


En samlende tilgang til bekæmpelse af flyvende robotinsekter
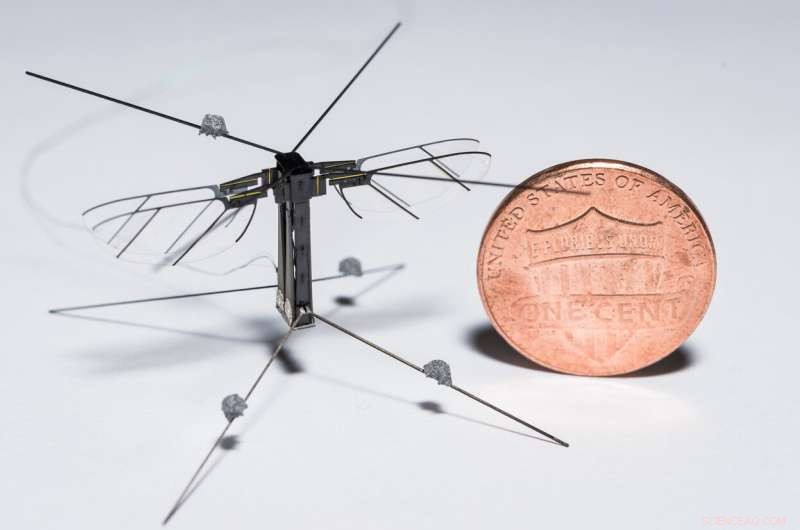
Flyvende robotinsekt Bee+. Kredit:Xiufeng Yang.
Et af de vigtigste problemer, forskere står over for inden for mikrorobotik, er at designe og implementere pålidelige controllere til mikroluftfartøjer i insektskala (FWMAV'er), som er små flyvende robotter, der typisk er inspireret af insekter. Faktisk, selvom disse robotter i insektstørrelse kunne have mange nyttige applikationer, for eksempel, at hjælpe mennesker i eftersøgnings- og redningsmissioner eller i landbruget, at udvikle controllere, der matcher deres størrelse og struktur, har indtil videre vist sig at være svært.
Forskere ved University of Southern California (USC) har for nylig gennemført en undersøgelse, der undersøger udfordringerne ved at designe disse controllere. I deres papir, forudgivet på arXiv, de introducerer en ny samlende tilgang, der kunne informere udviklingen af mere effektive teknikker til kontrol af FWMAV'er. Forskerne bag undersøgelsen er en del af det autonome mikrorobotsystemlaboratorium (AMSL), som er arvtageren til en forskningslinje, der startede på UC Berkeley for mere end 20 år siden, fortsatte på Harvard fra 2005 og ankom til USC i 2013.
"Vi, som et hold, deler den samme drøm som mange i mikrorobottersamfundet; visionen om at skabe fuldt autonome kunstige insekter, der kan fungere intelligent i meget ustrukturerede miljøer, " Prof. Nestor O Perez-Arancibia, den primære investigator (PI) for undersøgelsen, fortalte TechXplore. "Personligt, Jeg er inspireret af naturen. Vores maskiner, herunder Bee+, hvilket er et fantastisk stykke ingeniørkunst, halter stadig bagefter rigtige insekter med hensyn til kunstflyvning, aktivering, fornemmelse, regnekraft, etc."
Perez-Arancibia har forsket i mikrorobotsystemer i flere år. Han mener, at alle menneskeskabte maskiner i sidste ende kunne blive forbedret, hvis man henter inspiration fra naturen, for eksempel ved at observere og replikere biers adfærd eller egenskaber, sommerfugle og myg.

Flyvende robotinsekt Bee+. Kredit:Xiufeng Yang.
I deres undersøgelse, Perez-Arancibia og hans kolleger undersøgte bekæmpelsen af flyvende insekter ved hjælp af to forskellige eksperimentelle platforme:en bi-lignende to-vinget robot og den fire-vingede Bee+ mikrorobot udviklet ved USC. I en række eksperimenter, de var i stand til at demonstrere, at en teknik, der anvender quaternion-koordinater til attitudekontrol, som er designet til at styre ubemandede køretøjer med fire rotorer, kan anvendes til at drive begge disse robotinsekter.
"Vi var i stand til at forenkle noget, som mange forskere ser som meget svært, " sagde Perez-Arancibia. "Jeg kan godt lide at tro, at dette er et tilfælde, hvor intelligent modellering (dvs. ved at se på problemet fra et nyt og 'bedre' perspektiv), vi kan forstå og analysere tilsyneladende vanskelige komplekse fænomener, der kan hjælpe os med at udvikle bedre robotdesign, især med hensyn til aerodynamisk kraftgenerering, mekanisme konfiguration og aktivering."
