


Akustisk drevet mikrorobot overstråler naturlige mikrosvømmere
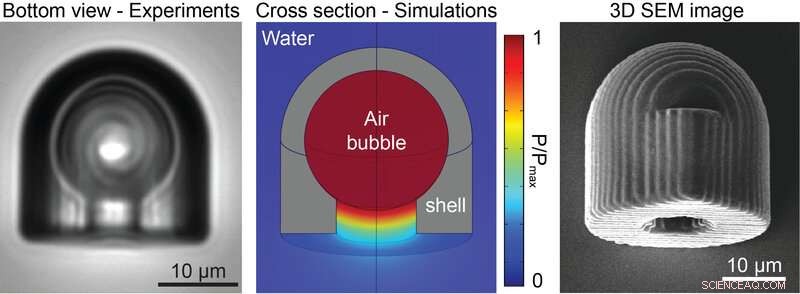
Figur 1. Mikroskopibillede af den akustisk drevne mikrorobot med en fanget sfærisk luftboble inde i sin krop (venstre); Akustisk trykfelt omkring mikrorobotten forudsagt af de numeriske simuleringer (midten); Scanningselektronmikroskopibillede af den tredimensionelt printede mikrorobot med en skarp finne øverst (til højre). Kredit:Max Planck Institute for Intelligent Systems Stuttgart
Forskere ved Max Planck Institute for Intelligent Systems i Stuttgart har designet og fremstillet en ubundet mikrorobot, der kan glide langs enten en flad eller buet overflade i en væske, når den udsættes for ultralydsbølger. Dens fremdriftskraft er to til tre størrelsesordener stærkere end fremdriftskraften af naturlige mikroorganismer såsom bakterier eller alger. Derudover det kan transportere gods, mens du svømmer. Den akustisk drevne robot har derfor et betydeligt potentiale til at revolutionere den fremtidige minimalt invasive behandling af patienter.
Stuttgart-Forskere ved Max Planck Institute for Intelligent Systems (MPI-IS) i Stuttgart udviklede en kugleformet, syntetisk miniaturerobot med en diameter på 25 mikrometer, som er akustisk drevet frem - en fartkugle, i ordets sandeste betydning. Mindre end diameteren af et menneskehår i størrelse, aldrig før har sådan en aktiveret mikrorobot nået denne hastighed. Dets smarte design er så effektivt, at det endda overgår svømmeevnen hos naturlige mikroorganismer.
Forskerne designede den 3-D-printede polymermikrorobot med et sfærisk hulrum og en lille rørlignende dyse mod bunden (se figur 1). Omgivet af væske som vand, hulrummet fanger en sfærisk luftboble. Når først robotten er udsat for akustiske bølger på omkring 330 kHz, luftboblen pulserer, skubbe væsken inde i røret mod bagenden af mikrorobotten. Væskens bevægelse driver derefter kuglen frem ganske kraftigt med op til 90 kropslængder i sekundet. Det er en trykkraft to til tre størrelsesordener stærkere end naturlige mikroorganismer såsom alger eller bakterier. Begge er blandt de mest effektive mikrosvømmere i naturen, optimeret af evolution.
At implementere ultralydsbølger til at aktivere mikrorobotter er ikke en ny tilgang. Imidlertid, tidligere robotter med svømmeevner har vist sig at være relativt langsomme, svært at kontrollere nær overflader, og har haft en forholdsvis kort driftstid på kun få minutter. Alle disse faktorer er hindringer for deres anvendelse i medicinske applikationer til målrettet lægemiddellevering, afgiftning, eller ikke-invasive operationer. Forskerne fra afdelingen for fysisk efterretning ved MPI-IS, Dr. Amirreza Aghakhani, Godt Yasa, Paul Wrede, og Dr. Metin Sitti, hvem er afdelingens direktør, var i stand til at finjustere deres robots styreegenskaber og samtidig øge driftstiden til flere timer. Deres publikation "Akustisk drevne overfladeglidende mobile mikrorobotter" blev udgivet i Proceedings of the National Academy of Sciences i februar 2020.
