


Rebel-robot hjælper forskere med at forstå samarbejde mellem mennesker og maskiner
Kredit:University of Bristol
I et nyt twist på menneske-robotforskning, dataloger ved University of Bristol har udviklet en håndholdt robot, der først forudsiger og derefter frustrerer brugere ved at gøre oprør mod deres planer, derved demonstrere en forståelse af menneskelig hensigt.
I en stadig mere teknologisk verden, samarbejde mellem mennesker og maskiner er et væsentligt aspekt af automatisering. Denne nye forskning viser, at frustrerende mennesker med vilje er en del af processen med at udvikle robotter, der bedre samarbejder med brugerne.
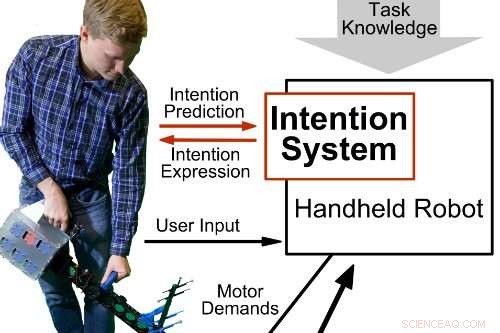
Teamet i Bristol har udviklet intelligente, håndholdte robotter, som udfører opgaver i samarbejde med brugeren. I modsætning til konventionelt elværktøj, som ikke ved noget om de opgaver, de udfører og er fuldt ud under brugernes kontrol, den håndholdte robot har viden om opgaven og kan hjælpe gennem vejledning, finjusteret bevægelse og beslutninger om opgavesekvenser.
Selvom dette hjælper med at udføre opgaver hurtigere og med højere nøjagtighed, brugere kan blive irriterede, når robottens beslutninger ikke er i overensstemmelse med deres egne planer.
Seneste forskning i dette rum af Ph.D. kandidat Janis Stolzenwald og professor Walterio Mayol-Cuevas, fra University of Bristol's Department of Computer Science, udforsker brugen af intelligente værktøjer, der kan påvirke deres beslutninger som svar på brugernes intentioner.
Denne forskning er en ny og interessant drejning på menneske-robot forskning, da den har til formål først at forudsige, hvad brugerne ønsker og derefter gå imod disse planer.
Professor Mayol-Cuevas sagde:"Hvis du er frustreret over en maskine, der er beregnet til at hjælpe dig, dette er lettere at identificere og måle end de ofte uhåndgribelige signaler om menneske-robot-samarbejde. Hvis brugeren er frustreret, når vi instruerer robotten til at gøre oprør mod deres planer, vi ved, at robotten forstod, hvad de ville gøre."
"Ligesom kortsigtede forudsigelser af hinandens handlinger er afgørende for vellykket menneskeligt teamarbejde, Vores forskning viser, at integration af denne evne i samarbejdsbaserede robotsystemer er afgørende for et vellykket menneske-maskine-samarbejde."
Til studiet, forskere brugte en prototype, der kan spore brugerens øjenblik og udlede kortsigtede forudsigelser om tilsigtede handlinger gennem maskinlæring. Denne viden bruges så som grundlag for robottens beslutninger, såsom hvor den skal flyttes.
Bristol-teamet trænede robotten i undersøgelsen ved hjælp af et sæt på over 900 træningseksempler fra en pluk-og-place-opgave udført af deltagerne.
Kernen i denne forskning er vurderingen af intention-forudsigelsesmodellen. Forskerne testede robotten i to tilfælde:lydighed og oprør. Robotten var programmeret til at følge eller ikke adlyde brugerens forudsagte hensigt. At kende brugerens mål gav robotten magten til at gøre oprør mod deres beslutninger. Forskellen i frustrationsreaktioner mellem de to forhold tjente som bevis for nøjagtigheden af robottens forudsigelser, validerer dermed intention-forudsigelsesmodellen.
Janis Stolzenwald, en ph.d. studerende sponsoreret af German Academic Scholarship Foundation og Storbritanniens EPSRC, gennemførte brugerforsøgene og identificerede nye udfordringer for fremtiden. Han sagde:"Vi fandt ud af, at hensigtsmodellen er mere effektiv, når blikdataene kombineres med opgaveviden. Dette rejser et nyt forskningsspørgsmål:hvordan kan robotten hente denne viden? Vi kan forestille os at lære af demonstration eller involvere et andet menneske i opgave."
Som forberedelse til denne nye udfordring, forskerne udforsker i øjeblikket delt kontrol, interaktion og nye applikationer inden for deres studier om fjernsamarbejde gennem den håndholdte robot. En vedligeholdelsesopgave fungerer som et brugereksperiment, hvor en håndholdt robotbruger får assistance gennem en ekspert, der fjernstyrer robotten.
Forskningen bygger på den håndholdte robot designet og bygget af tidligere ph.d. studerende Austin Gregg-Smith, og som er tilgængelig som open source-design via forskerens websted på www.handheldrobotics.org.
Sidste artikelGoogle udråber kvantecomputer-milepæl
Næste artikelMicrosoft og partnere skærper firmwareforsvaret
 Varme artikler
Varme artikler
-
 Facebook øger webstedets sikkerhed med 1, 000 flere britiske medarbejdereFaceook opretter 1, 000 flere job i London, virksomhedens største ingeniørhub uden for USA Facebook sagde tirsdag, at det planlægger at oprette 1, 000 flere London-baserede job i år for at forbedr
Facebook øger webstedets sikkerhed med 1, 000 flere britiske medarbejdereFaceook opretter 1, 000 flere job i London, virksomhedens største ingeniørhub uden for USA Facebook sagde tirsdag, at det planlægger at oprette 1, 000 flere London-baserede job i år for at forbedr -
 Siemens investerer 1 mia. Euro i Brasilien for at slippe væksten løsDen tyske ingeniørgigant Siemens skal tredoble sine investeringer i Brasilien, da landets økonomi vender tilbage til vækst Den tyske industrikoncern Siemens offentliggjorde onsdag planer om at inv
Siemens investerer 1 mia. Euro i Brasilien for at slippe væksten løsDen tyske ingeniørgigant Siemens skal tredoble sine investeringer i Brasilien, da landets økonomi vender tilbage til vækst Den tyske industrikoncern Siemens offentliggjorde onsdag planer om at inv -
 Køkkener bliver klogere på CES tech show, endnu ikke i mange hjemJoel Gamoran, af Yummly, demonstrerer Whirlpool Yummly -temperaturmåleren ved CES Unveiled -medieeksempelbegivenheden, Søndag, 5. januar, 2020, i Las Vegas. Det smarte termometer består af en sonde og
Køkkener bliver klogere på CES tech show, endnu ikke i mange hjemJoel Gamoran, af Yummly, demonstrerer Whirlpool Yummly -temperaturmåleren ved CES Unveiled -medieeksempelbegivenheden, Søndag, 5. januar, 2020, i Las Vegas. Det smarte termometer består af en sonde og -
 Et nyt værktøj til at hjælpe en milliard mennesker i fare på grund af manglende adgang til køli…Kredit:SEforAll Vurderingen af køling til alle behov er blevet lanceret i dag, Torsdag, 7. november for at hjælpe regeringer, ikke-statslige organisationer og udviklingsinstitutioner til nøjagti
Et nyt værktøj til at hjælpe en milliard mennesker i fare på grund af manglende adgang til køli…Kredit:SEforAll Vurderingen af køling til alle behov er blevet lanceret i dag, Torsdag, 7. november for at hjælpe regeringer, ikke-statslige organisationer og udviklingsinstitutioner til nøjagti