


Forskere bruger spilteori til at hjælpe politiske beslutningstagere med at skabe ansvarsregler for ulykker, der involverer selvkørende biler
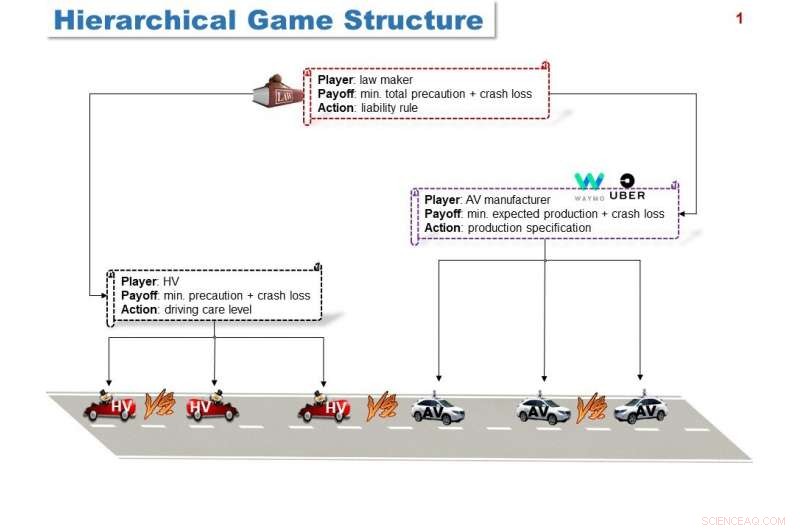
Hierarkisk spilstruktur, illustrerer de tre-lags hierarkiske strategiske interaktioner mellem lovgiveren, AV-producenten, AV'er, og HV'er på veje. Hver spiller har forskellige eller endda modstridende mål, sigter mod at vælge én strategi for at optimere hans eller hendes mål. Kredit:Sharon Di og Xu Chen/Columbia Engineering
En nylig beslutning fra National Transpiration Safety Board (NTSB) om Uber-ulykken i marts 2018, der dræbte en fodgænger i Arizona, delte skylden mellem Uber, virksomhedens autonome køretøj (AV), sikkerhedsføreren i køretøjet, offeret, og staten Arizona. Med fremkomsten af selvkørende biler, NTSB-resultaterne rejser en række spørgsmål om usikkerheden i nutidens juridiske ansvarssystem. I en ulykke, der involverede en AV og en menneskelig fører, hvem hæfter? Hvis begge er ansvarlige, hvordan skal ulykkestabet fordeles mellem dem?
AV'er fjerner folk fra den praktiske opgave at køre bil og udgør dermed en kompleks udfordring for nutidens erstatningsret ved ulykker, som primært straffer mennesker. Juridiske eksperter forventer, at ved at programmere kørealgoritmer, selvkørende bilproducenter, herunder bildesignere, sensor leverandører, softwareudviklere, bilproducenter, og nærtstående parter, der bidrager til designet, fremstilling, og test, vil have direkte indflydelse på trafikken. Mens disse algoritmer gør producenter til uundværlige aktører, hvor deres produktansvar potentielt spiller en afgørende rolle, Politikere har endnu ikke udtænkt en kvantitativ metode til at fordele tabet mellem den selvkørende bil og den menneskelige chauffør.
For at løse dette problem, forskere ved Columbia Engineering og Columbia Law School har udviklet en fælles fejlbaseret ansvarsregel, der kan bruges til at regulere både selvkørende bilproducenter og menneskelige chauffører. De foreslår en spilteoretisk model, der beskriver de strategiske interaktioner mellem lovgiveren, den selvkørende bilproducent, den selvkørende bil, og menneskelige chauffører, og undersøge hvordan, efterhånden som AV'ers markedspenetration øges, ansvarsreglen bør udvikle sig.
Deres resultater er beskrevet i en ny undersøgelse, der præsenteres den 14. januar af Sharon Di, adjunkt i civilingeniør og ingeniørmekanik, og Eric Talley, Isidor og Sevilla Sulzbacher professor i jura, ved Transportation Research Boards 99. årlige møde i Washington, D.C
Mens de fleste aktuelle undersøgelser har fokuseret på at designe AV'ers kørealgoritmer i forskellige scenarier for at sikre trafikeffektivitet og sikkerhed, de har ikke udforsket menneskelige chaufførers adfærdsmæssige tilpasning til AV'er. Di og Talley undrede sig over den "moralske fare"-effekt på mennesker, hvad enten det er med eksponering for mere og mere trafikmøder med AV'er, folk kan være mindre tilbøjelige til at udvise "behørig forsigtighed", når de står over for AV'er på vejen og kører på en mere risikabel måde.
