


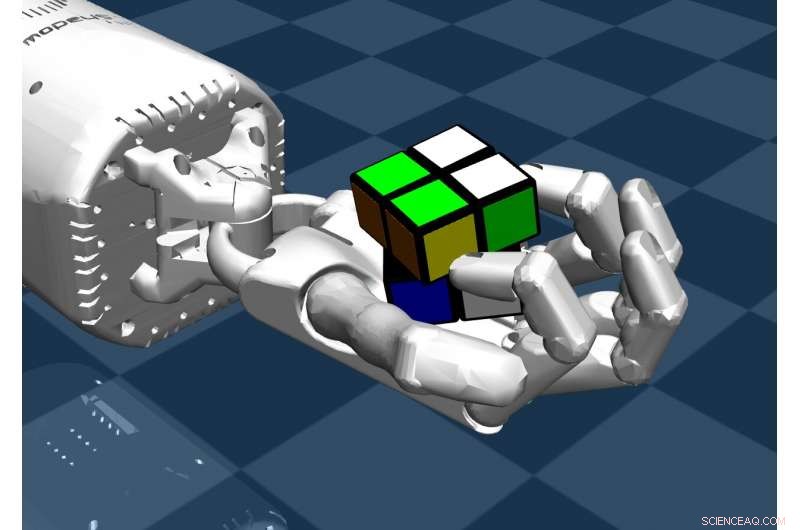
Løsning af en Rubiks-terning med en fingernem hånd
Kredit:Li et al.
I de seneste år, et stigende antal forskere har udforsket brugen af robotarme eller fingernem hænder til at løse en række dagligdagsopgaver. Mens mange af dem med succes har løst simple opgaver, såsom greb eller grundlæggende manipulation, komplekse opgaver, der involverer flere trin og præcise/strategiske bevægelser, har indtil videre vist sig sværere at løse.
Et team af forskere ved det kinesiske universitet i Hong Kong og Tencent AI Lab har for nylig udviklet en dyb læringsbaseret tilgang til at løse en Rubiks terning ved hjælp af en fingerfærdig hånd med flere fingre. Deres tilgang, præsenteret i et papir, der er forududgivet på arXiv, gør det muligt for en behændig hånd at løse mere avancerede manipulationsopgaver i hånden, såsom det berømte Rubik's Cube-puslespil.
En Rubiks terning er en plastikterning dækket af flerfarvede firkanter, der kan flyttes til forskellige positioner. Målet med puslespillet er strategisk at vride og vende terningens sektioner, indtil alle firkanterne på hver af dens flader er af samme farve.
"At se nogle forskere bruge robothænder med flere fingre til opgaver som at stille en genstand og manipulere et værktøj, vi overvejede, om vi kunne bruge en robothånd til mere komplicerede opgaver, såsom at løse en Rubik's Cube, "Tingguang Li, en af de forskere, der har udført undersøgelsen, fortalte TechXplore.
For at tackle Rubik's Cube-puslespillet ved hjælp af en fingernem hånd, Li og hans kolleger udviklede en hierarkisk dyb forstærkningslæringsmodel, der i det væsentlige adskiller opgaven i en planlægnings- og en manipulationsfase. I deres undersøgelse, forskerne anvendte denne tilgang til en femfingret fingernem hånd kaldet Shadow Hand.
"Udfordringerne ved at løse en Rubik's Cube ved hjælp af en robothånd er todelt:For det første, at styre en robothånd er meget vanskelig, da den har en høj grad af frihed; sekund, at løse en Rubik's Cube kræver en lang bevægelsessekvens, " Li forklarede. "Vores idé kombinerer en dyb forstærkende læringsalgoritme, som har mange vellykkede applikationer, og menneskelig viden. Målet er at vise en robothånds behændighed og løse en tilfældigt forvrænget Rubiks terning med en høj succesrate.
Den hierarkiske model foreslået af forskerne har to nøglekomponenter:en til planlægning og en til manipulation. I første omgang, planlægningskomponenten (dvs. en modelbaseret terningløser) identificerer den optimale tilstandssekvens til løsning af puslespillet. Derefter, manipulationscontrolleren (dvs. en modelfri kubeoperatør) styrer den fingernemme hånds fingre til at udføre disse trin.
"Vores tilgang har to lag:Det højere lag planlægger en bane for at løse en Rubiks terning, som er sammensat af atomariske handlinger, og det nederste lag lærer at implementere hver atomare handling, " sagde Li. "De atomare handlinger læres via dyb forstærkningslæringsmodel, slippe af med manuelt design af komplicerede lavniveau-controllere."
