


Biologisk inspireret hud forbedrer robotternes sensoriske evner

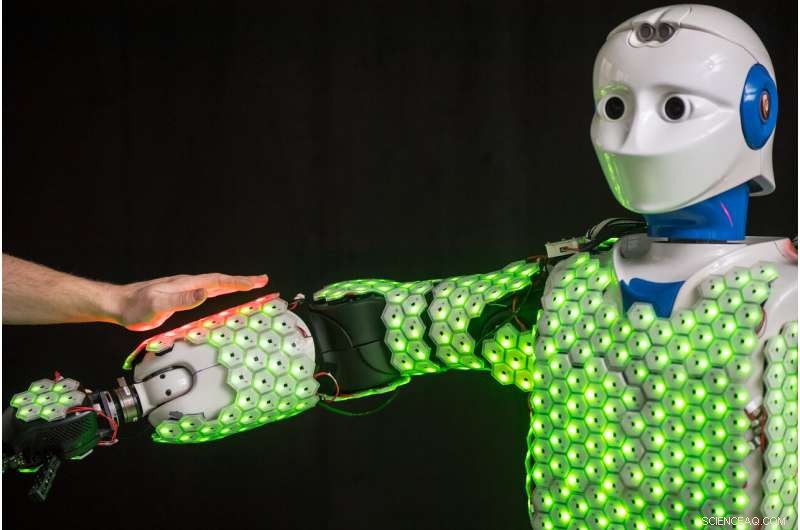
Hver celle i denne kunstige hud udviklet af forskere ved det tekniske universitet i München (TUM) er udstyret med en mikroprocessor og sensorer til at registrere kontakt, acceleration, nærhed og temperatur. Nye kontrolalgoritmer gjorde det for første gang muligt at påføre kunstig hud på en robot i menneskestørrelse. Kredit:Astrid Eckert/TUM
Følsom syntetisk hud gør robotter i stand til at fornemme deres egen krop og omgivelser - en afgørende evne, hvis de skal være i tæt kontakt med mennesker. Inspireret af menneskelig hud, et hold ved det tekniske universitet i München (TUM) har udviklet et system, der kombinerer kunstig hud med kontrolalgoritmer og brugt det til at skabe den første autonome humanoide robot med kunstig hud på hele kroppen.
Den kunstige hud, der er udviklet af prof. Gordon Cheng og hans team, består af sekskantede celler på størrelse med en mønt på to euro (dvs. cirka en tomme i diameter). Hver er udstyret med en mikroprocessor og sensorer til at registrere kontakt, acceleration, nærhed og temperatur. Sådan kunstig hud gør robotter i stand til at opfatte deres omgivelser meget mere detaljeret og med mere følsomhed. Dette hjælper dem ikke kun med at bevæge sig sikkert. Det gør dem også mere sikre, når de opererer i nærheden af mennesker og giver dem mulighed for at forudse og aktivt undgå ulykker.
Selve hudcellerne blev udviklet for omkring 10 år siden af Gordon Cheng, Professor i kognitive systemer ved TUM. Men denne opfindelse afslørede kun sit fulde potentiale, når den blev integreret i et sofistikeret system som beskrevet i det seneste nummer af tidsskriftet Proceduren for IEEE .
Mere computerkapacitet gennem begivenhedsbaseret tilgang
Den største hindring i udviklingen af robotskin har altid været computerkapacitet. Menneskelig hud har omkring 5 millioner receptorer. Bestræbelserne på at implementere kontinuerlig behandling af data fra sensorer i kunstig hud løber snart over grænser. Tidligere systemer blev hurtigt overbelastet med data fra blot et par hundrede sensorer.
For at overvinde dette problem, ved hjælp af en neuroteknisk tilgang, Gordon Cheng og hans team overvåger ikke hudcellerne løbende, men snarere med et begivenhedsbaseret system. Dette reducerer forarbejdningsindsatsen med op til 90 procent. Tricket:De enkelte celler transmitterer kun information fra deres sensorer, når værdierne ændres. Dette svarer til den måde, det menneskelige nervesystem fungerer på. For eksempel, vi føler en hat, da vi først tager den på, men vi vænner os hurtigt til fornemmelsen. Der er ingen grund til at bemærke hatten igen, før vinden blæser den af vores hoved. Dette gør vores nervesystem i stand til at koncentrere sig om nye indtryk, der kræver en fysisk reaktion.
