


Sensoriseret hud hjælper bløde robotter med at finde deres pejling

MIT-forskere har skabt en "sensoriseret" hud, lavet med kirigami-inspirerede sensorer, som giver bløde robotter større bevidsthed om deres kroppes bevægelse og position. Kredit:Ryan L. Truby, MIT CSAIL
For første gang, MIT-forskere har gjort det muligt for en blød robotarm at forstå dens konfiguration i 3D-rum, ved kun at udnytte bevægelses- og positionsdata fra sin egen "sensibiliserede" hud.
Bløde robotter konstrueret af meget kompatible materialer, svarende til dem, der findes i levende organismer, bliver forkæmpet som sikrere, og mere tilpasningsdygtige, robust, og bioinspirerede alternativer til traditionelle stive robotter. Men at give disse deformerbare robotter autonom kontrol er en monumental opgave, fordi de kan bevæge sig i et stort set uendeligt antal retninger på ethvert givet tidspunkt. Det gør det svært at træne planlægnings- og kontrolmodeller, der driver automatisering.
Traditionelle metoder til at opnå autonom kontrol bruger store systemer med flere motion-capture-kameraer, der giver robotterne feedback om 3D-bevægelser og positioner. Men de er upraktiske for bløde robotter i virkelige applikationer.
I et papir, der udgives i tidsskriftet IEEE Robotics and Automation Letters , forskerne beskriver et system af bløde sensorer, der dækker en robots krop for at give "proprioception" - hvilket betyder bevidsthed om bevægelse og position af dens krop. Denne feedback løber ind i en ny dyb-læringsmodel, der siver gennem støjen og fanger klare signaler for at estimere robottens 3D-konfiguration. Forskerne validerede deres system på en blød robotarm, der ligner en elefantsnabel, der kan forudsige sin egen position, mens den autonomt svinger rundt og strækker sig.
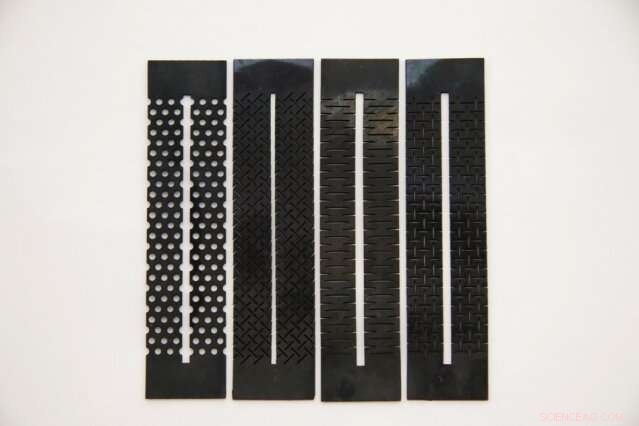
Forskernes bløde sensorer er ledende silikoneplader skåret i kirigami -mønstre. De har "piezoresistive" egenskaber, hvilket betyder, at de ændrer sig i elektrisk modstand, når de belastes. Når sensoren deformeres som reaktion på robotarmens strækning og komprimering, dens elektriske modstand konverteres til en udgangsspænding, der derefter bruges som et signal, der korrelerer med den bevægelse. Kredit:Ryan L. Truby, MIT CSAIL
Sensorerne kan fremstilles ved hjælp af hyldematerialer, hvilket betyder, at ethvert laboratorium kan udvikle deres egne systemer, siger Ryan Truby, en postdoc i MIT Computer Science and Artificial Laboratory (CSAIL), som er medførsteforfatter på papiret sammen med CSAIL postdoc Cosimo Della Santina.
"Vi sensoriserer bløde robotter for at få feedback til kontrol fra sensorer, ikke synssystemer, ved hjælp af en meget nem, hurtig fremstillingsmetode, "siger han." Vi vil bruge disse bløde robotstammer, for eksempel, at orientere og kontrollere sig selv automatisk, at samle ting op og interagere med verden. Dette er et første skridt mod den type mere sofistikeret automatiseret kontrol."
