


Et friktionsreduktionssystem til deformerbare robotfingerspidser
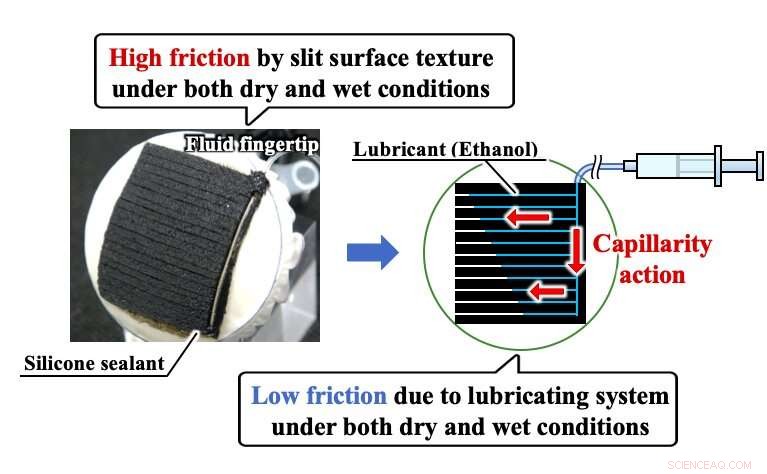
En illustration af forskernes flydende fingerspidskoncept. Kredit:Mizushima et al.
Forskere ved Kanazawa University har for nylig udviklet et friktionsreduktionssystem baseret på en smørende effekt, som kunne have interessante bløde robotapplikationer. Deres system, præsenteret i et papir offentliggjort i Taylor &Francis' Avanceret robotik tidsskrift, kunne hjælpe med udviklingen af robotter, der effektivt kan manipulere genstande under både tørre og våde forhold.
"Vores tidligere udviklede overfladetekstur eller hud til bløde robothænder giver høj friktion under både tørre og våde forhold, "Tetsuyou Watanabe, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "Imidlertid, denne høje friktion gør flere manipulationsstile (inklusive frigivelse og glidning) vanskelige. I nogle tilfælde, en grebet genstand klæber til overfladen. For at overvinde dette problem, vi udviklede et nyt friktionsreduktionssystem, der bruger smøremidler."
Når de udvikler deres system, Watanabe og hans kolleger hentede inspiration fra menneskelig adfærd. De observerede, at folk i supermarkeder ofte slikker deres fingre for at åbne plastikposer eller -beholdere. Lignende handlinger udføres også, når du forsøger at samle ark papir op eller vende siderne i en bog.
Forskerne fandt ud af, at denne 'finger slikke' adfærd er særlig almindelig hos midaldrende eller ældre mennesker, da aldring typisk fører til tørrere hud. Yngre mennesker, på den anden side, ofte ikke behøver at slikke fingrene, når de forsøger at manipulere plastik eller papir, fordi de automatisk kan styre hudens friktion via deres krops svedmekanismer.
"Selvfølgelig, Målet med at slikke fingre er at få høj friktion, og helt anderledes end vores formål (dvs. reduktion af friktion), " sagde Watanabe. "Men, normalt er formålet med smøremidler at reducere friktionen i mekaniske systemer. Dermed, vi overvejede muligheden for et friktionsreduktionssystem, der ligner svedkontrol hos mennesker."
Forskerne konstruerede en robotfingerspids, der har slidser i overfladen. Når smøremidler (f.eks. ethanol) injiceres rundt om grænserne af disse spalter, de trænger igennem hele overfladen, via en kapillarvirkning.
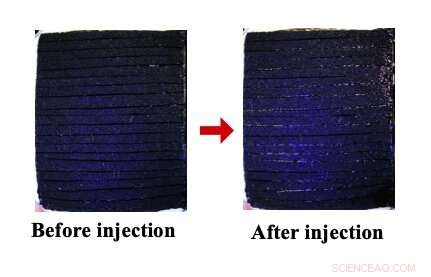
Fingerspidsen før og efter ethanol sprøjtes ind i den. Kredit:Mizushima et al.
"Vi brugte det tynde overfladeareal inklusive tekstur, og systemet fungerer på ikke kun stive, men også deformerbare kroppe uden tab af tilpasningsevne til et objekts form, " sagde Watanabe. "Derfor, den største fordel ved vores system er, at overfladefriktion kan kontrolleres, samtidig med at overfladens deformerbarhed og tilpasningsevne bevares. Det betyder, at det udviklede system kan fastgøres på robotter med bløde kroppe."
I de seneste år, brugen af bløde kroppe er blevet mere og mere populær i robotteknologi, på grund af deres høje deformerbarhed og tilpasningsevne. For eksempel, bløde robotter kan bevæge sig mere frit i deres omgivelser, uden at give omfattende skader, når de rammer vægge eller forhindringer. Ud over, bløde robothænder kan tilpasse sig en genstands form, mens de griber den, som muliggør mere avancerede manipulationsstrategier.
