


For mange flysystemer er afhængige af for få sensorer

Fly har mange sensorer, leverer alle slags nyttige data. Kredit:vaalaa/Shutterstock.com
Den tilsyneladende forbindelse mellem fatale flystyrt i Indonesien og Etiopien er centreret omkring svigtet af en enkelt sensor. Jeg ved, hvordan det er:For nogle år siden, mens jeg fløj en Cessna 182-RG fra Albany, New York, til Fort Meade, Maryland, min flyvehastighedsindikator viste, at jeg fløj med en hastighed så langsom, at mit fly var i fare for ikke længere at generere nok løft til at blive i luften.
Havde jeg stolet på min lufthastighedssensor, Jeg ville have skubbet flyets næse ned i et forsøg på at genvinde farten, og muligvis belastet flyets ramme for meget, eller kommet farligt tæt på jorden. Men selv små fly er fyldt med sensorer:Mens jeg er bekymret for min flyvehastighed, Jeg lagde mærke til, at mit fly holdt i samme højde, motoren genererede den samme mængde strøm, vingerne mødte luften i en konstant vinkel, og jeg bevægede mig stadig over jorden med samme hastighed, som jeg havde været før flyvehastigheden angiveligt faldt.
Så i stedet for at overbelaste og potentielt styrte mit fly, Jeg var i stand til at rette den problematiske sensor og fortsætte mit fly uden yderligere hændelser. Som resultat, Jeg begyndte at undersøge, hvordan computere kan bruge data fra forskellige flysensorer til at hjælpe piloter med at forstå, om der er en reel nødsituation, eller noget meget mindre alvorligt.
Boeings svar på deres nedbrud har inkluderet at designe en softwareopdatering, der vil stole på to sensorer i stedet for én. Det er måske ikke nok.

En Cessna 182 i flyvning. Kredit:Rob Hodgkins/Flickr, CC BY-SA
Krydstjek sensordata
Som et fly trodser tyngdekraften, aerodynamiske principper udtrykt som matematiske formler styrer dens flyvning. De fleste af et flys sensorer er beregnet til at overvåge elementer af disse formler, for at forsikre piloterne om, at alt er, som det skal være – eller for at advare dem om, at noget er gået galt.
Mit team udviklede et computersystem, der ser på information fra mange sensorer, sammenligne deres aflæsninger med hinanden og med de relevante matematiske formler. Dette system kan registrere inkonsistente data, angive hvilke sensorer der højst sandsynligt fejlede, og, under visse omstændigheder, bruge andre data til at estimere de korrekte værdier, som disse sensorer skal levere.
For eksempel, min Cessna stødte på problemer, da den primære lufthastighedssensor, kaldet et "pitotrør, " frøs i kold luft. Andre sensorer om bord indsamler relateret information:GPS-modtagere måler, hvor hurtigt flyet dækker jorden. Vindhastighedsdata er tilgængelige fra computermodeller, der forudsiger vejret forud for flyvningen. Computere ombord kan beregne en estimeret flyvehastighed ved at kombinere GPS-data med information om vindhastighed og retning.
Hvis computerens estimerede lufthastighed stemmer overens med sensoraflæsningerne, højst sandsynligt er alt i orden. Hvis de er uenige, så er der noget galt – men hvad? Det viser sig, at disse beregninger er uenige på forskellige måder, afhængig af hvilken – eller flere – af GPS'en, vinddata eller lufthastighedssensorer er forkerte.
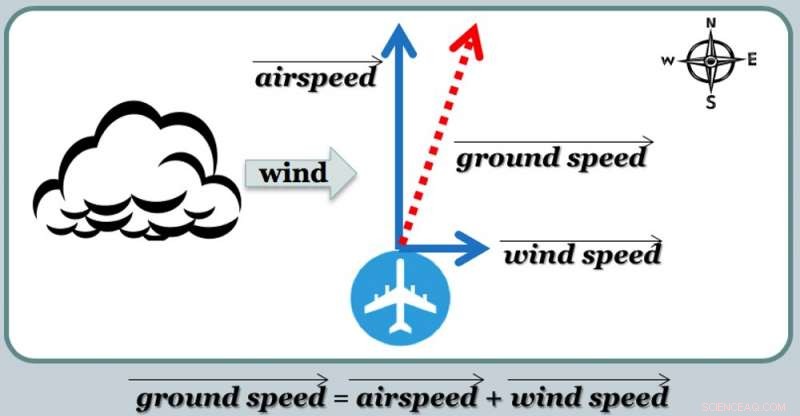
Ved at bruge oplysninger om hastigheden på jorden og de aktuelle vindforhold, en computer kan estimere flyets flyvehastighed. Kredit:Shigeru Imai og Carlos Varela, CC BY-ND
En test med rigtige data
Vi testede vores computerprogram med rigtige data fra flystyrtet i 2009 af Air France Flight 447. Undersøgelsen efter styrtet viste, at tre forskellige pitotrør frøs op, leverer en fejlagtig flyvehastighedsmåling og udløser en kæde af begivenheder, der ender med, at flyet styrter ned i Atlanterhavet, dræbte 228 passagerer og besætning.
