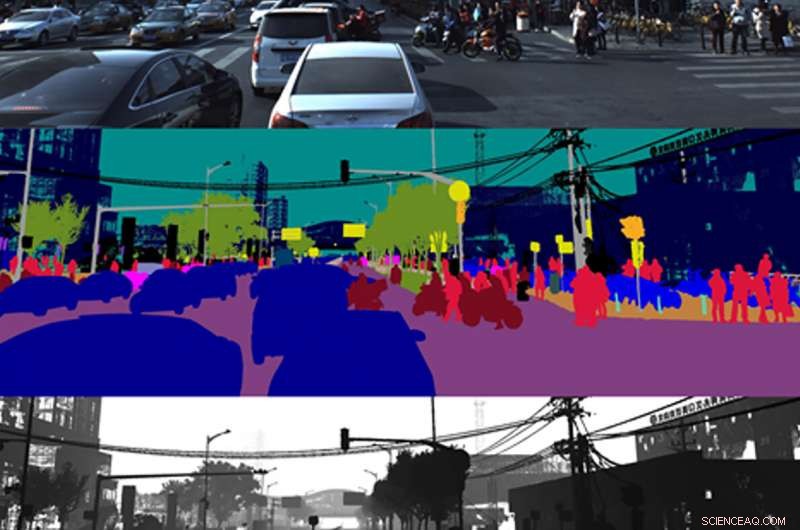
Datasættet produceret af AADS -systemet, herunder RGB -billeder (øverst), annotationer af forskellige objekter (midten), og en punktsky (et sæt datapunkter i rummet). Kredit:Li et al., Sci. Robot. 4, eaaw0863 (2019)
-
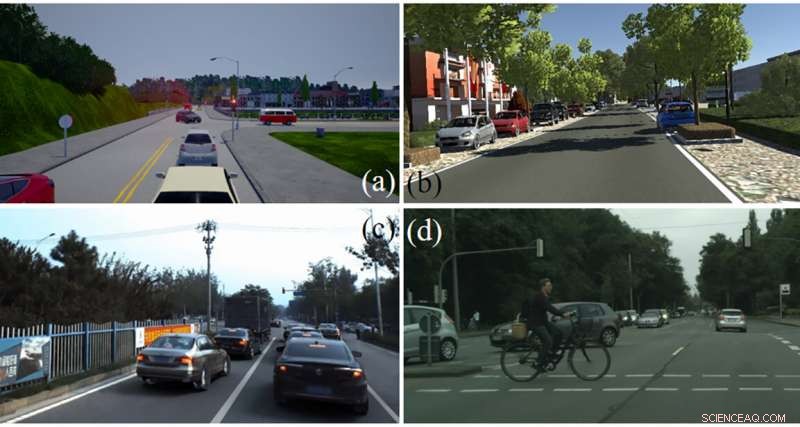
AADS -metoden frembragte et billede (nederste venstre hjørne), der mere visuelt ligner et ægte billede fra CityScapes (nederst til højre), et robust datasæt af gader i byen, end det er for CARLA (øverst til venstre), den nyeste og mest populære VR -simulator til autonom kørsel, eller det fuldt syntetiske datasæt VKITTI (øverst til højre). Kredit:Li et al., Sci. Robot. 4, eaaw0863 (2019)
For at overvinde denne udfordring, forskerne udviklede teknologi, der isolerer de forskellige komponenter i en gadebillede i den virkelige verden og gør dem til individuelle elementer, der kan syntetiseres for at skabe et væld af fotorealistiske kørescenarier.
Med AADS, køretøjer og fodgængere kan løftes fra et miljø og placeres i et andet med det korrekte lys- og bevægelsesmønster. Veje kan genskabes med forskellige trafikniveauer. Flere synsvinkler i hver scene giver mere realistiske perspektiver under vognbaneskift og sving. Ud over, avanceret billedbehandlingsteknologi muliggør glatte overgange og reducerer forvrængning sammenlignet med andre videosimuleringsteknikker. Billedbehandlingsteknikkerne bruges også til at udtrække baner, og derved modellere førerens adfærd.
"Fordi vi bruger virkelige videoer og virkelige bevægelser, vores opfattelsesmodul har mere præcise oplysninger end tidligere metoder, "Sagde Manocha." Og så, på grund af simuleringens realisme, vi kan bedre evaluere navigationsstrategier for et autonomt køre system. "
Manocha sagde, at ved at udgive dette værk, forskerne håber, at nogle af de virksomheder, der udvikler selvkørende køretøjer, kan inkorporere den samme datadrevne tilgang til at forbedre deres egne simulatorer til test og evaluering af autonome kørselssystemer.
 Varme artikler
Varme artikler
-
 Fjernelser fra Facebook afslører raffinement af russiske troldeI denne 9. januar, 2019, fil foto, medier og gæster blander sig inden en rundvisning i Facebooks nye 130, 000 kvadratmeter kontorer, som indtager de tre øverste etager i en 10-etagers Cambridge, Masse
Fjernelser fra Facebook afslører raffinement af russiske troldeI denne 9. januar, 2019, fil foto, medier og gæster blander sig inden en rundvisning i Facebooks nye 130, 000 kvadratmeter kontorer, som indtager de tre øverste etager i en 10-etagers Cambridge, Masse -
 Rusland bøder Twitter, Facebook for at opbevare data i udlandetTwitter og Facebook får endnu højere bøder, hvis de nægter at overholde loven En domstol i Moskva idømte torsdag en bøde på sociale netværksgiganter Twitter og Facebook for at ignorere en russisk
Rusland bøder Twitter, Facebook for at opbevare data i udlandetTwitter og Facebook får endnu højere bøder, hvis de nægter at overholde loven En domstol i Moskva idømte torsdag en bøde på sociale netværksgiganter Twitter og Facebook for at ignorere en russisk -
 14-årige FaceTime-fejlopdagelse kan rasle AppleGrant Thompson og hans mor, Michele, se på en iPhone i familiens køkken i Tucson, Ariz., på torsdag, 31. januar, 2019. Den 14-årige faldt over en fejl i iPhones FaceTime-gruppechat-funktion den 19. ja
14-årige FaceTime-fejlopdagelse kan rasle AppleGrant Thompson og hans mor, Michele, se på en iPhone i familiens køkken i Tucson, Ariz., på torsdag, 31. januar, 2019. Den 14-årige faldt over en fejl i iPhones FaceTime-gruppechat-funktion den 19. ja -
 Japansk firma siger, at 32 millioner dollars mangler i kryptovaluta -hackBITPoint Japan håndterer flere digitale valutaer, herunder bitcoin og ethereum En Tokyo-baseret kryptokurrencyudveksling sagde fredag, at den havde stoppet alle tjenester efter at have mistet kryp
Japansk firma siger, at 32 millioner dollars mangler i kryptovaluta -hackBITPoint Japan håndterer flere digitale valutaer, herunder bitcoin og ethereum En Tokyo-baseret kryptokurrencyudveksling sagde fredag, at den havde stoppet alle tjenester efter at have mistet kryp
- Hvad kan du gøre med spiralgraf? Hjælp med at forstå, hvordan galakser udvikler sig
- Elektroner pytter under høje magnetfelter, undersøgelse afslører
- Første amerikanske landsdækkende skøn over seksuel minoritetsrepræsentation i STEM-områder
- Hvordan klimaændringer vil påvirke foreskrevne brændingsdage
- Små afrikanske nystartede virksomheder tiltrækker interesse efter langsom start
- Har fotoner masser?