


Hurtigere udvikling af integrerede systemer

Drone med stereokamera. Den lille hvide kasse rummer det integrerede system, som evaluerer de lidt forskudte billeder fra de to kameraer i realtid for at kunne opdage forhindringer. Kredit:Fraunhofer IOSB
Uanset om det er til bilen eller dronen:Udvikling af billedbehandlingssoftware til integrerede systemer tager meget tid og er derfor meget dyrt. Nu gør Tulipp-platformen det muligt at udvikle energieffektive indlejrede billedbehandlingssystemer hurtigere og billigere, med en drastisk reduktion af time-to-market. Fraunhofer Institute for Optronics, Systemteknologier og billedudnyttelse IOSB er medlem af EU-konsortiet, som forenklede processen.
Ved første øjekast droner, førerassistentsystemer og mobilt medicinsk diagnostisk udstyr ser ikke ud til at have meget tilfælles. Men i virkeligheden gør de det:De gør alle i stigende grad brug af billedbehandlingskomponenter, for eksempel til at opdage forhindringer og fodgængere. Billedbehandling kan også bruges med mobilt røntgenudstyr for at sikre tilstrækkelig billedkvalitet ved reducerede strålingsniveauer, dermed betydeligt reducere radioaktiv eksponering.
I modsætning til en arbejdsstationscomputer, hvor dimensioner og energiforbrug ikke er særlig kritiske faktorer, applikationer som disse kræver for små, letvægts, energieffektive billedbehandlingskomponenter, der ikke desto mindre er i stand til realtid. Hardwareplatforme baseret på konventionelle computerarkitekturer og processorer kan ikke opfylde disse krav korrekt. Dette er grunden til, at indlejrede systemer, der bruger feltprogrammerbare gate-arrays (FPGA'er), ofte bruges.
Feltprogrammerbare gate-arrays er logiske komponenter, hvis kredsløbsstruktur frit kan konfigureres ved hjælp af en særlig type programmering, normalt involverer lavniveausproget VHDL. Der er et problem, dog:Størstedelen af billedbehandlingsprogrammer er skrevet på programmeringssprog på højere niveau, f.eks. C/C ++, og deres migrering til de indlejrede systemer er meget kompliceret. Ikke alene adskiller VHDL sig meget fra andre programmeringssprog, men koden skal også tilpasses den specifikke hardware. Dette betyder, at selv eksisterende VHDL-programmer ikke kan overføres til anden hardware. Softwareudviklere skal starte næsten fra bunden med hvert nyt system.
Starter kit til hurtig implementering af især energieffektive integrerede systemer

Stereokameraet og det indlejrede system installeret på dronen. Kredit:Fraunhofer IOSB
Et konsortium af otte partnere fra seks lande, herunder Fraunhofer Institute for Optronics, Systemteknologier og billedudnyttelse IOSB i Karlsruhe, har nu betydeligt forenklet denne procedure i Tulipp-projektet. "Resultatet er en udviklingsplatform bestående af designretningslinjer, en konfigurerbar hardwareplatform og et real-time-kompatibelt operativsystem, der understøtter multicore-processorer, samt en programmeringsværktøjskæde, " siger Dr.-Ing. Igor Tchouchenkov, gruppechef hos Fraunhofer IOSB. "Et startsæt sat på markedet af en af vores partnere i Tulipp giver yderligere support. Startsættet gør udviklingen af sådanne applikationer meget hurtigere og nemmere. Portering af C++ programmer til FPGA, hvilket ofte betyder flere måneders arbejde for udvikleren, kan håndteres inden for få uger ved hjælp af Tulipp -startsættet. "
Det betyder, at udvikleren først skal overveje, baseret på softwaren programmeret i C++, hvilke kodeelementer der skal distribueres til hvilke hardwarekomponenter og hvilke programtrin der kunne optimeres eller paralleliseres. De formulerede designretningslinjer hjælper med denne opgave. Så kommer startsættet i spil. Den indeholder den konfigurerbare hardware, som de nødvendige sensorer og outputenheder kan sluttes til, det multiprocessor-kompatible realtidsoperativsystem, og det, der kaldes STHEM-værktøjskæden. Applikationerne i værktøjskæden gør det muligt at optimere C ++ - programmet på en sådan måde, at det kan portes til FPGA så let og hurtigt som muligt. "Et særligt fokus i værktøjskæden er på energioptimering:når alt kommer til alt, Målet er at designe billedbehandlingssystemer, der kan drives af et lille batteri, når det er muligt, "siger Tchouchenkov." Værktøjskæden gør det muligt individuelt at vise og optimere energiforbruget for hver kodefunktion. "
Hundrede gange hurtigere end en avanceret pc

