


Team udvikler robothånd, der er i stand til at håndtere æg og skære papir med saks
Taktil sensor-integreret robothånd. Kredit:Korea Institute of Machinery and Materials (KIMM)
Korea Institute of Machinery &Materials (præsident Chunhong Park; i det følgende benævnt "KIMM") udviklede en robothånd, der er i stand til at håndtere forskellige genstande og værktøjer i dagligdagen, såsom at holde et æg og skære papir med en saks. Hånden kan let monteres på en række robotarme, og tilbyder verdens stærkeste gribekraft mod sin egen vægt. Det forventes, at brugen af robotiske hænder vil blive udvidet til at omfatte industriområder såvel som til hverdag.
Teamet ledet af Dr. Hyunmin Do, hovedforsker ved Institut for Robotik og Mekatronik under KIMMs afdeling for avancerede fremstillingssystemer, udviklet en robothånd, der er i stand til at håndtere objekter på samme måde som menneskehænder ved at efterligne strukturen og bevægelsen af en menneskelig finger.
Robothånden består af fire fingre og 16 led. I alt 12 motorer bruges til at flytte hver finger og led uafhængigt.
Forskerteamet udviklede en unik mekanisme til at understøtte bevægelse i små rum med en høj grad af frihed, ligner en menneskelig hånds bevægelse. Det lykkedes dem at modulere driverenheden, der er ansvarlig for fingerbevægelse, ved at indlejre den i håndfladen. Robothånden kan let monteres på en række forskellige robotarme.
Ud over, den udviklede robothånd er lettere og stærkere end kommercielt tilgængelige robothænder. Dens vægt er mindre end 1 kg, men dens nyttelast er mere end 3 kg.
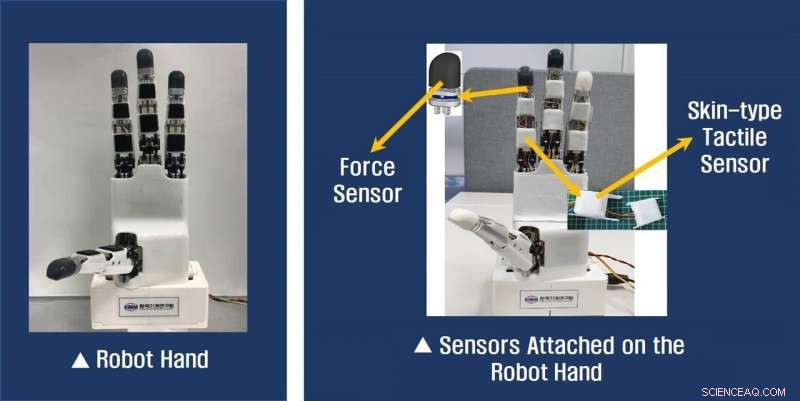
Forskergruppen udviklede to typer kraftsensorer for at tillade taktil sansning at detektere kontakt med objekter, og fastgjorde dem til fingerspidserne, fingre og håndfladen. Sensorerne, der er fastgjort til fingerspidserne, er flerakse kraft-/momentfølere med en diameter på 15 mm og en vægt på mindre end 5 g. De kan måle størrelsen og kraftretningen, der opdages ved fingerspidsen, når robothånden kommer i kontakt med et objekt. Sensorerne er nøglen til at kontrollere grebkraften.
Hudtype taktile sensorer udviklet gennem fælles forskning med Seoul National University blev også knyttet til fingre og håndflade. Disse sensorer måler kraftfordelingen ved kontaktområdet, når robothånden rører ved et objekt.
Kommercielle robothænder, der hidtil er udviklet, har begrænsede applikationer, da der ikke er modulopbyggede produkter udstyret med både drivenhederne indlejret inde i håndfladen og de indbyggede taktile sensorer.
Dr. Hyunmin Do sagde, "Robothånden blev udviklet til at håndtere forskellige objekter, herunder de værktøjer, der bruges i hverdagen ved at efterligne den sarte bevægelse af en menneskelig hånd. Det forventes også at blive brugt som en forskningsplatform til at studere den gribende algoritme for robothånd og manipulation intelligens. "
 Varme artikler
Varme artikler
-
 Amazon opfordrer til regeringsregulering af ansigtsgenkendelsesteknologiAmazon, hvis grundlægger og administrerende direktør Jeff Bezos ses her, opstillet en række principper for virksomhedsansvar, herunder opfordring til regulering af ansigtsgenkendelsesteknologi Ama
Amazon opfordrer til regeringsregulering af ansigtsgenkendelsesteknologiAmazon, hvis grundlægger og administrerende direktør Jeff Bezos ses her, opstillet en række principper for virksomhedsansvar, herunder opfordring til regulering af ansigtsgenkendelsesteknologi Ama -
 CBS i forhandlinger om exit for anklagede CEO Moonves:medierCBS rapporteres at forhandle om en exit på flere millioner dollars til administrerende direktør Leslie Moonves, der står over for anklager om seksuel forseelse Bestyrelsen for den amerikanske tv-g
CBS i forhandlinger om exit for anklagede CEO Moonves:medierCBS rapporteres at forhandle om en exit på flere millioner dollars til administrerende direktør Leslie Moonves, der står over for anklager om seksuel forseelse Bestyrelsen for den amerikanske tv-g -
 Æble, Goldman Sachs samarbejder om kreditkort:rapport (opdatering)En medierapport siger, at Apple arbejder sammen med investeringsgiganten Goldman Sachs om et co-branded kreditkort, der promoverer Apple Pays digitale tegnebog Apple arbejder sammen med den finans
Æble, Goldman Sachs samarbejder om kreditkort:rapport (opdatering)En medierapport siger, at Apple arbejder sammen med investeringsgiganten Goldman Sachs om et co-branded kreditkort, der promoverer Apple Pays digitale tegnebog Apple arbejder sammen med den finans -
 Californien sigter mod at droppe fossile brændstoffer til elektricitet inden 2045 (Opdatering)guvernør Jerry Brown, underskriver en kopi af miljøforanstaltningen SB100 som lovforslagets forfatter, statssenator Kevin de Leon, ret, har en kopi af regningen, Mandag, 10. september, 2018, i Sacrame
Californien sigter mod at droppe fossile brændstoffer til elektricitet inden 2045 (Opdatering)guvernør Jerry Brown, underskriver en kopi af miljøforanstaltningen SB100 som lovforslagets forfatter, statssenator Kevin de Leon, ret, har en kopi af regningen, Mandag, 10. september, 2018, i Sacrame
- Ny varmemodel kan hjælpe elektroniske enheder med at holde længere
- Små legoklodser bygger Janus nanorør med potentiale til nye lægemidler og vandrensning
- DeepMind bruger neurale netværk til at hjælpe med at forklare meta-læring hos mennesker
- Virus, orkansæson forsinkelse fjernelse af ødelagt lastskib
- Sådan beregnes lov om synder
- Sådan finder du hældning på TI Nspire