


Forskere udvikler procesflow til højopløselig 3D-printning af bløde mini-robotaktuatorer
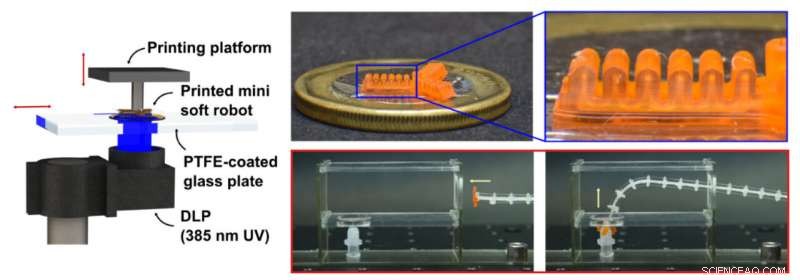
Et generisk procesflow foreslås til at guide 3D-printning af bløde pneumatiske miniatureaktuatorer, der er mindre end en mønt. En blød snavsfjerner med en integreret miniature griber kan realisere navigation gennem et begrænset rum og samling af små genstande i svært tilgængelige positioner. Kredit:SUTD
Bløde robotter er en klasse af robotsystemer lavet af kompatible materialer og i stand til sikkert at tilpasse sig komplekse miljøer. De har oplevet hurtig vækst for nylig og kommer i en række forskellige designs, der spænder over flere længdeskalaer, fra meter til submikrometer.
I særdeleshed, små bløde robotter i millimeterskala er af praktisk interesse, da de kan designes som en kombination af miniatureaktuatorer, der blot drives af pneumatisk tryk. De er også velegnede til navigation i lukkede områder og manipulation af små genstande.
Imidlertid, nedskalering af bløde pneumatiske robotter til millimeter resulterer i finere funktioner, der reduceres med mere end én størrelsesorden. Designkompleksiteten af sådanne robotter kræver stor delikatesse, når de fremstilles med traditionelle processer som støbning og blød litografi. Selvom nye 3D-printteknologier som digital lysbehandling (DLP) tilbyder høje teoretiske opløsninger, Det har stadig været udfordrende at håndtere hulrum og kanaler i mikroskala uden at forårsage tilstopning. Ja, vellykkede eksempler på 3-D-printning af bløde pneumatiske miniaturerobotter er sjældne.
For nylig, forskere fra Singapore og Kina, nemlig fra Singapore University of Technology and Design (SUTD), Southern University of Science and Technology (SUSTech) og Zhejiang University (ZJU), foreslået et generisk procesflow til vejledning af DLP 3-D-print af miniature pneumatiske aktuatorer til bløde robotter med en samlet størrelse på 2-15 mm og en funktionsstørrelse på 150-350 μm (se billede). Deres forskning blev offentliggjort i Avancerede materialeteknologier .
"Vi udnyttede den høje effektivitet og opløsning af DLP 3-D-print til at fremstille bløde miniature-robotaktuatorer, " sagde lektor Qi (Kevin) Ge fra SUSTech, ledende forsker i forskningsprojektet. "For at sikre pålidelig udskrivning og mekanisk ydeevne i de trykte produkter, vi introducerede et nyt paradigme for systematisk og effektiv tilpasning af materialeformuleringen og nøglebehandlingsparametrene."
I DLP 3-D print, fotoabsorbere tilføjes almindeligvis til polymeropløsninger for at forbedre udskriftsopløsningerne i både laterale og vertikale retninger. I mellemtiden en for høj dosis fører til hurtig nedbrydning af materialets elasticitet, hvilket er afgørende for, at bløde robotter kan klare store deformationer.
"For at opnå en rimelig afvejning, vi valgte først en fotoabsorber med god absorbans ved bølgelængden af det projicerede UV-lys og bestemte den passende materialeformulering baseret på mekaniske ydeevnetest. Næste, vi karakteriserede hærdningsdybden og XY-troskaben for at identificere den passende kombination af eksponeringstid og snittet lagtykkelse, " forklarede den første forfatter Yuan-Fang Zhang fra SUTD.
