


En sværmrobottilgang inspireret af adfærd observeret i mikroorganismer
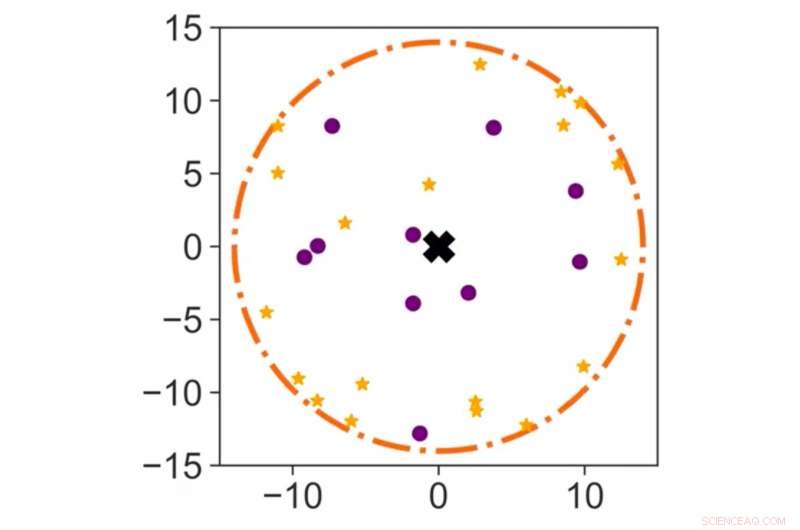
Kredit:Obute, Dogar og Boyle.
Mange dyr og mikroorganismer er i stand til at udføre komplekse opgaver, såsom at finde mad eller bygge rede, som et hold, eller "sværm". Et af de mest åbenlyse eksempler på dette er bier, da deres overlevelse som gruppe i høj grad afhænger af samarbejde med andre medlemmer af deres koloni. I løbet af de sidste par år, et stigende antal forskere har forsøgt at gengive denne fascinerende gruppedynamik i robotter, giver anledning til et studieområde kaldet sværmrobotik.
Forskere ved University of Leeds har for nylig præsenteret en ny sværmrobotteknologi kaldet kemotaksi, inspireret af en bestemt adfærd observeret i mikroorganismer, . Deres studie, forudgivet på arXiv, stammer fra forfatternes interesse for overlevelse af simple hvirvelløse dyr i dynamiske miljøer i den virkelige verden, og hvordan disse strategier kan anvendes i robotter.
"Under mit ph.d.- og første postdoc-stipendium, Jeg studerede bevægelsessystemet for en lille orm kaldet C. elegans (en populær modelorganisme), og med succes anvendte det, jeg lærte, til at styre bevægelsen af en slangelignende robot, "Jordan Boyle, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "Det aktuelle værk er inspireret af den samme organisme, men denne gang, ser på dens adfærd på et højere niveau - specifikt den måde, den navigerer mod fødekilder på ved hjælp af sin lugtesans."
I mangel af sensoriske input, C. elegans orme bevæger sig typisk fremad, men lav store sving med tilfældige tidsintervaller. Hvis de fornemmer, at en "positiv" lugt bliver stærkere, når de bevæger sig i en bestemt retning, frekvensen af deres drejninger falder. Omvendt, når den "positive" eller "ønskede" lugt bliver svagere, der er større sandsynlighed for, at de vender. denne adfærd, kendt som kemotaksi, giver dem i sidste ende mulighed for at trække mod steder, hvor en ønsket sensorisk stimulus er på sit højeste. I deres undersøgelse, Boyle, hans kollega Mehmet Dogar og ph.d. studerende Simon Obute satte sig for at replikere denne gruppestrategi i robotsværme og evaluere dens anvendelighed.
"En vigtig fordel ved denne strategi er, at den kun behøver en enkelt analog sensor, fordi gradienter detekteres over tid, når dyret bevæger sig, Boyle forklarede. "I vores arbejde, vi har erstattet lugt med lyd, fordi det er meget nemmere at skabe og fornemme med en robot, og bliver også svagere, når du kommer længere fra kilden, " Boyle forklarede. "De vigtigste fordele ved denne tilgang er, at den tillader en gruppe sværmrobotter at være begrænset til et bestemt område (dvs. omkring en lydkilde) uden at have behov for en fysisk grænse, kortlægningsevne eller komplekse sensoriske systemer."