Et fremtidigt mål er at hjælpe med at lave kunstige lemmer, der mere behændigt kan håndtere og manipulere genstande i miljøet. "Tænk på din egen krop:Du kan lukke øjnene og rekonstruere verden baseret på feedback fra din hud, " siger medforfatter Daniela Rus, direktør for CSAIL og Andrew og Erna Viterbi professor i elektroteknik og datalogi. "Vi vil designe de samme muligheder for bløde robotter."
Forme bløde sensorer

Kredit:Massachusetts Institute of Technology
Et mangeårigt mål inden for blød robotik har været fuldt integrerede kropssensorer. Traditionelle stive sensorer forringer en blød robotkrops naturlige overensstemmelse, komplicere dets design og fremstilling, og kan forårsage forskellige mekaniske fejl. Blødt materiale-baserede sensorer er et mere egnet alternativ, men kræver specialiserede materialer og metoder til deres design, gør dem vanskelige for mange robotlaboratorier at fremstille og integrere i bløde robotter.
Mens han arbejdede i sit CSAIL-laboratorium en dag på udkig efter inspiration til sensormaterialer, Truby skabte en interessant forbindelse. "Jeg fandt disse ark af ledende materialer brugt til elektromagnetisk interferensafskærmning, som du kan købe overalt i ruller, "siger han. Disse materialer har" piezoresistive "egenskaber, hvilket betyder, at de ændrer sig i elektrisk modstand, når de belastes. Truby indså, at de kunne lave effektive bløde sensorer, hvis de blev placeret på bestemte steder på stammen. Når sensoren deformeres som reaktion på stammens strækning og komprimering, dens elektriske modstand omdannes til en bestemt udgangsspænding. Spændingen bruges derefter som et signal, der korrelerer med denne bevægelse.
Men materialet strakte sig ikke meget, hvilket ville begrænse dens anvendelse til blød robotteknologi. Inspireret af kirigami - en variation af origami, der inkluderer at lave snit i et materiale - Truby designet og laserskåret rektangulære strimler af ledende silikoneplader i forskellige mønstre, såsom rækker af små huller eller krydsende skiver som et kædehegn. Det gjorde dem langt mere fleksible, strækbar, "og smuk at se på, " siger Truby.
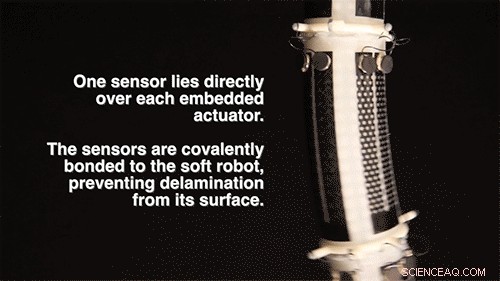
Forskernes robotstamme består af tre segmenter, hver med fire fluidiske aktuatorer (12 i alt), der bruges til at bevæge armen. De smeltede en sensor over hvert segment, med hver sensor, der dækker og indsamler data fra én indbygget aktuator i den bløde robot. De brugte "plasmabinding, " en teknik, der giver energi til en overflade af et materiale for at få det til at binde til et andet materiale. Det tager cirka et par timer at forme snesevis af sensorer, der kan bindes til de bløde robotter ved hjælp af en håndholdt plasmabindingsenhed.

Kredit:Massachusetts Institute of Technology
Som antaget, sensorerne fangede bagagerummets generelle bevægelse. Men de var virkelig støjende. "I bund og grund, de er ikke-ideelle sensorer på mange måder, " siger Truby. "Men det er bare en almindelig kendsgerning ved at lave sensorer af bløde ledende materialer. Højere og mere pålidelige sensorer kræver specialiserede værktøjer, som de fleste robotlaboratorier ikke har. "
For at estimere den bløde robots konfiguration kun ved hjælp af sensorerne, forskerne byggede et dybt neuralt netværk til at udføre det meste af de tunge løft, ved at sigte gennem støjen for at fange meningsfulde feedbacksignaler. Forskerne udviklede en ny model til kinematisk at beskrive den bløde robots form, der i høj grad reducerer antallet af variabler, der er nødvendige for, at deres model kan behandle.