Forskerne trænede og evaluerede deres model ved hjælp af en high-fidelity simulator, som de også byggede. De testede deres models ydeevne i en række eksperimenter, hvor den virtuelle fingernem hånd blev fodret med 1400 tilfældigt forvrængede Rubiks terninger og fandt ud af, at den opnåede en gennemsnitlig succesrate på 90,3 procent.
"Vi viste, at den flerfingrede robothånd har et enormt potentiale for komplicerede opgaver, "Li sagde. "Integration af læringsbaserede algoritmer kan hjælpe med at reducere det tunge arbejde med manuelt at designe kontrolalgoritmer. Jeg håber, at dette vil tiltrække flere forskere til dette område og opmuntre dem til at udvikle nye tilgange til yderligere at øge fingerfærdigheden af robothænder."
-
Kredit:Li et al.
-

Kredit:Li et al.
-
Kredit:Li et al.
I modsætning til tidligere foreslåede tilgange, modellen udviklet af Li og hans kolleger gør det muligt at udføre en mere kompleks manipulationsopgave i hånden ved hjælp af en fingernem hånd, specifikt at løse en Rubik's Cube. Indtil nu, forskerne har kun evalueret deres tilgang i simuleringer, men de planlægger nu at anvende deres algoritme på en rigtig robothånd.
© 2019 Science X Network
Sidste artikelBærbare sensorer registrerer, hvad der er i din sved
Næste artikelTrump siger, at Apple vil bruge enorme summer i USA
 Varme artikler
Varme artikler
-
 Tyskland er EUs Eldorado for pengeautomaterOmkring 369 pengeautomater i Tyskland blev sprængt af kriminelle bander sidste år, en stigning på 38 procent i forhold til 2017 Søg efter sort Audi efter forsøg på at sprænge en pengeautomat, Nabo
Tyskland er EUs Eldorado for pengeautomaterOmkring 369 pengeautomater i Tyskland blev sprængt af kriminelle bander sidste år, en stigning på 38 procent i forhold til 2017 Søg efter sort Audi efter forsøg på at sprænge en pengeautomat, Nabo -
 Disney CEO forlader Apples board med videoopgør truendeI denne mandag, Marts 13, 2017, fil foto, Walt Disney Co. CEO Robert Iger deltager i en særlig screening af Disneys Beauty and the Beast i Alice Tully Hall, i New York. Walt Disney Co. CEO Robert Iger
Disney CEO forlader Apples board med videoopgør truendeI denne mandag, Marts 13, 2017, fil foto, Walt Disney Co. CEO Robert Iger deltager i en særlig screening af Disneys Beauty and the Beast i Alice Tully Hall, i New York. Walt Disney Co. CEO Robert Iger -
 Satellitrækken tester Storbritanniens post-Brexit-sikkerhedsplanerEmbedsmænd er blevet overrasket over Bruxelles beslutning om at nægte London adgang til krypterede signaler fra EUs Galileo satellitnavigationssystem, lanceringen af fire af dem ses i 2017, citerer
Satellitrækken tester Storbritanniens post-Brexit-sikkerhedsplanerEmbedsmænd er blevet overrasket over Bruxelles beslutning om at nægte London adgang til krypterede signaler fra EUs Galileo satellitnavigationssystem, lanceringen af fire af dem ses i 2017, citerer -
 Vil du have adgang til din Facebook -gruppe? I fremtiden, du skal muligvis betaleEt nyt AI -værktøj, der er skabt til at hjælpe med at identificere visse former for stofmisbrug baseret på en hjemløs ungdoms Facebook -indlæg, kan give hjemløse krisecentre vigtige oplysninger, der k
Vil du have adgang til din Facebook -gruppe? I fremtiden, du skal muligvis betaleEt nyt AI -værktøj, der er skabt til at hjælpe med at identificere visse former for stofmisbrug baseret på en hjemløs ungdoms Facebook -indlæg, kan give hjemløse krisecentre vigtige oplysninger, der k
- Det britiske energiselskab siger, at strømafbrydelsen ikke var forårsaget af cyberangreb
- Ny teori kan føre til bedre batterier, brændstofceller
- Kernfysikere rejser mod en mytisk ø
- Egypten siger, at arkæologer har afsløret 20 gamle kister
- Stejle momentumgradienter spiller en stor rolle i kystnedbør
- Ohio -beboere kæmper for at give Lake Erie juridiske rettigheder