


Modellering og simulering af komplekse dynamiske muskuloskeletale arkitekturer
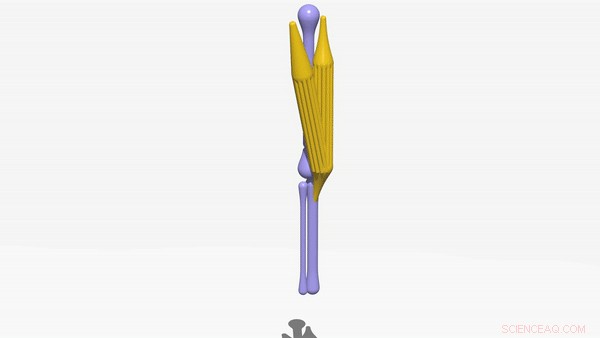
Simuleringsresultat af et albueled, der udfører isokinetisk ledfleksion. Humerus, ulna og radius er modelleret med stive filamenter i lilla. Sener er modelleret med tilspidsede filamenter i gult. To bicepshoveder bestående af 36 filamenter udfører maksimal frivillig kontraktion. Grænseforhold anvendes for at sikre en konstant vinkelhastighed. Kredit:Nature Communications, doi:10.1038/s41467-019-12759-5
Livsforskere og bioingeniører studerer naturlige systemer og organismer for at forstå deres biofysiske mekanismer, for at drive biomimetiske tekniske applikationer i laboratoriet. I en nylig rapport om Naturkommunikation , Xiaotian Zhang og kolleger i afdelingerne for maskinteknik og supercomputing -applikationer i USA præsenterede en numerisk tilgang til simulering af muskuloskeletale arkitekturer. Metoden baserede sig på samling af heterogene aktive og passive Cosserat-stænger (en deformerbart rettet stangbaseret kurve) i dynamiske strukturer til model af knogler, sener, ledbånd, fibre og muskelforbindelse. De demonstrerede anvendelser af teknikken ved at løse en række problemer i biologiske og bløde robotscenarier på tværs af mange miljøer og skalaer. Teamet konstruerede bio-hybrid robotter i millimeterskala og rekonstruerede komplekse bevægeapparater. Metoden er alsidig og tilbyder en ramme til at hjælpe fremadrettet og omvendt bioingeniørdesign til grundlæggende opdagelser af levende organismeres funktioner.
Muskuloskeletale systemer indeholder knogler, muskler, sener og ledbånd til at fungere sammen i native biologiske systemer. Spændende nok, sådanne arkitekturer indeholder en uadskillelig forbindelse mellem aktivering og kontrol, topologi og mekanik på grund af ikke -lineære bestanddele. I skarp kontrast til robotter med stiv krop, bløde biologiske væsner kan implementere deformationer og strukturelle ustabilitet til at fungere inden for komplekse, ustrukturerede og dynamiske miljøer. Biologiske muskuloskeletale arkitekturer besidder en iboende fordeling, blødhed og overholdelse af at outsource kontrolopgaver til en række rum. Denne ejendom danner grundlag for et spirende paradigme inden for biologisk inspireret robotik kendt som morfologisk beregning eller mekanisk intelligens. Overvejelserne har ført til en række eksperimentelle fremskridt inden for blød robotik med kunstige kompatible materialer til dannelse af bløde bio-hybridrobotter. På trods af eksperimentelle fremskridt inden for området, bestræbelser på at modellere og simulere dynamiske muskuloskeletale arkitekturer på tværs af biologiske og syntetiske strukturer mangler stadig at blive gennemført.
Simulering af det menneskelige albueled
Zhang et al. demonstrerede først en metode til at omfatte fuldstændig deformationsdynamik, såsom bøjning, vride, forskydning og strækning involveret i biologiske arkitekturer. For det, de byggede på tidligere arbejde med cosserat -stænger for at etablere en muskuloskeletal modelleringsmetode til realistisk simulering af aktive, heterogene biologiske layout i en trinvis tilgang til at syntetisere og replikere levende arkitekturer med biologiske lag af kompleksitet til avancerede biomimetiske applikationer. Arbejdet gav dem mulighed for at replikere biologiske systemer ved at efterligne den underliggende biomekanik og gav adgang til at studere og forstå biofysiske funktioner af biologiske organismer i silicium. Undersøgelsen viste anvendelser af stangmodeller til at spille en værdifuld rolle, mens de modellerede komplekse aktive systemer til biomimetiske arkitekturer.
