


Undersøgelse af fritfaldende papirformer kan hjælpe med at designe bio-inspireret robotik

Kredit:CC0 Public Domain
Forskning i banerne for hundredvis af fritfaldende papirformer kan hjælpe med at informere designet af bioinspireret robotik, der efterligner naturen.
Forskere fra Institut for Ingeniørvidenskabers Bio-Inspired Robotics Lab har tacklet udfordringen med at modellere den komplekse og varierede adfærd i cirkler og, for første gang, mere kompleks firkant, sekskant og krydsformer - alle uden menneskeligt input.
Forskningen, offentliggjort i tidsskriftet Nature Machine Intelligence , anvender robotautomatik, edb -vision og maskinlæring til selvstændigt at kortlægge den faldende adfærd i de former, der hver udviser fire faldende stilarter:tumbling (kontinuerligt vende ende mod ende), kaotisk (skifte mellem tumlende og svingende bevægelser uden tilsyneladende struktur), konstant og periodisk (falder støt eller svinger frem og tilbage med en vandret retning).
Engineering Ph.D. studerende Toby Howison, der var en del af forskergruppen, sagde undersøgelsesresultaterne kan bruges til at give praktisk indsigt i design af robotik, der kan være påkrævet for at udvise visse adfærd i forbindelse med deres stabilitet eller faldhastighed, for eksempel.
Metoden - kendt som et iterativt fysisk eksperimenteringssystem (IPES) - gør det muligt for forskere hurtigt at indsamle store datamængder og automatisk analysere dem for at afsløre mønstre i den underliggende dynamik i de faldende papirformer. Hele processen tager i gennemsnit 90 sekunder at gennemføre, med former, der tager mellem et og fem sekunder at falde til jorden. Automatisering af denne proces giver en mere gentagelig, mindre subjektiv klassifikationsmetode, og resultaterne viste, at et uovervåget klassificeringsskema som dette kan præcist skelne mellem kaotisk og tumlende bevægelse i alle fire former.
Den eksperimentelle opsætning bestod af en laserskærer til fremstilling af former, en Universal Robots UR5 robotarm udstyret med en brugerdefineret sugegreb til at vælge og slippe figurerne fra en 1,1 meters højde - enten vandret eller lodret (tilfældigt valgt), og to højhastighedskameraer til at registrere den faldende adfærd. Dette gjorde det muligt at beregne de tredimensionelle faldbaner og den tilsvarende svingning. Dataene blev derefter behandlet og brugt til automatisk at segmentere og klassificere adfærd og undersøge, for eksempel, forholdet mellem papirets form, dens adfærd og faldhastighed.
Toby Howison sagde:"Hvis vi skal designe flyvende robotter med komplicerede bevægelser som f.eks. Glidning eller flak, dette kræver nogle virkelige eksperimenter. Det er her autonome systemer som IPES kan hjælpe med at informere ikke kun vores forståelse af sådanne bevægelser, men også hvordan de kan replikeres i robotdesign.
"Ved at undersøge banerne for hundredvis af fritfaldende papirformer-et mangeårigt udfordrende fænomen-har vi været i stand til at studere, analysere og fortolke forskellige former for faldende adfærd på en ny måde, takket være robotteknologi. Som resultat, vi kan nu overføre vores læring af denne adfærd til designet af blød robotik, der går eller svømmer, for eksempel.
"Det er kun ved at forstå strukturer som frit faldende papirformer, at vi kan lære mere om, hvordan de forskellige komponenter i den struktur interagerer. Vores forskning viser, at interaktionen mellem papirets form og dets miljø giver en pålidelig faldende stil, som er oprettet uden nogen indbygget kontrol, såsom, en computerchip eller motor. "
 Varme artikler
Varme artikler
-
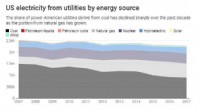 Hvad får naturgasflaskehalse til at ske under ekstreme kolde snapsAl energi målt i tusinder af megawattimer. Vindkategorien omfatter også andre vedvarende kilder end vand- og solenergi. Kredit:Diagram:Samtalen, CC-BY-ND Kilde:U.S. Energy Information Administration
Hvad får naturgasflaskehalse til at ske under ekstreme kolde snapsAl energi målt i tusinder af megawattimer. Vindkategorien omfatter også andre vedvarende kilder end vand- og solenergi. Kredit:Diagram:Samtalen, CC-BY-ND Kilde:U.S. Energy Information Administration -
 En ny iPhone er på vej. Men nej, du behøver ikke rigtig at betale priser for nye telefonerKredit:CC0 Public Domain Nye iPhones vil sandsynligvis blive afsløret 10. september og i butikkerne kort efter. Så skal du virkelig betale over $1, 000 for en ny telefon og har den nyeste og beds
En ny iPhone er på vej. Men nej, du behøver ikke rigtig at betale priser for nye telefonerKredit:CC0 Public Domain Nye iPhones vil sandsynligvis blive afsløret 10. september og i butikkerne kort efter. Så skal du virkelig betale over $1, 000 for en ny telefon og har den nyeste og beds -
 Microsoft beslaglægger webdomæner, der bruges af nordkoreanske hackereMicrosoft sagde, at det overtog onlinedomæner, der blev brugt af nordkoreanske hackere, i den fjerde operation af sin art mod en nationalstatsenhed Microsoft sagde mandag, at det opnåede en retsor
Microsoft beslaglægger webdomæner, der bruges af nordkoreanske hackereMicrosoft sagde, at det overtog onlinedomæner, der blev brugt af nordkoreanske hackere, i den fjerde operation af sin art mod en nationalstatsenhed Microsoft sagde mandag, at det opnåede en retsor -
 Sprint, T-Mobile-aktier falder på grund af frygt for, at aftalen vil blive blokeretT-Mobiles køb af Sprint kan støde på modstand fra amerikanske tilsynsmyndigheder Aktier i Sprint og T-Mobile væltede mandag på grund af bekymringer om, at deres foreslåede telecom-megafusion ville
Sprint, T-Mobile-aktier falder på grund af frygt for, at aftalen vil blive blokeretT-Mobiles køb af Sprint kan støde på modstand fra amerikanske tilsynsmyndigheder Aktier i Sprint og T-Mobile væltede mandag på grund af bekymringer om, at deres foreslåede telecom-megafusion ville
- Sådan fungerer lasere
- Udnytte kraften i AI og højtydende computing for at udvide evolution til superledere
- Rekordstore Alper-postkort sender besked mod klimaændringer
- Hvad er forskellen mellem termisk energi og solenergi?
- Årsager til barometrisk tryk på Drop
- Batteriforskning:nye gennembrud inden for forskning i superbatterier