Ved at bruge en algoritme, som de udviklede, forskerne anvendte kemotaksi på en sværm af udforskningsrobotter, i sidste ende får dem til at vende tilbage til et givent arbejdsområde omkring deres rede beliggende i et ubegrænset miljø. De testede deres præstationer, og dermed effektiviteten af deres tilgang, i en række simulerings- og hardwarevalideringseksperimenter. Selvom deres resultater primært er baseret på simuleringer og ikke implementeringer i den virkelige verden, forskerne fandt ud af, at det lykkedes dem at inkorporere nøjagtige modeller for lydudbredelse.
"Vores hardwareresultater er foreløbige, men lovende på nuværende tidspunkt, " sagde Boyle. "I sidste ende, dette arbejde kan være relevant for fysiske sværme bestående af meget små, billige robotter med begrænsede sanse- og beregningsevner. Selvom det er praktisk, implementering af robotsværme i den virkelige verden er stadig et stykke vej, de har potentiale i mange applikationer."
I fremtiden, eksperimenter med rigtige robotter kan hjælpe med at fastslå effektiviteten af denne nye bio-inspirerede tilgang. Hvis disse tests giver positive resultater, algoritmen udviklet af Boyle og hans kolleger kunne i sidste ende bruges til at forbedre navigations- og orienteringsstrategierne for robotsværme, især når de miljøer, de navigerer i, ikke er klart kortlagt eller defineret.
Obute arbejder nu på at integrere kemotaksi i mere komplekse sværmrobotsystemer, i simuleringer samt i enkelte hardwareeksperimenter. Hans afsluttende ph.d. project specifically investigates the possibility of using swarm robots for urban litter collection. Boyle, på den anden side, plans to continue exploring biological strategies that could prove particularly useful for robotics applications.
"I øjeblikket, I'm interested in applying similar techniques to a major project I'm involved in that aims to develop robot systems for monitoring the integrity of sewer and water distribution networks, " Boyle said.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Fleksibel, bærbar oral natriumsensor kan hjælpe med at forbedre hypertensionskontrolDen intraorale elektronik med en natriumsensor er baseret på en åndbar elastomer membran, der ligner en dental holder. Den ultratynde enhed er fleksibel og strækbar, og kan trådløst overføre data op t
Fleksibel, bærbar oral natriumsensor kan hjælpe med at forbedre hypertensionskontrolDen intraorale elektronik med en natriumsensor er baseret på en åndbar elastomer membran, der ligner en dental holder. Den ultratynde enhed er fleksibel og strækbar, og kan trådløst overføre data op t -
 En smart bil, der kan læse hjernens signalerKredit:Nissan EPFL- og Nissan-forskere er i stand til at læse en førers hjernesignaler og sende dem til et smart køretøj, så det kan forudse førerens bevægelser og lette kørselsprocessen. Nissan a
En smart bil, der kan læse hjernens signalerKredit:Nissan EPFL- og Nissan-forskere er i stand til at læse en førers hjernesignaler og sende dem til et smart køretøj, så det kan forudse førerens bevægelser og lette kørselsprocessen. Nissan a -
 Kan en kunstig intelligens betragtes som en person under loven?Sophia, en robot, der fik statsborgerskab i Saudi-Arabien. Kredit:MSC/wikimedia, CC BY Mennesker er ikke de eneste mennesker i samfundet – i hvert fald ifølge loven. I USA, virksomheder har fået y
Kan en kunstig intelligens betragtes som en person under loven?Sophia, en robot, der fik statsborgerskab i Saudi-Arabien. Kredit:MSC/wikimedia, CC BY Mennesker er ikke de eneste mennesker i samfundet – i hvert fald ifølge loven. I USA, virksomheder har fået y -
 Tyskland giver Daimler deadline for at indsende rettelser til dieselvarebilerDaimler CEO Dieter Zetsche ankommer til det tyske transportministerium i Berlin mandag, 28. maj, 2018, hvor han var blevet tilkaldt af den tyske transportminister Andreas Scheuer, efter at de tyske my
Tyskland giver Daimler deadline for at indsende rettelser til dieselvarebilerDaimler CEO Dieter Zetsche ankommer til det tyske transportministerium i Berlin mandag, 28. maj, 2018, hvor han var blevet tilkaldt af den tyske transportminister Andreas Scheuer, efter at de tyske my