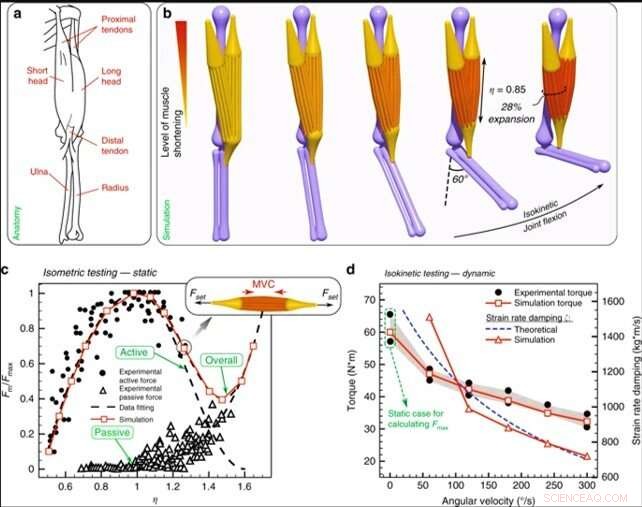
Menneskelig albue aktivering. (a) Albue anatomi. (b) Simulering af en albue sammensat af tre knogler (humerus, ulna og radius) og to hoveder af biceps (kort og langt hoved), der udfører en fuldstændig bøjning. (c) Eksperimentelle data og simuleringer for aktiv og passiv kraft normaliseret med spidskraft (Fm/Fmax) under den isometriske øvelse (Fset efterligner den modstand, musklen støder på og resulterer i dens ligevægtslængde η). (d) Eksperimentelle og simulerende drejningsmomentmålinger af albueleddet (vinklet ved 60 °), der udfører maksimal isokinetisk koncentrisk bøjning ved forskellige vinkelhastigheder sammen med den tilsvarende samlede muskelbelastningsdæmpning ζ. De numerisk bestemte ζ sammenlignes derefter med teoretiske skøn baseret på Hill -modellen. Kredit:Nature Communications, doi:10.1038/s41467-019-12759-5
Under den første biomimetiske simulering, Zhang et al. brugte et menneskeligt albueled med muskler, sener og knogler til at illustrere stangsamlinger, der er kortlagt til fysiologi, dynamik og morfologi. For eksempel, albueleddet viste bløde og stive egenskaber, forenklet dynamik og reduceret konfigurationsplads. Analysen gav dem mulighed for at verificere og kalibrere modellen baseret på let tilgængelige anatomiske og biomekaniske data for at relatere til Hill -modellen. Repræsentationens detaljeringsniveau gav dem mulighed for at imødekomme menneskelige patientspecifikke kinesiologiske behov og praktisk talt rekonstruere en 3D-kopi af et menneskeligt albueled ved hjælp af isometriske og isokinetiske tests, der kan anvendes til knoglevævsteknik. Forskerne kunne modellere, kalibrere og validere en individuel muskelenheds aktivering, hvor resultatet gengav dynamik og morfologi i et biologisk system. Den nuværende modelleringsmetode præsenterede nøglefunktioner, der adskiller den fra Hill -modellen, at inkludere (a) individuelle stænger til selektiv rekruttering for at efterligne en skade, og (b) kompatible muskler, der kan bøje, vride og skære realistisk til dynamiske kræfter på tværs af hele strukturen eller inden for miljøet.
Engineering bio-hybrid robotter
I det næste forsøg, teamet konstruerede biohybridrobotter ved hjælp af deres beregningsløser til at guide design og fremstilling af svømning og gående biohybridbots i millimeterskalaen. For at undersøge robotternes svømningsadfærd, de løste først problemer ved hjælp af numerisk modellering og simuleringer af en tidligere etableret bio-hybrid flagella. For det, de skabte en nøjagtig kopi af den originale svømmer og modellerede polydimethylsiloxan (PDMS) substrat for at efterligne eksperimentel geometri og materialegenskaber med levende klyngede celler modelleret som en lille, blødt og kontraktilt filament forbundet til substratet. De kvalitative og kvantitative observationer af svømmebevægelse mellem simuleringen og eksperimentet passede godt sammen.