Kredit:Ryan L. Truby, MIT CSAIL
I eksperimenter, forskerne fik bagagerummet til at svinge rundt og udvide sig i tilfældige konfigurationer over cirka halvanden time. De brugte det traditionelle motion-capture-system til grundsandsdata. I træning, modellen analyserede data fra sine sensorer for at forudsige en konfiguration, og sammenlignede dens forudsigelser med de grundsandhedsdata, som blev indsamlet samtidigt. Derved, modellen "lærer" at kortlægge signalmønstre fra dens sensorer til konfigurationer i den virkelige verden. Resultater angivet, at for visse og mere stabile konfigurationer, robottens anslåede form matchede sandheden.
Næste, forskerne sigter mod at udforske nye sensordesigns for forbedret følsomhed og at udvikle nye modeller og dyb-læringsmetoder for at reducere den nødvendige træning for hver ny blød robot. De håber også at forfine systemet for bedre at fange robotens fulde dynamiske bevægelser.
I øjeblikket, det neurale netværk og sensorhuden er ikke følsomme over for at fange subtile bevægelser eller dynamiske bevægelser. Men, for nu, dette er et vigtigt første skridt for læringsbaserede tilgange til blød robotstyring, Truby siger:"Ligesom vores bløde robotter, levende systemer behøver ikke at være helt præcise. Mennesker er ikke præcise maskiner, sammenlignet med vores stive robotmodstande, og vi har det fint."
Denne historie er genudgivet med tilladelse fra MIT News (web.mit.edu/newsoffice/), et populært websted, der dækker nyheder om MIT-forskning, innovation og undervisning.
 Varme artikler
Varme artikler
-
 En ny tilgang til uovervåget omskrivning uden oversættelseArkitektur af encoder foreslået af forskerne. Kredit:Roy &Grangier. I de seneste år, forskere har forsøgt at udvikle metoder til automatisk omskrivning, hvilket i det væsentlige indebærer den auto
En ny tilgang til uovervåget omskrivning uden oversættelseArkitektur af encoder foreslået af forskerne. Kredit:Roy &Grangier. I de seneste år, forskere har forsøgt at udvikle metoder til automatisk omskrivning, hvilket i det væsentlige indebærer den auto -
 Udklipsholder suget ind i flymotoren:Australiens regulatorJetStar har opdateret sine procedurer, siden et klippekort blev suget ind i motoren på et af dets fly En udklipsholder, der blev efterladt under kontrol før flyvning, blev suget ind i jetmotoren p
Udklipsholder suget ind i flymotoren:Australiens regulatorJetStar har opdateret sine procedurer, siden et klippekort blev suget ind i motoren på et af dets fly En udklipsholder, der blev efterladt under kontrol før flyvning, blev suget ind i jetmotoren p -
 Elon Musk siger, at testtunnelen i LA-området er næsten færdig (opdatering)Elon Musk, Tesla Factory, Fremont (CA, USA) i 2011. Kredit:CC BY 2.0 Milliardæren Elon Musk siger, at han næsten har færdiggjort en tunnel under en forstad til Los Angeles for at teste et nyt tran
Elon Musk siger, at testtunnelen i LA-området er næsten færdig (opdatering)Elon Musk, Tesla Factory, Fremont (CA, USA) i 2011. Kredit:CC BY 2.0 Milliardæren Elon Musk siger, at han næsten har færdiggjort en tunnel under en forstad til Los Angeles for at teste et nyt tran -
 Høste energi fra det menneskelige knæDiagram over skyder-krankmekanismen, der genererer energi under knæets bevægelse. Kredit:Gao et al. Forestil dig at forsyne dine enheder ved at gå. Med teknologi for nylig udviklet af en gruppe fo
Høste energi fra det menneskelige knæDiagram over skyder-krankmekanismen, der genererer energi under knæets bevægelse. Kredit:Gao et al. Forestil dig at forsyne dine enheder ved at gå. Med teknologi for nylig udviklet af en gruppe fo
- Hvad er chromatinernes funktion?
- Farlige materialer i sunket fragtskib ud for Frankrig:myndigheder
- I en tid med teamvidenskab, er Nobels ude af trit?
- Ny enhed kan øge batterilevetiden for elektroniske enheder mere end hundrede gange
- Forskere udvikler verdens første optiske transmitter af silicium ved 100 Gbps
- Liste over ting, der Tadpoles Eat