


Teknikken bruger magneter, lys til at styre og omkonfigurere bløde robotter
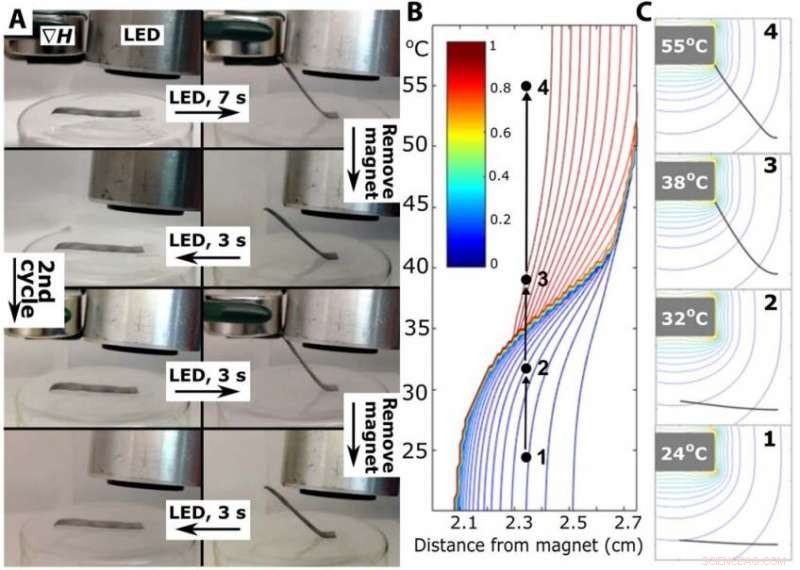
Shape memory cantilever indeholdende lænkede magnetiske partikler. (A) Aktivering og (B og C) simuleringer af en DiAPLEX cantilever film indeholdende kædede magnetiske partikler. Den permanente magnet (∇H) og LED er angivet i øverste venstre panel. (B) Konturerne viser graden af aktivering (0, flad; 1, kontaktmagnet) af et simuleret glødetråd på tværs af en række positioner og temperaturer. (C) Simulerede stillbilleder svarer til diskrete punkter langs stien angivet i (B), i en afstand på 2,3 cm fra magneten, hvilket stemmer overens med den eksperimentelle geometri til venstre. Se film S1 og S2 for eksperimenter og simuleringer af cantileveren. Kredit:Jessica A.-C. Liu, North Carolina State University.
Forskere fra North Carolina State University og Elon University har udviklet en teknik, der giver dem mulighed for at fjernstyre bevægelsen af bløde robotter, lås dem på plads så længe det er nødvendigt, og omkonfigurer dem senere til nye former. Teknikken er afhængig af lys og magnetiske felter.
"Vi er særligt begejstrede for omkonfigurerbarheden, " siger Joe Tracy, en professor i materialevidenskab og teknik ved NC State og tilsvarende forfatter til et papir om arbejdet. "Ved at konstruere materialets egenskaber, vi kan fjernstyre den bløde robots bevægelse; vi kan få det til at holde en given form; vi kan derefter returnere robotten til dens oprindelige form eller yderligere ændre dens bevægelse; og det kan vi gøre gentagne gange. Alle disse ting er værdifulde, i form af denne teknologis anvendelighed i biomedicinske eller rumfartsapplikationer."
Til dette arbejde, forskerne brugte bløde robotter lavet af en polymer indlejret med magnetiske jernmikropartikler. Under normale forhold, materialet er relativt stift og holder formen. Imidlertid, forskere kan varme materialet op ved hjælp af lys fra en lysdiode (LED), hvilket gør polymeren smidig. Når først de er bøjelige, forskere demonstrerede, at de kunne fjernstyre robottens form ved at anvende et magnetfelt. Efter at have dannet den ønskede form, forskere kunne fjerne LED-lyset, giver robotten mulighed for at genoptage sin oprindelige stivhed – og låser effektivt formen på plads.
Ved at påføre lyset en anden gang og fjerne magnetfeltet, kunne forskerne få de bløde robotter til at vende tilbage til deres oprindelige former. Eller de kunne anvende lyset igen og manipulere magnetfeltet for at flytte robotterne eller få dem til at antage nye former.