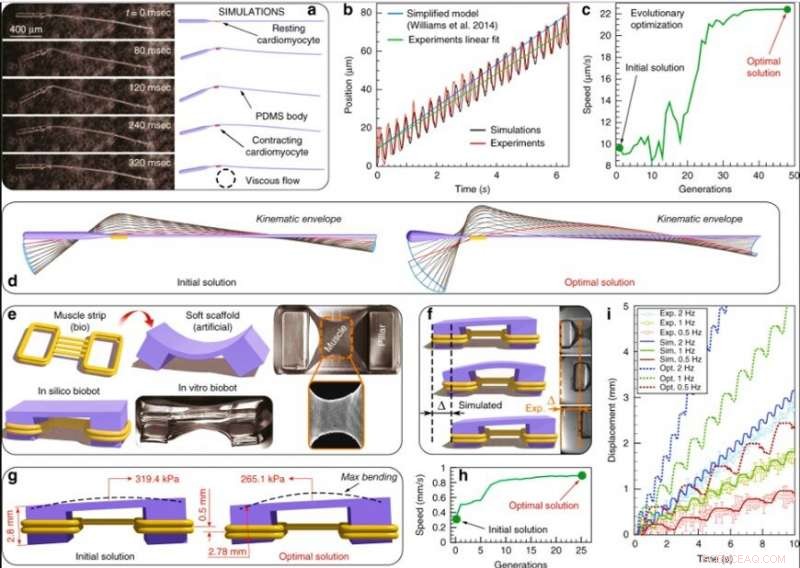
Bio-hybrid robotdesign. (a) En-til-en sammenligning af robotten med eksperimentelle fotografier på forskellige stadier inden for en svømmecyklus. (b) Axial position af robotens center overvåget over mere end 20 cyklusser sammenlignet med eksperimentelle data. (c) Optimeringsforløb:Konvergens til optimal løsning observeres efter 48 generationer. Optimering blev begrænset med hovedlængde inden for [0, 1.927] mm, hovedradius inden for [4, 40] μm, haleradius inden for [4, 6,5] μm og celleplacering på ethvert tidspunkt langs halen. Botens længdemål er fastgjort til L =1,927 mm, så halelængden kan udledes af hovedlængden. Parameterintervallerne er bestemt til at tage højde for den faktiske fremstillingsevne. (d) Visualisering af både det originale og det optimale design, der viser konfigurationer i hvile- og midtlinjekinematiske konvolutter over en periode. Originale svømmerdetaljer:Underlaget er modelleret med 424 μm langt hoved og 1503 μm lang hale med radius henholdsvis 20μm og 7μm. Massefylde ρ =0,965 gcm − 3, Youngs modul E =3,86MPa, bøjningsstivhed EI =2,427 × 10−9Nmm2, masse m =7,364 × 10−7g er indstillet. Kontraktilcellen er modelleret med radius 10μm og længde 100μm. Cellen er indstillet til at producere en kontraherende kraft F =σmA =12μN med slagfrekvens f =3,6Hz23. Væsken har dynamisk viskositet μ =1,2 × 10−3Pa⋅s. Optimerede svømmerdetaljer:substratet har en længde og radius på 190μm og 32,3μm, henholdsvis. Den kontraktile celle er fastgjort 190μm væk fra hovedet og halen er 4,3μm tyk. (e) Overordnet design af rollatoren med gule elementer, der repræsenterer muskelringe og lilla elementer, der repræsenterer skelettet. Eksperimentelle billeder tilpasset fra tidligere undersøgelser. (f) Simuleringer versus eksperimenter:Botforskydning over 2 sekunder for aktiveringsfrekvensen 1 Hz. (g) Visualisering af indledende og optimeret design af rollatoren. (h) Optimeringskursus konvergerer efter 25 generationer. Optimering blev begrænset med skeletets Youngs modul [250–350] kPa, længden af den kortere søjle [2,4–3,4] mm og placering af muskelstrimmel [0,5–3] mm (afstand fra jorden), som alle er valgt i henhold til begrænsninger ved fremstillbarhed. (i) Dynamisk adfærd for simulerede (faste linjer) og eksperimentelle (markører med fejlstænger) rollator med muskelsammentrækning ved forskellige frekvenser, og sammenligning af gangpræstation mellem indledende (faste linjer) og yderligere optimeret design (stiplede linjer). Kredit:Nature Communications, doi:10.1038/s41467-019-12759-5
Efter modellering og optimering af bio-hybrid svømmeren, de forsøgte at beregne en bio-hybrid rollator som tidligere udviklet til at danne den hurtigste motil biologiske maskine til dato af Pagan-Diaz et al., baseret på en foregående bio-hybrid robot. Strukturelt, modellen Pagan-Diaz indeholdt et asymmetrisk hydrogel-stillads og skeletmuskelvæv, der lignede muskel-sen-knogle-forhold in vivo og opererede i et opløsningsbad i laboratoriet. Eksperimentelt, de suspenderede musklerne og chokerede dem elektrisk for at forårsage sammentrækning af bevægelse via asymmetri og friktion.
