


Innovative robotfingre lover et livshjælpemiddel, proteser
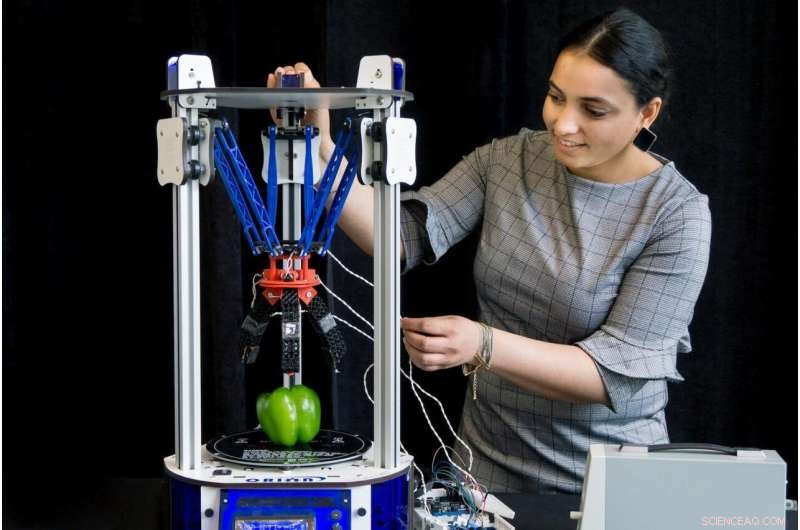
SFU PhD-kandidat Manpreet Kaur arbejder inden for blød robotteknologi og demonstrerer 3-D-printede humanoide robot-'fingre.' Kredit:SFU
Der er intet som det trøstende klem med din partners hånd. Men en robots hånd? Det er måske lidt anderledes.
Nu, en Simon Fraser University mekatronikuddannet og har designet 3-D-printede humanoide robot-"fingre", der efterligner styrken og ømheden af en menneskelig hånd. For personer med mobilitetsudfordringer eller lemmerforskelle, Robotter udstyret med disse fleksible fingre kan vise sig at være vigtige ledsagere eller redskaber til et selvstændigt liv.
"På dette felt kaldet blød robotik, vi henter inspiration fra naturen til at skabe materialer til robotter, der sikkert kan interagere med mennesker, " siger Manpreet Kaur, der udviklede de 3-D-printede humanoide fingre som en del af hendes nylige ph.d. afhandling, superviseret af professor i mekatronisk systemteknik Woo Soo Kim. Kaur dimitterer denne uge, efter at have forsvaret sit speciale i april.
Nutidens kommercielt tilgængelige robotter er ofte lavet af hårde materialer, ved forkert brug, kunne ridse eller spidde deres menneskelige operatører, eller simpelthen er ubehagelige at interagere med. Omvendt mange af de materialer, der udgør de såkaldte bløde robotter – såsom oppustelige eller gelélignende robotter – kan være for bløde til at bære belastninger og kan let punkteres ved regelmæssig brug og menneskelig interaktion.
"Vi har brug for noget, der udnytter fleksibiliteten og skånsomheden i de bløde materialer, men som også er stærkt og holdbart nok til at udføre forskellige opgaver, " forklarer Kaur.
Robotproducenter og -forskere har søgt at skabe personlige robotassistenter og bioniske lemmer eller proteser, der kombinerer holdbarheden af almindelige robotter med blidheden fra en blød robot.
For at løse udfordringen, Kaur designede en ny robotkrop, der måske lige har det rigtige touch.
I SFU's Additive Manufacturing Laboratory, Kaur udviklede letvægts, 3-D-printede polymerer struktureret med et unikt truss-design, der kan "tunes" til forskellige stivheder - fra blød og gummiagtig til hård og metallisk.
"Det smukke ved at bruge 3D-print er, at det giver os mulighed for at fremstille fingrene meget effektivt, siger Kim, som leder udviklingen af bæredygtige 3-D-printmaterialer, og hvis laboratorium vil videreudvikle teknologien nu, hvor Kaur er færdiguddannet.
"Processen er let skalerbar. Og, 3-D-print kan bruge mindre spild og mere bæredygtige materialer i selve fremstillingen."