Sikkerhed selv i tilfælde af tæt kropskontakt
Med den begivenhedsbaserede tilgang, Prof. Cheng og hans team er nu lykkedes med at påføre kunstig hud på en autonom robot i menneskestørrelse, der ikke er afhængig af nogen ekstern beregning. H-1 robotten er udstyret med 1260 celler (med mere end 13000 sensorer) på sin overkrop, arme, ben og endda fodsålerne. Dette giver den en ny "kropslig fornemmelse". For eksempel, med sine følsomme fødder, H-1 er i stand til at reagere på ujævne gulvoverflader og jævn balancere på et ben.
Med sin specielle hud, H-1 kan endda give en person et kram sikkert. Det er mindre trivielt, end det lyder:Robotter kan udøve kræfter, der ville skade et menneske alvorligt. Under et kram, to kroppe rører hinanden mange forskellige steder. Robotten skal bruge denne komplekse information til at beregne de rigtige bevægelser og udøve de korrekte kontakttryk. "Dette er måske ikke så vigtigt i industrielle applikationer, men inden for områder som sygepleje, robotter skal være designet til meget tæt kontakt med mennesker, " forklarer Gordon Cheng.
Kredit:Technical University München
Alsidig og robust
Gordon Chengs robotskinsystem er også yderst robust og alsidigt. Fordi huden består af celler, og ikke et enkelt stykke materiale, det forbliver funktionelt, selvom nogle celler holder op med at fungere. "Vores system er designet til at fungere problemfrit og hurtigt med alle slags robotter, " siger Gordon Cheng. "Nu arbejder vi på at skabe mindre hudceller med potentiale til at blive produceret i større antal."
 Varme artikler
Varme artikler
-
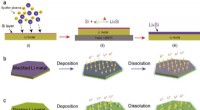 En ny tilgang til at forbedre batteriets ydeevneSkematisk fremstilling af fremstillingsprocessen og den elektrokemiske opførsel af LixSi-modificeret lithiumfolie. Kredit:UNIST Ny teknologisk udvikling fra UNIST-forskere lover at øge ydeevnen af
En ny tilgang til at forbedre batteriets ydeevneSkematisk fremstilling af fremstillingsprocessen og den elektrokemiske opførsel af LixSi-modificeret lithiumfolie. Kredit:UNIST Ny teknologisk udvikling fra UNIST-forskere lover at øge ydeevnen af -
 Tencent Music-aktien stiger på første handelsdagTao Sang Tong, centrum, Formand for Tencent Music Entertainment, og medpræsident Guomin Xie, ret, slå på klokken på New York Stock Exchange for at markere det kinesiske selskabs børsnotering, Onsdag,
Tencent Music-aktien stiger på første handelsdagTao Sang Tong, centrum, Formand for Tencent Music Entertainment, og medpræsident Guomin Xie, ret, slå på klokken på New York Stock Exchange for at markere det kinesiske selskabs børsnotering, Onsdag, -
 Vil æblers rødder i Kina holde fast midt i en politisk storm?Mens Kina kan tage sigte på Apple som gengældelse for amerikanske tiltag, eksperter mener, at virksomhedens størrelse, cache, og år brugt på at dyrke forretningsforbindelser i Kina burde beskytte det
Vil æblers rødder i Kina holde fast midt i en politisk storm?Mens Kina kan tage sigte på Apple som gengældelse for amerikanske tiltag, eksperter mener, at virksomhedens størrelse, cache, og år brugt på at dyrke forretningsforbindelser i Kina burde beskytte det -
 Strømgenererende materiale til organisk solcelleKredit:CC0 Public Domain Toyobo Co., Ltd. og det franske regerings forskningsinstitut CEA er lykkedes med at lave forsøgsorganiske fotovoltaiske (OPV) små celler på et glassubstrat med verdens bed
Strømgenererende materiale til organisk solcelleKredit:CC0 Public Domain Toyobo Co., Ltd. og det franske regerings forskningsinstitut CEA er lykkedes med at lave forsøgsorganiske fotovoltaiske (OPV) små celler på et glassubstrat med verdens bed
- Gør koldt dig søvnig?
- Qatar underskriver 470 millioner dollars solenergiaftale
- Forskning:Sammenhæng mellem øget atmosfærisk dampunderskud og verdensomspændende tab af vegetati…
- Idéer til at lave en 3D-model af en celle
- Forskere udvikler molekylært LEGO-kit til at skabe nano-terninger
- Forudsiger forsinket ustabilitet i viskoelastiske faste stoffer