Zhang et al. simulerede denne arkitektur i det nuværende arbejde, at designe et nyt stillads og topologiske muskelarrangementer af bot. Den nye muskelvævstopologi indeholdt et tyndt strimmelafsnit, der forbinder to ringe viklet omkring skeletben for at overføre muskelkontraktionskræfter, som de testede ved hjælp af benchmarkundersøgelser. Zhang et al. eksperimentelt demonstreret beregningsplanen med Pagan-Diaz-modellen til at konstruere en ny bio-bot med dobbelt så hurtig hastighed som den originale bio-hybrid robot; med god overensstemmelse observeret i simuleringen. Forskergruppen viste potentiale i den beregningsmæssige tilgang til at indkapsle fysik i celle- og muskeldrevne bløde robotsystemer til de ønskede applikationer til at konstruere mere fleksible prototyper.

Slidende bevægelse af muskuloskeletale slangemodellen med fire muskelgrupper. Muskelgruppearrangementerne er optimeret til den hurtigste fremadgående hastighed. Muskelgruppernes farve angiver muskelkontraktionsniveau. Kredit:Nature Communications, doi:10.1038/s41467-019-12759-5.
Engineering slithering slanger
Holdet benyttede derefter den numeriske fremgangsmåde, der var udtænkt i undersøgelsen for at lette bio-hybrid robotfremstillingsbarhed og forstå biomekanik. Bioingeniører havde tidligere udført flere eksperimenter på slangebevægelse for at bygge målrobotreplikater ved hjælp af servomotorer (roterende aktuatorer). I det foreliggende eksperiment, de udviklede en fuldstændig blød elastisk slange, der er bioinspireret af ægte slanger, men aktiveret effektivt med flere muskel-senegrupper for at opnå en jævn bølgebevægelse. Forskergruppen viste, at mens biologiske slanger havde flere muskler til at orkestrere gangarter og kropsdeformationer, modellen krævede kun få funktioner for at glide og effektivt glide fremad.
For optimalt design, forskerne koblede deres beregningsløser med algoritmen Covariance Matrix Adaptation-Evolution Strategy (CMA-ES) til at identificere placeringer og aktiveringsmønstre for maksimal hastighed fremad. Zhang et al. sammenlignede og verificerede resultaterne med referencesimuleringer og eksperimentelle optagelser. Teamet havde primært til formål at afsløre skjulte arkitektoniske designprincipper og afsløre deres funktion til tekniske formål. De orkestrerede omhyggeligt distribueret aktivering for glatte realistiske gangarter i skarp kontrast til stive slangrobot -modstykker. Forskerne implementerede også en ramme for at forenkle, afprøve og bruge biomekaniske principper for komplekse biologiske systemer til at skabe en realistisk glidende, hurtig, blød-robotisk slange baseret på et par enkle aktuatorer.
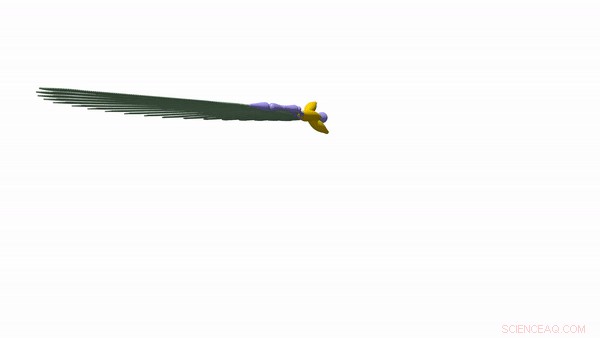
Set forfra et par vinger bestående af 6342 filamenter, hvor grønne filamenter angiver fjerene. En initieringsproces løfter vingerne fra flad position og efterfølges af et enkelt kraftnedslag og opadgående slag under startfasen. Kredit:Nature Communications, doi:10.1038/s41467-019-12759-5.
Engineering fjervinger
For at demonstrere en mere kompleks bevægelsesstrategi, der omfatter yderligere biologiske strukturer med kritiske funktioner, teamet udviklede en fjer, muskuloskeletale fuglevinge i silico. Bioingeniører havde tidligere udført en række undersøgelser for at forstå biofysiske træk ved fugleflyvning fra muskelaktiveringsmønstre til fjerens biomekanik. I det nuværende arbejde, Zhang et al. betragtede en dues dynamiske vingestruktur og rekonstruerede fjerene i silico med bøjningsstivhed, i overensstemmelse med tidligere undersøgelser.