"Menneskelige bilister opfatter AV'er som intelligente agenter med evnen til at tilpasse sig mere aggressiv og potentielt farlig menneskelig køreadfærd, "siger Di, som er medlem af Columbias Data Science Institute. "Vi fandt ud af, at menneskelige chauffører kan drage fordel af denne teknologi ved at køre uforsigtigt og tage flere risici, fordi de ved, at selvkørende biler ville være designet til at køre mere konservativt."
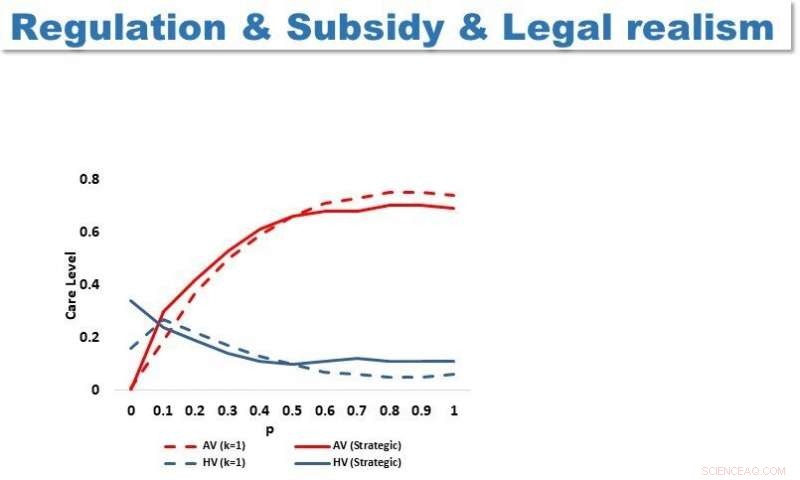
Holdet fandt ud af, at en optimalt designet ansvarspolitik er afgørende for at forhindre menneskelige chauffører i at udvikle moralsk fare og for at hjælpe AV-producenten med en afvejning mellem trafiksikkerhed og produktionsomkostninger. Kredit:Sharon Di og Xu Chen/Columbia Engineering
Forskerne brugte spilteori til at modellere en verden med interagerende spillere, der forsøger at vælge deres egne handlinger for at optimere deres egne mål. Spillerne - lovgivere, AV -producenter, AV'er, og menneskelige chauffører - har forskellige mål i transportøkosystemet. Lovgivere ønsker at regulere trafikken med forbedret effektivitet og sikkerhed, selvkørende bilproducenter er profitdrevne, og både selvkørende biler og menneskelige chauffører interagerer på offentlige veje og søger at vælge de bedste kørestrategier. For at fange den komplekse interaktion mellem alle spillerne, forskerne anvendte spilteoretiske metoder for at se, hvilken strategi hver spiller lægger sig til, så andre ikke vil udnytte hans eller hendes beslutninger.
Det hierarkiske spil hjalp holdet til at forstå de menneskelige chaufførers moralske fare (hvor meget risiko chauffører kan beslutte at påtage sig), AV-producentens indvirkning på trafiksikkerheden, og lovgivers tilpasning til det nye transportøkosystem. De testede spillet og dets algoritme på et sæt numeriske eksempler, giver indsigt i adfærdsmæssig udvikling af AV'er og HV'er, efterhånden som AV-penetrationshastigheden stiger, og da omkostninger eller miljøparametre varierer.
Holdet fandt ud af, at en optimalt designet ansvarspolitik er afgørende for at forhindre menneskelige chauffører i at udvikle moralsk fare og for at hjælpe AV-producenten med en afvejning mellem trafiksikkerhed og produktionsomkostninger. Offentlige tilskud til AV-producenter til reduktion af produktionsomkostninger vil i høj grad tilskynde producenterne til at producere AV'er, der klarer sig væsentligt bedre end menneskelige chauffører og forbedre den overordnede trafiksikkerhed og effektivitet. I øvrigt, hvis AV-producenter ikke er reguleret med hensyn til AV-teknologispecifikationer eller ikke er behørigt subsidieret, AV-producenter har en tendens til at være rent profitorienterede og ødelæggende for det overordnede trafiksystem.