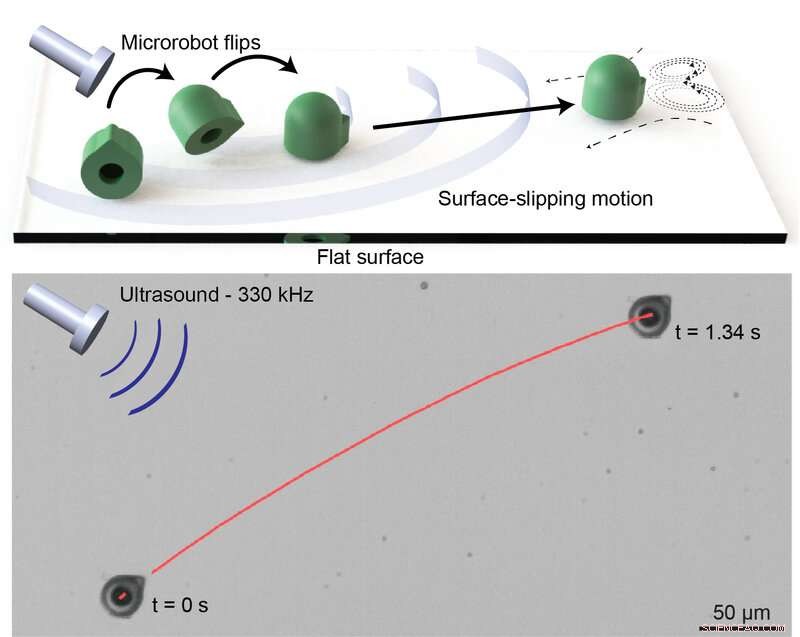
Figur 2. Skema af en overfladeglidende mikrorobot under ultralydsdrift (øverst); Time-lapse billede af den bevægende mikrobot på et substrat ved 330 kHz akustisk excitation (nederst). Kredit:Max Planck Institute for Intelligent Systems Stuttgart
Ud over at designe robotten med et indvendigt hulrum, der fanger en sfærisk luftboble med en lille åbning, de tilføjede en lille finne til mikrorobottens cylindriske kropsoverflade (se figur 2), hvilket forspænder fremdriftsretningen. De har også belagt toppen af polymerkuglen med et blødt magnetisk nanofilmlag. Ved hjælp af omgivende eksterne magnetfelter, de var så i stand til at ændre retningen af kuglen til venstre eller højre, såvel som op eller ned.
I flere forsøg, forskerne testede, hvor i stand deres robot er til at bevæge sig på forskellige overflader inde i en mikrokanal, der ligner et blodkar. De udsatte robotten for akustiske bølger og et magnetfelt og lykkedes med at navigere den i dette begrænsede 3D-rum. De viste også, at indfangning af last sker automatisk, mens mikrorobotten bevæger sig. Mens væsken bliver skubbet ud af robottens hulrum, når den udsættes for ultralydsbølger, et cirkulært microstreaming-mønster genereres mod bunden (se figur 2). Denne strøm sikrer, at omgivende lægemiddelpartikler ledes mod robotten. der, partiklerne samles og transporteres væk med robottens bevægelse. Takket være dette, robotten kunne en dag bruges til at opsamle kræftlægemiddelpartikler inde i blodbanen og specifikt transportere stoffet mod et karcinom, frigivelse af lasten på tæt hold for maksimal effekt.
Dr. Amirreza Aghakhani, en postdoktor i Afdelingen for Fysisk Intelligens og medforfatter af publikationen, opsummerer mikrorobottens særlige egenskaber:"Vi kan aktivere vores mikrorobotter meget effektivt, og de er også meget hurtige. Ultralyd er uskadeligt for kroppen og kan trænge ind i områder dybt inde i kroppen. Vi kan flytte disse robotter på både flade og buede overflader på en kontrolleret måde, og vi kan fastgøre forskellig last, såsom stoffer. Det her er imponerende."
