


Delt kontrol giver en robot mulighed for at bruge to hænder, der arbejder sammen til at udføre opgaver
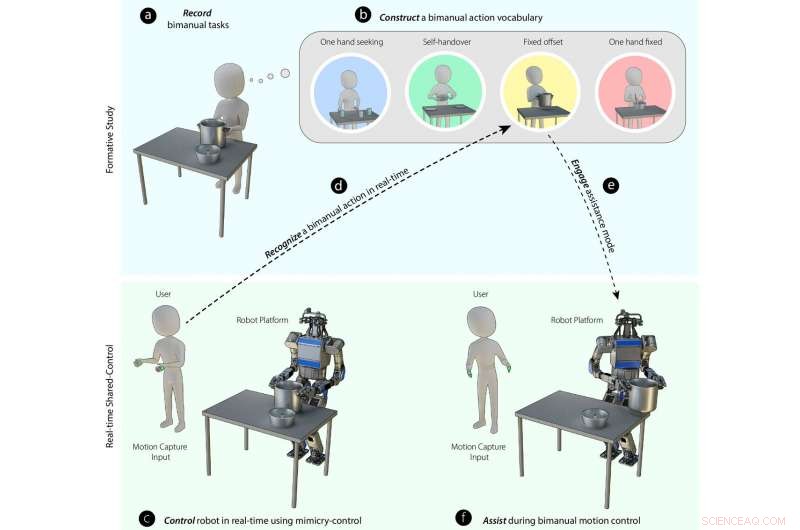
Diagram, der illustrerer det eksperimentelle design til bimanuel robotmanipulation. Et "bimanuelt handlingsordforråd" for robotter blev udviklet ud fra en omfattende analyse af menneskelige bimanuelle hånd- og armbevægelser (øverste panel mærket "formativ undersøgelse"). En robot programmeret med et neuralt netværk og et bimanuelt handlingsordforråd var knyttet til en frivillig, der forsøgte at kontrollere robotten for at fuldføre forskellige bimanuelle opgaver. Robotten fangede menneskets stillinger og udledte den korrekte bevægelse ved at trække fra sit bimanuelle ordforråd. Kredit:Rakita et al., Sci. Robot . 4, eaaw0955 (2019)
Et team af forskere fra University of Wisconsin og Naval Research Laboratory har designet og bygget et robotsystem, der muliggør bimanuel robotmanipulation gennem delt kontrol. I deres papir offentliggjort i tidsskriftet Videnskab robotik , gruppen forklarer ideerne bag deres arbejde, og hvor godt de fungerede i praksis.
Som forskerne bemærker, Det er meget kompliceret at bruge to hænder, der arbejder sammen for at fuldføre en opgave – det indebærer langt mere end blot to individuelle hænder, der arbejder uafhængigt af den samme opgave på samme tid. Når en person åbner en krukke, for eksempel, hjernen skal tjene som en slags formidler, at dirigere handlingen, mens den modtager og sender signaler til begge hænder. Sådanne enkle opgaver er så komplicerede, at robotter ikke er i stand til at udføre dem – det er derfor, stort set alle robotter arbejder med kun én hånd. I denne nye indsats, forskerne har taget et lille skridt i retning af at lære robotter, hvordan man bruger to hænder til at udføre en opgave.
Forskerne bemærker, at mange semi-robotapplikationer tillader robotter at tjene en augmentationsrolle, i stedet for at gøre noget på egen hånd. En kirurg, der styrer en robothånd ved at bruge sin egen hånd, er et eksempel. Men de bemærker også, at simpel mimik ikke ville fungere for tohånds forstærkede robotsystemer - sådanne bevægelser er for komplekse. Løsningen, de fandt, var at kombinere mimik med et dybt læringsnetværk. Resultatet var en teknik, der gjorde det muligt for en robot at udføre bimanuelle opgaver ved at dele kontrol med et menneske.