"Det tragiske dødsfald i Arizona, der involverede en selvkørende bil, vakte enorm opmærksomhed fra offentligheden og beslutningstagere om, hvordan man trækker grænserne for juridisk ansvar, når AV'er interagerer med menneskelige chauffører, cyklister, og fodgængere, ", tilføjer Talley. "Fremkomsten af AV'er introducerer en særlig tornet form for usikkerhed i status quo, og en, der går tilbage til AV-produktion og -design. Juridisk ansvar for ulykker mellem biler og fodgængere involverer typisk en kompleks beregning af sammenlignende fejlvurderinger for hver af de førnævnte grupper. Introduktionen af et autonomt køretøj kan komplicere sagerne yderligere ved at tilføje andre parter til blandingen, såsom producenter af hardware og programmører af software. Og forsikringsdækning fordrejer sagen yderligere ved at inkludere tredjepartsinteressenter. Vi håber, at vores analytiske værktøjer vil hjælpe AV-politiske beslutningstagere med deres lovgivningsmæssige beslutninger, og ved at gøre det, vil hjælpe med at afbøde usikkerheden i det eksisterende lovgivningsmæssige miljø omkring AV-teknologier."
Di og Talley kigger nu på flere AV-producenter, der retter sig mod forskellige globale markeder med forskellige teknologiske specifikationer, gør udviklingen af juridiske regler endnu mere kompleks.
"Vi ved, at menneskelige bilister vil tage flere risici og udvikle moralsk fare, hvis de tror, at deres vejmiljø er blevet sikrere, " Di bemærker. "Det er klart, at et optimalt ansvarsreglerdesign er afgørende for at forbedre social velfærd og trafiksikkerhed med avancerede transportteknologier."
 Varme artikler
Varme artikler
-
 Europæiske virksomheder i skudlinjen for sanktioner mod IranAirbus og andre store europæiske selskaber skal finde ud af, hvordan de skal håndtere nye amerikanske sanktioner mod Iran Europæiske virksomheder har mest at tabe på fornyede amerikanske sanktione
Europæiske virksomheder i skudlinjen for sanktioner mod IranAirbus og andre store europæiske selskaber skal finde ud af, hvordan de skal håndtere nye amerikanske sanktioner mod Iran Europæiske virksomheder har mest at tabe på fornyede amerikanske sanktione -
 Det er en fugl. Det er et fly. Er det en e-scooter?Kredit:CC0 Public Domain Siden e-scootere ankom til Atlanta i foråret 2018, veje og fortove fra midtbyen til centrum har vrimlet med enheder, som giver en hurtig, sjovt og overkommeligt transporta
Det er en fugl. Det er et fly. Er det en e-scooter?Kredit:CC0 Public Domain Siden e-scootere ankom til Atlanta i foråret 2018, veje og fortove fra midtbyen til centrum har vrimlet med enheder, som giver en hurtig, sjovt og overkommeligt transporta -
 Store nye undersøgelsesdiagrammer forløber til netto nul industrielle emissionerKredit:CC0 Public Domain En større ny undersøgelse foretaget af et tværfagligt forskerteam finder, at det er muligt - og kritisk - at bringe industrielle drivhusgasemissioner til nul i 2070. Udgiv
Store nye undersøgelsesdiagrammer forløber til netto nul industrielle emissionerKredit:CC0 Public Domain En større ny undersøgelse foretaget af et tværfagligt forskerteam finder, at det er muligt - og kritisk - at bringe industrielle drivhusgasemissioner til nul i 2070. Udgiv -
 Forskere forvandler plastikvandflasker til proteserKredit:CC0 Public Domain Kunstige lemmer lavet af plastikvandflasker kan spare sundhedsudbydere for millioner af pund og hjælpe med at tackle forurening på samme tid. En ekspert ved De Montfort U
Forskere forvandler plastikvandflasker til proteserKredit:CC0 Public Domain Kunstige lemmer lavet af plastikvandflasker kan spare sundhedsudbydere for millioner af pund og hjælpe med at tackle forurening på samme tid. En ekspert ved De Montfort U
- Nye måleteknikker kan forbedre effektiviteten, nanopartiklers sikkerhed
- Plastikspisende enzymcocktail indvarsler nyt håb for plastikaffald
- Fremme additiv fremstilling ved at skære ned på støtten
- Sådan bruges eddike og salt til at gøre en penny forsvinder
- Arktisk kystnær havisen truet af klimaændringer, undersøgelse finder
- Laserudbrud genererer elektricitet hurtigere end nogen anden metode