I alt, de forbandt 19 fjer til den beregningsmæssige vingemodel i overensstemmelse med homedues biologiske data. De inkluderede fire muskler forbundet med skulder- og albueleddene til styring af vingens aktivering og morphing i forhold til den menneskelige albueleddemodel. Selvom denne først-i-undersøgelsesmodel ikke indfangede kompleks aerodynamik forbundet med flappende flyvning, det gav et foreløbigt skøn. Teamet gengav kinematikken for morfende vinger under start og baserede muskelaktiveringsmønstrene på tidligere erhvervede eksperimentelt registrerede elektromyografi (EMG) signaler.
På denne måde, Xiaotian Zhang og et team af forskere præsenterede en ny metode til at samle heterogene, aktive og passive cosserat stænger til at simulere dynamisk, muskuloskeletale arkitekturer, der kan undergå deformation for at lette biomimetisk bevægelse. Fremgangsmåden adresserede en eksisterende mangel på ingeniørteknikker inden for blød robotik til at udfylde hullet mellem stive-body-modellering og high-fidelity endelige-element-metode (FEM) simuleringer.
Ved hjælp af gunstige funktioner udviklet i undersøgelsen, forskergruppen konstruerede bløde kropssystemer til at løse en række problemer i forhold til blød robotik og komplekse biologiske strukturer i forskellige miljøer. Det nye arbejde viste alsidigheden i tilgangen til at etablere en lovende strategi for vidtrækkende anvendelser på tværs af bioingeniør biologisk inspirerede strukturer til at opdage de underliggende træk ved levende organismer.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Warren siger, at tech -giganter har for meget magt, har brug for brudDemokratiske præsidentkandidat senator Elizabeth Warren, D-masse., venter på at tale med lokale beboere fredag, 8. marts 2019, i Queens bydel i New York. (AP Photo/Frank Franklin II) Den demokrati
Warren siger, at tech -giganter har for meget magt, har brug for brudDemokratiske præsidentkandidat senator Elizabeth Warren, D-masse., venter på at tale med lokale beboere fredag, 8. marts 2019, i Queens bydel i New York. (AP Photo/Frank Franklin II) Den demokrati -
 En kontaktlinse, der kan vise, når blodsukkerniveauet er højtOversigt over den trådløst genopladelige smarte kontaktlinse. Kredit:Jang-Ung Park, Yonsei Universitet Et team af forskere tilknyttet flere institutioner i Republikken Korea har udviklet en kontak
En kontaktlinse, der kan vise, når blodsukkerniveauet er højtOversigt over den trådløst genopladelige smarte kontaktlinse. Kredit:Jang-Ung Park, Yonsei Universitet Et team af forskere tilknyttet flere institutioner i Republikken Korea har udviklet en kontak -
 Biologisk inspireret hud forbedrer robotternes sensoriske evnerHver celle i denne kunstige hud udviklet af forskere ved det tekniske universitet i München (TUM) er udstyret med en mikroprocessor og sensorer til at registrere kontakt, acceleration, nærhed og tempe
Biologisk inspireret hud forbedrer robotternes sensoriske evnerHver celle i denne kunstige hud udviklet af forskere ved det tekniske universitet i München (TUM) er udstyret med en mikroprocessor og sensorer til at registrere kontakt, acceleration, nærhed og tempe -
 Zuckerberg siger, at den amerikanske regerings passivitet tillod falske nyheder at sprede sigKredit:CC0 Public Domain Facebook -chef Mark Zuckerberg sagde onsdag, at manglende handling fra de amerikanske myndigheders side på falsk politisk indhold på platformen efter det amerikanske valg
Zuckerberg siger, at den amerikanske regerings passivitet tillod falske nyheder at sprede sigKredit:CC0 Public Domain Facebook -chef Mark Zuckerberg sagde onsdag, at manglende handling fra de amerikanske myndigheders side på falsk politisk indhold på platformen efter det amerikanske valg
- Forskere udvikler metalloenzymbiosensor til overvågning af ethylenindhold i frugter
- Sådan fjernes forurenende stoffer fra smokestacks
- Nanoquakes undersøger nyt 2-D materiale
- Forskere identificerer 15 twisters, der ramte prærierne på Canada Day
- Miljøproblemer forårsaget af skovrydning af tropiske regnskove
- At tildele medarbejdere til nye netværk øger bæredygtigheden