Flyvedataene viste, at når pitotrørene frøs, de stoppede pludselig med at registrere flyvehastigheden som 480 knob, og rapporterede i stedet, at flyet gik gennem luften med 180 knob - så langsomt slukkede autopiloten sig selv og advarede de menneskelige piloter om, at der var et problem.
Men den indbyggede GPS registrerede, at flyet rejste hen over jorden med 490 knob. Og computermodeller af vejret indikerede, at vinden kom fra bagenden af flyet med omkring 10 knob.
Da vi førte disse data til vores computersystem, det opdagede, at pitotrørene var svigtet, og estimerede flyets reelle flyvehastighed inden for fem sekunder. Det opdagede også, når pitotrørene tøede op igen, 40 sekunder efter de frøs, og var i stand til at bekræfte, at deres aflæsninger igen var pålidelige.
En anden slags test
Vi brugte også vores system til at identificere, hvad der skete med Tuninter Flight 1153, som faldt i Middelhavet i 2005 på vej fra Italien til Tunesien, dræbte 16 af de 39 personer ombord.
Efter ulykken, undersøgelsen viste, at vedligeholdelsesarbejdere fejlagtigt havde installeret den forkerte brændstofmængdeindikator på flyet, så det rapporterede 2, 700 kg brændstof var i tankene, da flyet reelt kun havde 550 kg. Menneskelige piloter bemærkede ikke fejlen, og flyet løb tør for brændstof.
Brændstof er tungt, selvom, og dets vægt påvirker et flys ydeevne. Et fly med for lidt brændstof ville have håndteret anderledes end et med den rigtige mængde. For at beregne om flyet opførte sig som det skulle, med den rigtige mængde brændstof om bord, vi brugte det aerodynamiske matematiske forhold mellem flyvehastighed og løft. Når et fly er i planflyvning, løft er lig med vægt. Alt andet er det samme, et tungere fly skulle have kørt langsommere end Tuninter-flyet.
Vores program modellerer kun krydstogtfaser af flyvningen, hvor flyet er stillet, niveauflyvning – ikke accelerere eller ændre højde. Men det ville have været tilstrækkeligt at opdage, at flyet var for let og advare piloterne, som kunne have vendt om eller landet andre steder for at tanke. Tilføjelse af information om andre faser af flyvningen kan forbedre systemets nøjagtighed og reaktionsevne.
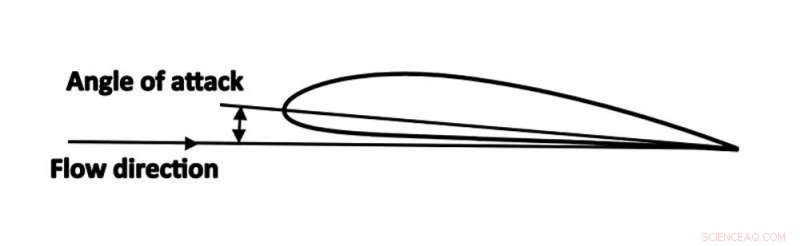
Angrebsvinklen beskriver, hvordan vingerne møder den modkørende luft. Kredit:J Doug McLean/Wikimedia Commons, CC BY-SA
Hvad med Boeing 737 Max 8-styrtet?
Hele rækken af data om Lion Air 610 og Ethiopian Airlines 302 er endnu ikke tilgængelig for offentligheden, men tidlige rapporter tyder på, at der var et problem med en af angrebsvinkelsensorerne. Mit forskerhold udviklede en metode til at kontrollere enhedens nøjagtighed baseret på flyets flyvehastighed.
Vi brugte aerodynamik og en flysimulator til at måle, hvordan variationer i angrebsvinklen – den stejlhed, hvormed vingerne møder den modkørende luft – ændrede den vandrette og lodrette hastighed på en Cessna 172. Dataene stemte overens med ydeevnen af en faktisk Cessna. 172 i flyvning. Ved at bruge vores model og system, vi kan skelne mellem en faktisk nødsituation – en farlig høj angrebsvinkel – og en svigtende sensor, der leverer fejlagtige data.
