


Robotter er optimeret til kedelige, gentagne opgaver. Kan de automatiseres til mere komplekse arbejdsområder?
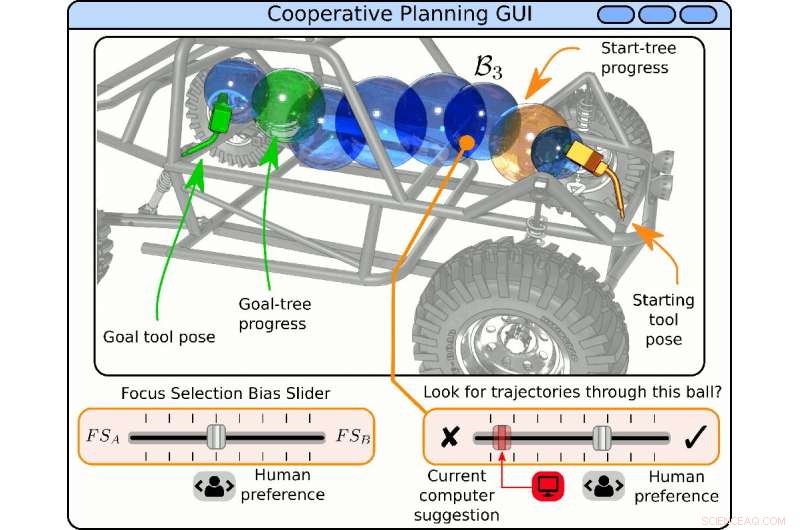
Dette billede viser en grafisk brugergrænseflade med samarbejdsplanlægning, som anvendt i en svejseindstilling med rullebursamling. stiplanlæggeren har i første omgang til opgave at flytte svejseværktøjet fra "startværktøjsstilling" til "målværktøjsstilling." Hvis stiplanlæggeren støder på problemer med at producere en løsning, det underretter de menneskelige operatører, hvem vil så skabe en række bolde, der udgør et hint om, hvordan robotten skal bevæge sig fra "startværktøjsposition" til "målværktøjsstilling." Menneskelige operatører kan flytte boldene, ændre størrelsen på boldene og i det væsentlige deformere rækken af kugler, indtil stiplanlæggeren er i stand til at udnytte de givne hints. Kredit:pradeep rajendran.
Forskere ved USC Viterbi Center for Advanced Manufacturing identificerer en algoritme til at optimere robotter til at give korte, kollisionsfri løsninger i komplekse produktionsrum.
Forestil dig et bilsamlingsanlæg:tusindvis af gentagne opgaver skal udføres på daglig basis, såsom at sætte et rat ind i en bil. Når først robotten lærer den bedste bane for at komme fra punkt A (hvor hjulene er stablet) til punkt B (hvor hjulet skal indsættes), det kan udføres på dette millioner af gange, uden fejl eller sammenstød.
Imidlertid, hvis denne opgave ændres lidt – for eksempel at øge hjulstørrelsen – vil robotten ikke være i stand til at fuldføre opgaven.
For at hjælpe med at automatisere robotter til at levere løsninger af høj kvalitet selv i komplekse produktionsscenarier, forskere fra USC Viterbi School of Engineerings Center for Advanced Manufacturing (CAM) identificerede en ny tilgang til at automatisere robotters veje gennem deres arbejdsområder. I forskning præsenteret på den internationale konference om intelligente robotter og systemer den 4. november, 2019 i Macau, Kina, forskerholdet, herunder professor SK Gupta, Smith International Professor i Mechanical Engineering og CAM-direktør, og ph.d. kandidat Pradeep Rajendran, foreslået en ny stiplanlægningsalgoritme og grænseflade, der guider robotter til at tage den korteste, hurtigste rute fra et kildepunkt til et destinationspunkt i et arbejdsområde med minimalt menneskeligt input.
"Vi foreslår en tilgang til at fremkalde menneskelig feedback under den automatiserede stiplanlægning for manipulatorer, der opererer i meget komplekse arbejdsområder - f.eks. satellitmontageoperationer, " sagde Rajendran. "Typisk, robotoperatører bruger en automatisk stiplanlægger til at planlægge en bane, hvor robotten kan udføre opgaven i arbejdsområdet. Hvis stiplanlægningen mislykkes - hvilket betyder, at den foreslåede bane ikke giver de ønskede resultater - skal robotoperatører manuelt indtaste waypoints - specifikke punkter langs stien for at guide robotten fra dens kilde til dens destination."
Denne situation opstår oftere i komplekse eller begrænsede arbejdsområder, ligesom satellitmontageoperationen, hvor vanskeligere arbejdsrumsgeometrier, fysiske forhindringer og hyppigere ændringer eller tilpasning kræver robotter til at udføre komplekse stier. Som resultat, robotoperatører spilder værdifuld tid på manuelt at indtaste oplysninger for hvert scenarie, besejre formålet med at bruge automatisering i første omgang.
