


Intelligent træktank udfører automatisk 100, 000 eksperimenter på bare et år
En oversigt over den intelligente bugsertank med hovedkomponenterne i en 10-meters tank, en vogn, en computer og motorstyringer. Kredit:Fan et al., Sci. Robot. 4, eaay5063 (2019)
Et team af forskere, der arbejder i et MIT-laboratorium, har bygget en intelligent træktank (ITT), der er i stand til at udføre væskedynamiske eksperimenter, og har brugt det til at udføre 100, 000 sådanne eksperimenter på bare et år. I deres papir offentliggjort i tidsskriftet Videnskab robotik , holdet beskriver ITT, dens muligheder og hvad den har arbejdet på i det seneste år.
Når ingeniører designer skibe, de ønsker, at det resulterende køretøj skal bevæge sig gennem vandet så effektivt som muligt. Dette involverer anvendelse af fluiddynamikforskning. Men som eksperimenterne fra holdet på MIT viser, der er stadig mere at lære. En af de ting, skibsbyggere har lært, er, at "hvirvel-inducerede vibrationer" skal modelleres og observeres. I praksis, dette har involveret at flytte en model gennem vand og bemærke de vibrationer, der opstår, derefter bruge dataene til at ændre parametre gentagne gange for at forbedre, en proces, der tager mange mandetimer.
I denne nye indsats, forskerne rapporterer om en måde at mekanisere processen ved at bygge en slags robot på en tank med vand. Resultatet var ITT, som er i stand til at tage målinger, når den kører en model hen over en tank med vand, analysere målingerne og konstruere og udføre det næste logiske eksperiment. Den gør dette gentagne gange, indtil den når en ønsket tærskel. Forskerne rapporterer, at det har været hårdt arbejde med at udføre sådanne eksperimenter i det sidste år, udtænke og udføre ca. 100, 000 eksperimenter - i det væsentlige udfører hver anden uge lige så meget arbejde som en ph.d. studerende skulle gøre for at tage eksamen. De hævder, at det også har udført flere "hvirvel-inducerede vibrationer" eksperimenter i løbet af det seneste år, end mennesker har gjort i alt.
Forskerne foreslår, at ITT repræsenterer en milepæl i videnskabelige eksperimenter - det viser, at mange eksperimenter, der kræver massiv gentagelse, kan udføres ved hjælp af robotter, sparer utallige arbejdstimer.

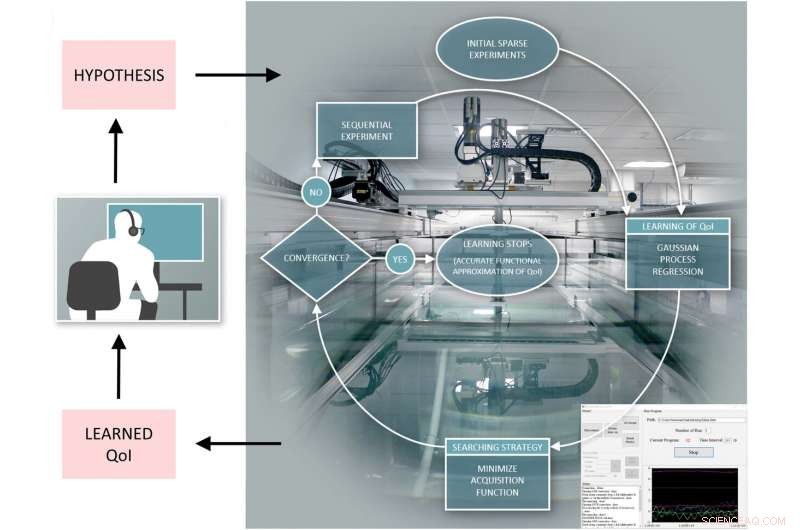
Skematisk billede af den intelligente bugseringstank, en cylinder og sensorer monteret på hovedvognen, som blev brugt til at udføre de forskellige flydende bevægelser, og en controller (controllerens grafiske brugergrænseflade, registrering af bevægelses- og kraftsignaler, er vist nederst til højre på figuren). ITT tager en menneskeskabt hypotese og udfører derefter sekventielle eksperimenter for at målrette bestemte mængder af interesse, kun afbrudt af pauser, der venter på, at vandet falder til ro mellem forsøgene. Der er ingen mennesker, der kontrollerer den sekventielle eksperimentelle test. Kredit:Fan et al., Sci. Robot. 4, eaay5063 (2019)
© 2019 Science X Network
Sidste artikelNATO-forskere:Sociale medier formår ikke at stoppe manipulation
Næste artikelEn gnu måde at kontrollere stuetemperatur på
 Varme artikler
Varme artikler
-
 Amazon fremhævede som en stor sejr for NY, men matematik er mere komplekstI denne 13. november, 2018, fil foto, en måge flyver af sted med fiskerester i nærheden af et tidligere havneanlæg, med Long Island malet på gamle overførselsbroer i Gantry State Park i Long Island
Amazon fremhævede som en stor sejr for NY, men matematik er mere komplekstI denne 13. november, 2018, fil foto, en måge flyver af sted med fiskerester i nærheden af et tidligere havneanlæg, med Long Island malet på gamle overførselsbroer i Gantry State Park i Long Island -
 Er computerstøttede beslutninger faktisk rimelige?(Fra venstre) Adam Smith, Sarah Scheffler, og Ran Canetti. Kredit:Jackie Ricciardi Algoritmisk retfærdighed bliver stadig vigtigere, fordi efterhånden som flere beslutninger af større betydning tr
Er computerstøttede beslutninger faktisk rimelige?(Fra venstre) Adam Smith, Sarah Scheffler, og Ran Canetti. Kredit:Jackie Ricciardi Algoritmisk retfærdighed bliver stadig vigtigere, fordi efterhånden som flere beslutninger af større betydning tr -
 var tekniske, også! Deere, Tidevandsproducenten tager til CES-gadgetshowHansjoerg Reick ser på en visning af Oral-B Genius X smarte tandbørster på Procter &Gamble standen før CES International, Mandag, 7. januar, 2019, i Las Vegas. (AP Photo/John Locher) Virksomhedern
var tekniske, også! Deere, Tidevandsproducenten tager til CES-gadgetshowHansjoerg Reick ser på en visning af Oral-B Genius X smarte tandbørster på Procter &Gamble standen før CES International, Mandag, 7. januar, 2019, i Las Vegas. (AP Photo/John Locher) Virksomhedern -
 Canada vil øge atomkraften for at hjælpe med at opfylde klimamåletCanada forventes at fremme atomkraft på et forum i Danmark Canada, den næststørste producent af uran, vil øge sin afhængighed af atomkraft for at reducere sit CO2 -fodaftryk og vil tilskynde andre
Canada vil øge atomkraften for at hjælpe med at opfylde klimamåletCanada forventes at fremme atomkraft på et forum i Danmark Canada, den næststørste producent af uran, vil øge sin afhængighed af atomkraft for at reducere sit CO2 -fodaftryk og vil tilskynde andre