Videobillede fra et af dronens to kameraer. Kredit:Fraunhofer IOSB
Konsortiet arbejdede gennem tre specifikke use cases for at udvikle og teste Tulipp-platformen:Fraunhofer IOSB-forskerholdet adresserede stereokamerabaseret forhindringsdetektion for droner, mens andre projektpartnere arbejdede med registrering af fodgængere i nærheden af en bil og på forbedring af levende kvalitet af røntgenbilleder taget af mobile C-Arms under kirurgiske operationer. I Tulipp porterede de den tilsvarende billedbehandlingssoftware fra C++ til FPGA.
Resultaterne er imponerende:Bearbejdningen, som oprindeligt tog flere sekunder at analysere et enkelt billede på en high-end pc, kan nu køre på dronen i realtid, dvs. nu analyseres cirka 30 billeder i sekundet. "Hastigheden af fodgængerdetekteringsalgoritmen kan øges med en faktor 100:Nu kan systemet analysere 14 billeder pr. Sekund i forhold til et billede hvert syvende sekund. Forøgelse af røntgenbilledkvalitet ved at anvende støjfjernende billedfiltre tillod reducering af intensiteten af stråling under kirurgiske operationer til en fjerdedel af det tidligere niveau, samtidig med at energiforbruget kunne reduceres betydeligt for alle tre anvendelser.
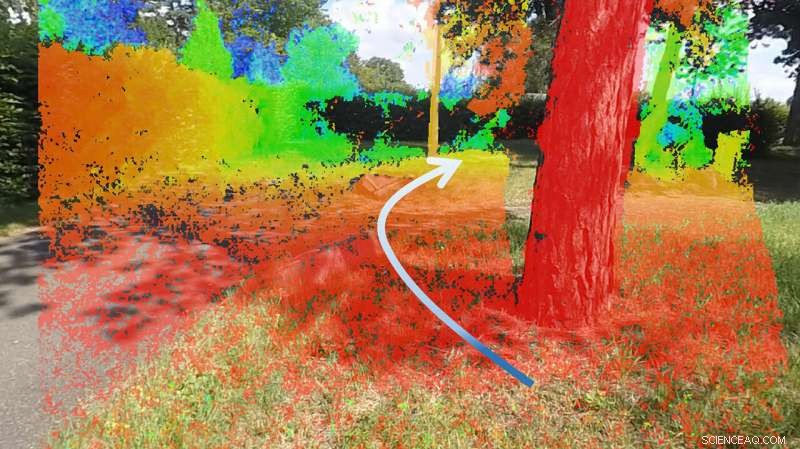
Det samme billede med overlejrede dybdeoplysninger fra stereobilledanalysen, fremhæve tætte forhindringer med rødt. Pilen angiver den resulterende anbefalede undvigelsessti. Kredit:Fraunhofer IOSB
Sidste artikel10 funktioner, vi gerne vil se på den næste iPhone
Næste artikelAI lærer komplekse gensygdomsmønstre
 Varme artikler
Varme artikler
-
 Bærbar hjerne-maskine-grænseflade kunne styre en kørestol, køretøj eller computerTestperson, der har fleksibel trådløs elektronik i overensstemmelse med nakkens bagside, med elektroder i tørt hår under et hovedbånd i stof og en membranelektrode på mastoid, forbundet med tyndfilmka
Bærbar hjerne-maskine-grænseflade kunne styre en kørestol, køretøj eller computerTestperson, der har fleksibel trådløs elektronik i overensstemmelse med nakkens bagside, med elektroder i tørt hår under et hovedbånd i stof og en membranelektrode på mastoid, forbundet med tyndfilmka -
 Ford lukker tre fabrikker, stoppe med at fremstille personbiler i RuslandFord sagde, at den inden udgangen af juni i år vil lukke sin bilsamlingsfabrik i den nordvestlige by Sankt Petersborg Den amerikanske bilproducent Ford vil lukke tre af de fire fabrikker i sit r
Ford lukker tre fabrikker, stoppe med at fremstille personbiler i RuslandFord sagde, at den inden udgangen af juni i år vil lukke sin bilsamlingsfabrik i den nordvestlige by Sankt Petersborg Den amerikanske bilproducent Ford vil lukke tre af de fire fabrikker i sit r -
 Ressourceeffektivt blødt eksoskelet til mennesker med gangbesværKredit:IIT Instituto Italiano di Tecnologia Mange mennesker har nedsat mobilitet i underbenene, men der er få bærbare teknologier, der gør dem i stand til at gå normalt, mens de udfører dagligdags
Ressourceeffektivt blødt eksoskelet til mennesker med gangbesværKredit:IIT Instituto Italiano di Tecnologia Mange mennesker har nedsat mobilitet i underbenene, men der er få bærbare teknologier, der gør dem i stand til at gå normalt, mens de udfører dagligdags -
 Mac -softwaretrusler steg 400% i 2019, mere end Microsoft Windows, siger rapportenKredit:CC0 Public Domain Mac -computere er mindre sikre, end de plejer at være, og mere sårbare over for visse typer softwaretrusler end deres Microsoft Windows -modstykker. Det er påstanden fra
Mac -softwaretrusler steg 400% i 2019, mere end Microsoft Windows, siger rapportenKredit:CC0 Public Domain Mac -computere er mindre sikre, end de plejer at være, og mere sårbare over for visse typer softwaretrusler end deres Microsoft Windows -modstykker. Det er påstanden fra
- Robotter med klæbrige fødder kan klatre op, ned, og rundt omkring
- Hurtigt virkende, farveskiftende molekylær sonde registrerer, når et materiale er ved at svigte
- Amerikansk offentlighed støtter kulstofafgift, og bruge indtægter på vedvarende energi
- USA-Kina samarbejde gør en glimrende start med at optimere lithium til at kontrollere plasma
- Kadaveriris kan ses i Warszawa-baseret forskningsindsats
- Ideer til videnskabsretlige projekter på Fish