Mens 3-D-printeren laver fingrene, Kaur indlejrer sensorer (også 3-D-printede), der registrerer tryk og belastning, efterligner et menneskes evne til at fornemme et klem på en hånd. Materialet er fleksibelt og bevæger sig som en menneskelig finger, men har også stød- og vibrationsabsorberende egenskaber, der er velegnede til de elektriske komponenter, det vil indeholde.
Kaur og Kim testede derefter robotfingerteknologien ved at skabe en robotgriber, der er i stand til dygtigt at håndtere bløde genstande såsom peberfrugter, tomater – selv æg – uden at knække eller punktere genstandene. Teknologien kunne have applikationer i nye former for protetiske lemmer og humanoide robotter, der begge er holdbare nok til daglig brug, og blød nok til at udføre delikate opgaver.
Forskningen forventes at blive offentliggjort til sommer, mens holdet afventer nyheder om et patent, som de har ansøgt om. Kaur samarbejder også med andre forskere om at skabe en robotprotesehånd fra hendes innovation.
"For at se mine resultater blive brugt til en applikation som denne, det er meget meningsfuldt for mig, " siger Kaur. "Denne forskning er meget spændende, og jeg ser frem til at se, hvordan den kan gøre robotter sikre og tilgængelige for andre."
Sidste artikelNy teknologi vil markant forbedre energihøsten fra PV-moduler
Næste artikelEU udgiver europæiske regler for dronedrift
 Varme artikler
Varme artikler
-
 Pentagon søger at genoverveje cloud-kontrakten til Microsoft (opdatering)Amazon hævder, at den blev lukket ude af Pentagon-aftalen på grund af præsident Donald Trumps vendetta mod virksomheden og dets topchef Jeff Bezos (R) Det amerikanske forsvarsministerium sagde tors
Pentagon søger at genoverveje cloud-kontrakten til Microsoft (opdatering)Amazon hævder, at den blev lukket ude af Pentagon-aftalen på grund af præsident Donald Trumps vendetta mod virksomheden og dets topchef Jeff Bezos (R) Det amerikanske forsvarsministerium sagde tors -
 Produktionssystemer med menneskelignende sanserSmart sensor og aktuator i én:Internetteknologier beskrives som kognitive, når de gør det muligt for værktøjsmaskiner at overvåge og optimere deres egen tilstand. Kredit:Fraunhofer Morgendagens in
Produktionssystemer med menneskelignende sanserSmart sensor og aktuator i én:Internetteknologier beskrives som kognitive, når de gør det muligt for værktøjsmaskiner at overvåge og optimere deres egen tilstand. Kredit:Fraunhofer Morgendagens in -
 Test af rumbatterier for renere himmelstrøgDenne testoveropladning af en lithium-ion-battericelle ved CEA-testfaciliteter i Frankrig resulterede i en eksplosion. Kredit:ESA/Airbus Ingeniører faldt ned i bunkers for at teste rumbatterier ti
Test af rumbatterier for renere himmelstrøgDenne testoveropladning af en lithium-ion-battericelle ved CEA-testfaciliteter i Frankrig resulterede i en eksplosion. Kredit:ESA/Airbus Ingeniører faldt ned i bunkers for at teste rumbatterier ti -
 Retten beordrer dieselforbud på større Berlin-vejeBerlins berømte Friedrichstrasse er omfattet af dieselforbuddet Berlin kan udelukke dieselbilister fra større hovedveje næste år, efter at en domstol tirsdag beordrede den tyske hovedstad til at f
Retten beordrer dieselforbud på større Berlin-vejeBerlins berømte Friedrichstrasse er omfattet af dieselforbuddet Berlin kan udelukke dieselbilister fra større hovedveje næste år, efter at en domstol tirsdag beordrede den tyske hovedstad til at f
- En usædvanlig superleder
- Ny lyddiffusor er ti gange tyndere end eksisterende designs
- Mindst 50 døde i Nepals monsun
- Hurtig deling, Androids svar på Apples AirDrop, forfalder snart
- Hvordan laver man klæbemidler til elektronik, køretøjer, og konstruktion hårdere?
- Sådan løses ligningssystemer ved Grafing