Algoritmen fungerer ved at give robotten en brugervenlig grænseflade til at indsamle input fra menneskelige operatører tidligt i stiplanlægningen - processen med at kortlægge den rute, robotten skal tage gennem arbejdspladsen for at udføre sin opgave. Den menneskelige operatør bliver advaret, gennem visuelle signaler i programmet, til de mere komplekse områder, robotten skal navigere og kan give information i overensstemmelse hermed, at udarbejde direktiver på højt niveau. Som resultat, når robotten støder på små ændringer i sin opgave – som den førnævnte hjulstørrelsesforøgelse – vil den være i stand til at trække på disse direktiver og justere sin vej i overensstemmelse hermed.
Metoden udviklet af forskere i USC Viterbis Department of Aerospace and Mechanical Engineering - som også inkluderer post-doc-forsker Ariyan Kabir, Ph.D. studerende Shantanu Thakar og CAM-forsker Brual Shah - prioriterer automatisering, sikre, at stiplanlægningsprogrammet kun fremkalder hjælp, når det er nødvendigt. Det tager typisk 15 til 30 minutter at angive en sti manuelt; med stiplanlægningsalgoritmen, stien kan genereres inden for få sekunder.
"Ved fremstilling af små mængder, robotter udfører mange ikke-gentagelige opgaver, der ændrer sig ofte. Programmering af robotter til hver af disse iterationer af opgaver er ikke kun tidskrævende, det er kedeligt og ineffektivt, " sagde Rajendran. "Med denne nye algoritme, vi demonstrerer, at mange ikke-gentagne processer, der forekommer i små mængder fremstillingsapplikationer, nemt kan automatiseres, med minimal input fra menneskelige operatører."
 Varme artikler
Varme artikler
-
 Hvorfor florerer lysstofrør?En fluorescerende lampe eller lysstofrør er en gasudladningslampe (lamper, der genererer lys ved at føre en elektrisk ladning gennem en ioniseret gas), som udnytter elektricitet til at excitere kviksø
Hvorfor florerer lysstofrør?En fluorescerende lampe eller lysstofrør er en gasudladningslampe (lamper, der genererer lys ved at føre en elektrisk ladning gennem en ioniseret gas), som udnytter elektricitet til at excitere kviksø -
 Forskere advarer om phishing -tekster, der angriber smartphonesSikkerhedsforskere siger, at ondsindet software, der gemmer sig i tekstbeskeder, kan gøre det muligt for angriberne at overtage smartphones Cybersikkerhedsforskere advarede onsdag om ondsindet sof
Forskere advarer om phishing -tekster, der angriber smartphonesSikkerhedsforskere siger, at ondsindet software, der gemmer sig i tekstbeskeder, kan gøre det muligt for angriberne at overtage smartphones Cybersikkerhedsforskere advarede onsdag om ondsindet sof -
 Forskere bruger spilteori til at hjælpe politiske beslutningstagere med at skabe ansvarsregler for …Hierarkisk spilstruktur, illustrerer de tre-lags hierarkiske strategiske interaktioner mellem lovgiveren, AV-producenten, AVer, og HVer på veje. Hver spiller har forskellige eller endda modstridende m
Forskere bruger spilteori til at hjælpe politiske beslutningstagere med at skabe ansvarsregler for …Hierarkisk spilstruktur, illustrerer de tre-lags hierarkiske strategiske interaktioner mellem lovgiveren, AV-producenten, AVer, og HVer på veje. Hver spiller har forskellige eller endda modstridende m -
 EU-ministre rejser bekymringer om privatlivets fred i lovforslaget om e-bevisFlere EU-lande, herunder Tyskland, har rejst bekymring for, at lovforslaget mangler borgerrettighedsgarantier EU-ministre rejste fredag bekymring om, hvorvidt borgernes rettigheder er beskyttet
EU-ministre rejser bekymringer om privatlivets fred i lovforslaget om e-bevisFlere EU-lande, herunder Tyskland, har rejst bekymring for, at lovforslaget mangler borgerrettighedsgarantier EU-ministre rejste fredag bekymring om, hvorvidt borgernes rettigheder er beskyttet
- Graphene tager fart i kompositter til fly og biler
- Kilder til lydenergi
- Samtaler genoptages mellem SAS og piloter, efterhånden som flere flyafgange er aflyst
- Hydrogel med langsom frigivelse hjælper immunterapi mod kræft
- Gå med isflagen:Havisens bevægelser sporer dynamikken, der transformerer det nye Arktis
- Jeg tager en genanvendelig rakettur for 43 millioner dollars,