"Ved at følge dette procesflow, vi er i stand til at producere et sortiment af miniature bløde pneumatiske robotaktuatorer med forskellige strukturer og morphing modes, alle mindre end en Singapore Dollar mønt, på et selvbygget multimateriale 3-D printsystem. Den samme metode bør være kompatibel med kommerciel stereolitografi (SLA) eller DLP 3-D-printere, da der ikke kræves hardwareændringer, " sagde den tilsvarende forfatter professor Qi Ge fra SUSTech.
For at eksemplificere de potentielle anvendelser, forskerne udtænkte også en blød snavsfjerner bestående af en kontinuum manipulator og en 3-D printet miniature blød pneumatisk griber. Den kan navigere gennem et begrænset rum og samle små genstande i svært tilgængelige positioner.
Den foreslåede tilgang baner vejen for 3-D-printning af bløde miniaturerobotter med komplekse geometrier og sofistikerede multimateriale-design. Denne integration af printede bløde pneumatiske aktuatorer i et robotsystem giver muligheder for potentielle anvendelser såsom vedligeholdelse af jetmotorer og minimalt invasiv kirurgi.
 Varme artikler
Varme artikler
-
 Tekniske virksomheder gør ikke nok for at beskytte brugere mod phishing -svindelKredit:CC0 Public Domain Teknologivirksomheder kunne gøre meget mere for at beskytte enkeltpersoner og organisationer mod truslerne fra phishing, ifølge forskning fra University of Plymouth. Imid
Tekniske virksomheder gør ikke nok for at beskytte brugere mod phishing -svindelKredit:CC0 Public Domain Teknologivirksomheder kunne gøre meget mere for at beskytte enkeltpersoner og organisationer mod truslerne fra phishing, ifølge forskning fra University of Plymouth. Imid -
 Ny antenneteknologi til ekstremt hurtig 5G og 6G testet med succesFoto:L Ksenia Korzun Mange tilsluttede enheder, film downloadet på få sekunder, autonom kørsel:den ekstremt hurtige 5G skulle gøre alt dette muligt. Problemet er, at den hurtigste form for 5G nu k
Ny antenneteknologi til ekstremt hurtig 5G og 6G testet med succesFoto:L Ksenia Korzun Mange tilsluttede enheder, film downloadet på få sekunder, autonom kørsel:den ekstremt hurtige 5G skulle gøre alt dette muligt. Problemet er, at den hurtigste form for 5G nu k -
 Apple om miljøet:At gøre det rigtige for planeten er godt for forretningenKredit:CC0 Public Domain Apple er helt med på at håndtere klimaændringer. Forud for Jordens Dag, Apple annoncerede fremskridt med nogle af sine seneste grønne initiativer, især, at det næsten har
Apple om miljøet:At gøre det rigtige for planeten er godt for forretningenKredit:CC0 Public Domain Apple er helt med på at håndtere klimaændringer. Forud for Jordens Dag, Apple annoncerede fremskridt med nogle af sine seneste grønne initiativer, især, at det næsten har -
 Bruxelles overvejer skat på bilbrug for at reducere trafikpropperDen belgiske hovedstad er berygtet for sine trafikpropper Embedsmænd i Bruxelles-regionen ser på en ny skat for at tackle byens berygtede trafikpropper ved at straffe tung bilbrug, Det sagde regio
Bruxelles overvejer skat på bilbrug for at reducere trafikpropperDen belgiske hovedstad er berygtet for sine trafikpropper Embedsmænd i Bruxelles-regionen ser på en ny skat for at tackle byens berygtede trafikpropper ved at straffe tung bilbrug, Det sagde regio
- NASA satellitdata viser Humbertos strukturændring
- Forskere logger nyfunden forståelse af farvands reaktioner på skiftende temperaturer
- Prokaryotiske vs eukaryotiske celler: ligheder og forskelle
- Californien befinder sig allerede i tørke, da sommeren truer
- Udvikling af en ny teknik til dyrkning af højkvalitets galliumnitridkrystaller
- Klima dysterhed og undergang? Kom med det. Men vi har brug for historier om handling, også