De faktiske tal for en Boeing 737 Max 8 ville være anderledes, selvfølgelig, men princippet er stadig det samme, bruge det matematiske forhold mellem angrebsvinkel og lufthastighed til at dobbelttjekke hinanden, og for at identificere defekte sensorer.
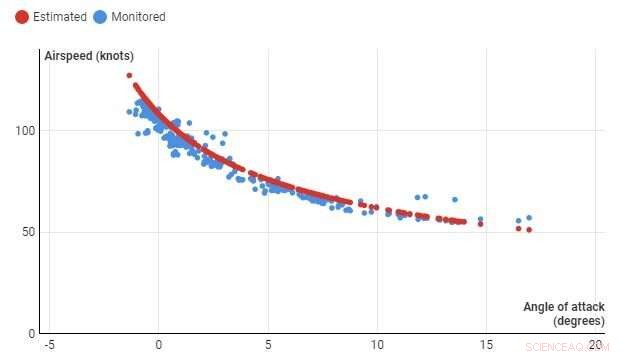
Kredit:Samtalen
Endnu bedre
Mens mit team fortsætter med at udvikle software til flydataanalyse, vi arbejder også på at forsyne den med bedre data. En potentiel kilde kunne være at lade fly kommunikere direkte med hinanden om vejr- og vindforhold på bestemte steder i bestemte højder. Vi arbejder også på metoder til præcist at beskrive sikre driftsforhold for flyvesoftware, der er afhængig af sensordata.
Sensorer fejler, men selv når det sker, automatiserede systemer kan være sikrere og mere effektive end menneskelige piloter. Efterhånden som flyvning bliver mere automatiseret og mere og mere afhængig af sensorer, det er bydende nødvendigt, at flysystemer krydstjekker data fra forskellige sensortyper, for at sikre mod ellers potentielt fatale sensorfejl.
Denne artikel er genudgivet fra The Conversation under en Creative Commons-licens. Læs den originale artikel. 
 Varme artikler
Varme artikler
-
 Facebook fremhæver tiltag for at bekæmpe 2020-desinformationKredit:CC0 Public Domain Facebook har torsdag sat fokus på skridt, som det tager for at bekæmpe udenlandsk indblanding og online desinformation ved det amerikanske valg i 2020. Foranstaltninger o
Facebook fremhæver tiltag for at bekæmpe 2020-desinformationKredit:CC0 Public Domain Facebook har torsdag sat fokus på skridt, som det tager for at bekæmpe udenlandsk indblanding og online desinformation ved det amerikanske valg i 2020. Foranstaltninger o -
 Partikelfysikere designer forenklet ventilator til COVID-19-patienterEt internationalt team af partikelfysikere under ledelse af Princetons Cristian Galbiati stoppede deres søgen efter mørkt stof for at fokusere på den stigende efterspørgsel efter ventilatorer, nødvend
Partikelfysikere designer forenklet ventilator til COVID-19-patienterEt internationalt team af partikelfysikere under ledelse af Princetons Cristian Galbiati stoppede deres søgen efter mørkt stof for at fokusere på den stigende efterspørgsel efter ventilatorer, nødvend -
 Etiopiske 737-piloter fulgte Boeings retningslinjer før styrtet:WSJBoeings 737 MAX-fly blev sat på jorden på verdensplan efter to dødbringende styrt på mindre end fem måneder Piloterne på Ethiopian Airlines Boeing 737 MAX-fly, der styrtede ned i sidste måned, tog
Etiopiske 737-piloter fulgte Boeings retningslinjer før styrtet:WSJBoeings 737 MAX-fly blev sat på jorden på verdensplan efter to dødbringende styrt på mindre end fem måneder Piloterne på Ethiopian Airlines Boeing 737 MAX-fly, der styrtede ned i sidste måned, tog -
 Forbedring af kvaliteten af AI kræver, at man går ud over det kvantitativeKredit:CC0 Public Domain Ingeniører fra kunstig intelligens bør hente ideer og ekspertise fra en bred vifte af samfundsvidenskabelige discipliner, herunder dem, der omfatter kvalitative metoder, f
Forbedring af kvaliteten af AI kræver, at man går ud over det kvantitativeKredit:CC0 Public Domain Ingeniører fra kunstig intelligens bør hente ideer og ekspertise fra en bred vifte af samfundsvidenskabelige discipliner, herunder dem, der omfatter kvalitative metoder, f
- Ny fremstillingsmetode kan føre til massive energibesparelser, nye materialer
- Forskere gennemgår metoder til estimering af sky view factor
- Atomskyers uventede adfærd udfordrer eksisterende teorier
- Sådan beregnes masseforhold
- Akkretionsdrevet pulsar afslører unik timingfejl
- Forskere skaber rustning til skrøbelig kvanteteknologi