"En anden vigtig fordel ved vores system er, at det fungerer under både tørre og våde forhold, " tilføjede Watanabe. "Det er derfor meget nyttigt for robotter, der arbejder i menneskelige miljøer, fordi husarbejde udføres under begge disse forhold."
Forskerne indlejrede deres system i en robotfingerspids og evaluerede dets ydeevne i en række eksperimenter, der involverede at gribe og frigive objekter. Deres resultater tyder på, at den smøreteknik, de udviklede, effektivt kan reducere friktionen under både våde og tørre forhold.
"Som du kan forestille dig ud fra den menneskelige adfærd ved at slikke fingre, vand kan øge friktionen og i nogle tilfælde lade huden klæbe til overflader, " sagde Watanabe. "I modsætning hertil, ethanol reducerer friktionen. Den vigtige faktor for friktionsreduktion er spredningskoefficienten tæt forbundet med kapillarkræfter (dvs. overfladespænding)."
I denne sammenhæng, en lav kapillarkraft medfører let diffusion af væske gennem en overflade. Brug af ethanol, som har en lav kapillarkraft, forskerne var i stand til at reducere friktionen og nemt sprede smøremidlet over hele fingerspidsens overflade. En yderligere fordel ved ethanol er dens høje flygtighed, hvilket reducerer takttiden betydeligt.
"Vi har også observeret, at for at lette funktionen af vores system, overfladen må ikke være helt glat, " tilføjede Watanabe. "En overflade, der er en lille smule ru eller ujævn, kan forbedre dens funktion yderligere."
Robotter kunne snart støtte mennesker i en række forskellige indstillinger, for eksempel at hjælpe dem med husarbejde eller yde sygepleje. Da disse opgaver generelt udføres under både tørre og våde forhold, forskernes friktionsreduktionssystem kunne vise sig at være meget nyttigt.
"Håndtering og manipulation af objekter er hovedmålene for vores forskning, og så er opgaverne, herunder sådanne handlinger, de målrettede applikationer, " sagde Watanabe. "Et par eksempler er foldetøj, madlavning, vask, etc."
I fremtiden, smøresystemet udviklet af Watanabe og hans kolleger kunne informere udviklingen af bløde robotter, der kan manipulere objekter mere effektivt, i både tørre og våde omgivelser. Forskerne planlægger nu yderligere forskning med det formål at afgrænse og udvide deres systems mulige anvendelser.
"I øjeblikket, vi har kun kombineret fingerspidserne med vores system, " sagde Watanabe. "Som et næste skridt, vi vil gerne anvende vores friktionskontrolsystem til en robothånd. I øvrigt, applikationerne til systemet er stadig uklare, så vi vil gerne skitsere passende metoder til virkelige operationer, såsom foldning eller madlavning."
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Forsker i Facebook-dataskandale undskylderDette billede lavet fra en video leveret af CBS News/60 Minutes viser Cambridge University-forsker Aleksandr Kogan under et interview med CBSs 60 Minutes. Kogan, akademikeren i centrum af Facebook-dat
Forsker i Facebook-dataskandale undskylderDette billede lavet fra en video leveret af CBS News/60 Minutes viser Cambridge University-forsker Aleksandr Kogan under et interview med CBSs 60 Minutes. Kogan, akademikeren i centrum af Facebook-dat -
 Hong Kong Airlines vil afskedige 400 medarbejdere, da virus rammer byenHong Kong Airlines kæmpede allerede med svag efterspørgsel på grund af måneders protester i byen, der ramte turistsektoren Hong Kong Airlines sagde fredag, at det er blevet tvunget til at skære ne
Hong Kong Airlines vil afskedige 400 medarbejdere, da virus rammer byenHong Kong Airlines kæmpede allerede med svag efterspørgsel på grund af måneders protester i byen, der ramte turistsektoren Hong Kong Airlines sagde fredag, at det er blevet tvunget til at skære ne -
 DistME:En hurtig og elastisk distribueret matrixberegningsmotor, der bruger GPU'erDette er et mimetisk diagram (a) af 3D-datamultiplikation gennem CuboidMM og mimetisk diagram (b) af databehandlingsberegning ved hjælp af GPU. Kredit:DGIST DGIST annoncerede den 4. juli, at profe
DistME:En hurtig og elastisk distribueret matrixberegningsmotor, der bruger GPU'erDette er et mimetisk diagram (a) af 3D-datamultiplikation gennem CuboidMM og mimetisk diagram (b) af databehandlingsberegning ved hjælp af GPU. Kredit:DGIST DGIST annoncerede den 4. juli, at profe -
 Tyskland gør en indsats for at tackle momssvig inden for e-handelDen tyske regering, som anslår, at det taber op til 500 millioner euro om året i unapdi-omsætningsafgifter på varer købt fra e-handelssider som eBay og Amazon, har udarbejdet en ny lov, der skal stram
Tyskland gør en indsats for at tackle momssvig inden for e-handelDen tyske regering, som anslår, at det taber op til 500 millioner euro om året i unapdi-omsætningsafgifter på varer købt fra e-handelssider som eBay og Amazon, har udarbejdet en ny lov, der skal stram