I eksperimentel afprøvning, forskerne viste, at de bløde robotter kunne bruges til at danne "gribere" til at løfte og transportere genstande. De bløde robotter kunne også bruges som udkragere, eller foldet til "blomster" med kronblade, der bøjer i forskellige retninger.
"Vi er ikke begrænset til binære konfigurationer, såsom at en griber enten er åben eller lukket, " siger Jessica Liu, førsteforfatter af papiret og en ph.d. studerende ved NC State. "Vi kan styre lyset for at sikre, at en robot vil holde sin form på ethvert tidspunkt."
Ud over, forskerne udviklede en beregningsmodel, der kan bruges til at strømline den bløde robotdesignproces. Modellen giver dem mulighed for at finjustere en robots form, polymer tykkelse, overfloden af jernmikropartikler i polymeren, og størrelsen og retningen af det påkrævede magnetfelt, før man konstruerer en prototype for at udføre en specifik opgave.
"Næste trin omfatter optimering af polymeren til forskellige applikationer, " siger Tracy. "F.eks. ingeniørpolymerer, der reagerer ved forskellige temperaturer for at imødekomme behovene for specifikke applikationer."
Papiret, "Fototermisk og magnetisk styret rekonfiguration af polymerkompositter til blød robotik, " står i journalen Videnskabens fremskridt . Første forfatter af papiret er Jessica Liu, en ph.d. studerende ved NC State. Avisen var medforfatter af Jonathan Gillen, en tidligere undergraduate ved NC State; Sumeet Mishra, en tidligere ph.d. studerende ved NC State; og Benjamin Evans, en lektor i fysik ved Elon University.
 Varme artikler
Varme artikler
-
 Internet -tv og mobilvideovisning truer med at få energibehovet til at stigeKredit:CC0 Public Domain Forskere opfordrer til omgående handling, da en enorm vækst i internetvideostreaming truer med at øge problemet med at imødekomme nationens fremtidige højeste vinterelektr
Internet -tv og mobilvideovisning truer med at få energibehovet til at stigeKredit:CC0 Public Domain Forskere opfordrer til omgående handling, da en enorm vækst i internetvideostreaming truer med at øge problemet med at imødekomme nationens fremtidige højeste vinterelektr -
 Gemme IoT fra botnetsKredit:CC0 Public Domain Fremkomsten af Thing Internet, hovedsagelig smarte enheder med forbindelse til internettet har haft mange fordele, men med det følger problemet med, hvordan man håndtere
Gemme IoT fra botnetsKredit:CC0 Public Domain Fremkomsten af Thing Internet, hovedsagelig smarte enheder med forbindelse til internettet har haft mange fordele, men med det følger problemet med, hvordan man håndtere -
 Kina tilbyder Elon Musk permanent opholdTeslas CEO Elon Musk (L) blev tilbudt et kinesisk grønt kort af premier Li Keqiang Tesla-chef Elon Musk er blevet tilbudt et grønt kort, Kina sagde torsdag, et privilegium, som en elitegruppe af u
Kina tilbyder Elon Musk permanent opholdTeslas CEO Elon Musk (L) blev tilbudt et kinesisk grønt kort af premier Li Keqiang Tesla-chef Elon Musk er blevet tilbudt et grønt kort, Kina sagde torsdag, et privilegium, som en elitegruppe af u -
 Forskere udvikler 3-D-printede objekter, der kan spore og gemme, hvordan de brugesUniversity of Washington-teamet 3D printede en e-NABLE-arm med en prototype af deres tovejssensor (blå og hvid), der overvåger håndens åbning og lukning ved at bestemme håndleddets vinkel. Kredit:Mark
Forskere udvikler 3-D-printede objekter, der kan spore og gemme, hvordan de brugesUniversity of Washington-teamet 3D printede en e-NABLE-arm med en prototype af deres tovejssensor (blå og hvid), der overvåger håndens åbning og lukning ved at bestemme håndleddets vinkel. Kredit:Mark
- Sådan beregnes hjulomkreds
- Facebook betalte brugere for at spore smartphonebrug:rapport
- Den stærkeste tyfon i et kvart århundrede rammer Japan
- NASAs midlertidige kontrol af den tropiske storm Belna finder potentiale for kraftig nedbør
- Merkel:1 million billadestationer i Tyskland inden 2030
- Kunne genoplivning af mammutter hjælpe med at stoppe arktiske emissioner?