Resultaterne af testene udført af Perez-Arancibia og hans kolleger antyder, at den generiske strategi, de indførte, kan bruges til at kontrollere forskellige typer kunstige insekter, der har nogle fælles egenskaber. Mens de specifikt demonstrerede effektiviteten af denne strategi på en tovinget robot og den firevingede Bee+ robot, det kan potentielt også anvendes på andre insektlignende mikrorobotter.
Perez-Arancibia mener, at ved at følge en kontrolmetode på højt niveau, der afkobler problemerne med aktivering og flyvekontrol, det er muligt at identificere generelle algoritmer, der kan anvendes på flere platforme. For eksempel, denne tilgang kunne give forskere mulighed for at udvikle nye algoritmer til aerobatisk flyvning ved hjælp af 19-grams kvadrotorer, som efterfølgende kunne implementeres på en 95-milligram, firefløjet Bee+.
"Dette er relevant, fordi efterhånden som robotflyers bliver mindre, de bliver også sværere at fremstille, vanskeligere at håndtere og dyrere, sagde Perez-Arancibia. Derfor som vist i vores avis, det faktum, at den samme tilgang kan anvendes til at syntetisere controllere til platforme med vægtforskelle på så store som to størrelsesordener, er signifikant og relevant både fra forskningsmæssige og praktiske perspektiver. "
I fremtiden, den tilgang, der blev introduceret af dette team af forskere ved USC, kunne informere design og implementering af nye controllere til insektlignende mikrorobotter. Ud over, i løbet af de næste par måneder, Perez-Arancibia og hans kolleger vil arbejde på et andet projekt med det formål at skabe det allerførste helt autonome subgram flyvende kunstige insekt.
"I øjeblikket, den vigtigste begrænsning, der har forhindret mikrorobotter i at opnå autonom flyvning på sub-gram-skalaen, er de ekstremt lave energitætheder af elektriske batterier, " sagde Perez-Arancibia. "Vi vil opnå autonomi ved at bruge kunstige muskler drevet af katalytiske reaktioner."
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Interview:Airbus er klar til pilotløse jetfly – er du?I denne fredag, 14. juni, 2019 filbillede, Chief Commercial Officer i Airbus, Christian Scherer, taler til medierne under en briefing forud for Paris Air Show i Paris. Chefsælgeren for Airbus siger, a
Interview:Airbus er klar til pilotløse jetfly – er du?I denne fredag, 14. juni, 2019 filbillede, Chief Commercial Officer i Airbus, Christian Scherer, taler til medierne under en briefing forud for Paris Air Show i Paris. Chefsælgeren for Airbus siger, a -
 Forfalskede og piratkopierede varer repræsenterer 3,3 % af den globale handel:rapportSalget af forfalskede og piratkopierede varer er steget, svarende til 3,3 procent af den globale handel, ifølge en ny rapport Det globale salg af forfalskede og piratkopierede varer er steget til
Forfalskede og piratkopierede varer repræsenterer 3,3 % af den globale handel:rapportSalget af forfalskede og piratkopierede varer er steget, svarende til 3,3 procent af den globale handel, ifølge en ny rapport Det globale salg af forfalskede og piratkopierede varer er steget til -
 Under pres for at ændre sig, Ford genopfinder sig selvFord vil gennemføre en større omlægning af sine europæiske aktiviteter for at øge rentabiliteten Kæmper med en faldende aktiekurs og trægt salg, Den amerikanske bilgigant Ford tog i denne uge skri
Under pres for at ændre sig, Ford genopfinder sig selvFord vil gennemføre en større omlægning af sine europæiske aktiviteter for at øge rentabiliteten Kæmper med en faldende aktiekurs og trægt salg, Den amerikanske bilgigant Ford tog i denne uge skri -
 Æblers næste iPhones vil tage designelementer fra den nyeste iPad Pro, siger rapportenKredit:Apple Apple har angiveligt planer om at introducere mindst fire nye iPhones i år, og nogle er inspireret af den seneste iPad Pro. Premium-versionerne af teknologigigantens kommende enheder
Æblers næste iPhones vil tage designelementer fra den nyeste iPad Pro, siger rapportenKredit:Apple Apple har angiveligt planer om at introducere mindst fire nye iPhones i år, og nogle er inspireret af den seneste iPad Pro. Premium-versionerne af teknologigigantens kommende enheder
- Undersøgelse tvinger en nytænkning af Ibizas befolkningshistorie
- Hvilken partikelformig luftforurening udgør den største sundhedsrisiko?
- Sådan beregnes diagonal afstand mellem hjørner af en Square
- 3 himmelundersøgelser gennemført som forberedelse til Dark Energy Spectroscopic Instrument
- Skubbede Jupiter Venus ind i et løbsk drivhus?
- De økonomiske fordele ved illegal immigration opvejer omkostningerne, viser undersøgelse