Arbejdet startede med at udstyre en robot med to arme og hænder. De tilføjede hardware for at give robotarmene mulighed for at kommunikere med et dybt læringsnetværk og sensorer placeret på et menneske. En robot fik at vide, hvilken opgave der ville blive forsøgt, og så udførte mennesket det. Som mennesket gjorde det, robotten gjorde sit bedste for at efterligne handlingen på samme tid. Ved at gentage proceduren mange gange fik robotten mulighed for at lære om de mange små opgaver, der var involveret i udførelsen af hovedopgaven, hvilket førte til en vis intuition fra dens side.
Over tid, som en robot arbejdede sammen med et menneske, den tilføjede sine egne kommandoer for at opnå et bedre resultat. Robotten udviklede sig ikke til at udføre opgaven på egen hånd – i stedet, det lærte at tjene som en mere fuldt dygtig udvidet assistent. Forskerne bemærker, at en sådan robot muligvis kan tjene som assistent for delvist handicappede. Også, Det ser ud til, at flåden kunne bruge sådan en robot til fjerntliggende undervandsoperationer.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Forskere udvikler høj opløsning, højfølsom nærhedskapacitans billedsensorNærhedskapacitansbillede af et fingeraftryk. Det optagne billede viser tydeligt ikke kun fingeraftrykket, men også svedporer i huden. Kredit:Shigetoshi Sugawa, Tohoku Universitet Et fingeraftryk k
Forskere udvikler høj opløsning, højfølsom nærhedskapacitans billedsensorNærhedskapacitansbillede af et fingeraftryk. Det optagne billede viser tydeligt ikke kun fingeraftrykket, men også svedporer i huden. Kredit:Shigetoshi Sugawa, Tohoku Universitet Et fingeraftryk k -
 Open source-system, der sikrer softwareopdateringer, der er uddannet for at beskytte førende cloud-…Kredit:CC0 Public Domain Update Framework (TUF), en open source-teknologi, der sikrer softwareopdateringssystemer, er blevet det første specifikationsprojekt, der er uddannet fra Linux Foundations
Open source-system, der sikrer softwareopdateringer, der er uddannet for at beskytte førende cloud-…Kredit:CC0 Public Domain Update Framework (TUF), en open source-teknologi, der sikrer softwareopdateringssystemer, er blevet det første specifikationsprojekt, der er uddannet fra Linux Foundations -
 Tyskland rejser 6,5 mia. euro fra salg af 5G-frekvenserBerlin vil kræve, at de vindende tilbudsgivere tilbyder tjenesten til mindst 98 procent af de tyske husstande og langs motorveje og jernbanelinjer Tyskland har rejst omkring 6,5 milliarder euro (7
Tyskland rejser 6,5 mia. euro fra salg af 5G-frekvenserBerlin vil kræve, at de vindende tilbudsgivere tilbyder tjenesten til mindst 98 procent af de tyske husstande og langs motorveje og jernbanelinjer Tyskland har rejst omkring 6,5 milliarder euro (7 -
 Britisk politi bruger ansigtsgenkendelse til at teste offentlighedens toleranceI dette filfoto dateret søndag den 12. januar, 2020, fodboldfans myldrer uden for Cardiff City fodboldstadion forud for det engelske mesterskabskamp mod Swansea City, i Cardiff, Wales, da politiet i S
Britisk politi bruger ansigtsgenkendelse til at teste offentlighedens toleranceI dette filfoto dateret søndag den 12. januar, 2020, fodboldfans myldrer uden for Cardiff City fodboldstadion forud for det engelske mesterskabskamp mod Swansea City, i Cardiff, Wales, da politiet i S
- Etik dilemma? Kvinder i PR er mere tilbøjelige til at søge allierede, før de giver råd til leder…
- Freelanceøkonomien med høje kvalifikationer stiger, efterhånden som digitale talentplatforme hjæ…
- Videospilproducent skal betale 10 millioner dollars i sag om kønsbias
- Grønland er på vej til at miste is hurtigere end i noget århundrede over 12 år, 000 år:studie
- Nyhedslaserdesign giver mere billigt multi-farve output
- Øge forskningsinfrastrukturernes synlighed? Det er der et værktøj til