En anden fordel er ultralydsbilleddannelse. Inde i kroppen, billeddannelse er meget udfordrende, når robotten kun er flere mikrometer stor. "Imidlertid, den indespærrede luftboble kan fungere som kontrastmiddel, gør robotten og dens placering mere synlig, " tilføjer Dr. Aghakhani.
"Vores vision er at implementere sådanne akustisk drevne og magnetisk styrede mikrorobotter inde i den menneskelige krop til forskellige ikke-invasive medicinske applikationer i den nærmeste fremtid, " Dr. Metin Sitti afslutter.
Sidste artikelForpurre hacks ved at tænke som menneskene bag dem
Næste artikelDeep learning forudsiger nøjagtigt hedebølger, kuldeperioder
 Varme artikler
Varme artikler
-
 Spotify advarer om lavere salgsvækst, efterhånden som børsnoteringen i New York nærmer sigSpotifys vejledning kom dage forud for deres børsnotering i New York Spotify, verdens førende musikstreamingside, sagde mandag, at dets salgsvækst sandsynligvis ville aftage i år, men at det stadi
Spotify advarer om lavere salgsvækst, efterhånden som børsnoteringen i New York nærmer sigSpotifys vejledning kom dage forud for deres børsnotering i New York Spotify, verdens førende musikstreamingside, sagde mandag, at dets salgsvækst sandsynligvis ville aftage i år, men at det stadi -
 Forskere tilbageviser 20 år gamle antagelser i solcelleproduktionMikroskopisk billede af solcelleabsorberen lavet af et korn (sort og hvid) og tilsvarende kemisk analyse, der viser koncentrationen af gallium (orange) og indium (lilla). Kredit:University of Luxemb
Forskere tilbageviser 20 år gamle antagelser i solcelleproduktionMikroskopisk billede af solcelleabsorberen lavet af et korn (sort og hvid) og tilsvarende kemisk analyse, der viser koncentrationen af gallium (orange) og indium (lilla). Kredit:University of Luxemb -
 Samsung lancerer folde smartphone, første 5G-håndsæt (opdatering)Samsungs senior vicepræsident for produktmarketing Justin Denison annoncerer den nye Samsung Galaxy Fold-smartphone under Samsung Unpacked-begivenheden den 20. februar, 2019 i San Francisco, Californi
Samsung lancerer folde smartphone, første 5G-håndsæt (opdatering)Samsungs senior vicepræsident for produktmarketing Justin Denison annoncerer den nye Samsung Galaxy Fold-smartphone under Samsung Unpacked-begivenheden den 20. februar, 2019 i San Francisco, Californi -
 Teknologien gør det muligt for bløde kontaktlinser at overvåge glukose, medicinske tilstande og l…Purdue University-forskere kombinerede en kommerciel blød kontaktlinse med et ultratyndt, konformt sensorkredsløb. Kredit:Purdue University Purdue University-forskere har udviklet bløde kontaktlin
Teknologien gør det muligt for bløde kontaktlinser at overvåge glukose, medicinske tilstande og l…Purdue University-forskere kombinerede en kommerciel blød kontaktlinse med et ultratyndt, konformt sensorkredsløb. Kredit:Purdue University Purdue University-forskere har udviklet bløde kontaktlin
- Danske forskere skaber en verdensomspændende solenergimodel
- Ingen beslutning om næste opsendelsesforsøg for den historiske SpaceX-NASA-mission
- Halvdelen af det globale spildevand renset, satserne i udviklingslandene halter stadig
- Hvilke typer af lopper lever i Florida?
- Forudsigelse af by- og kystmikroklimaer
- Nanomateriale i ny hjemmeluftbehandling modvirker farer fra giftige gipsvægge