


OmniTact:En kompakt og højopløsnings taktil sensor til robotapplikationer
En menneskelig tommelfinger ved siden af OmniTact og en amerikansk penny; viser størrelsen af sensoren. Kredit:Padmanabha et al.
I de seneste år, forskere verden over har forsøgt at udvikle sensorer, der kunne genskabe menneskers følesans i robotter og forbedre deres manipulationsevner. Mens nogle af disse sensorer opnåede bemærkelsesværdige resultater, de fleste eksisterende løsninger har små følsomme felter eller kan kun samle billeder med lav opløsning.
Et team af forskere ved UC Berkeley har for nylig udviklet en ny multi-retningsbestemt taktil sensor, kaldet OmniTact, der overvinder nogle af begrænsningerne ved tidligere udviklede sensorer. OmniTact, præsenteret i et papir, der er forududgivet på arXiv og skal præsenteres på ICRA 2020, fungerer som en kunstig fingerspids, der giver robotter mulighed for at fornemme egenskaberne af genstande, den holder eller manipulerer.
"Vores laboratorium erkendte behovet for en sensor til generelle robotmanipulationsopgaver med udvidede muligheder end nuværende taktile sensorer, "Frederik Ebert, en af de forskere, der har udført undersøgelsen, fortalte TechXplore. "Eksisterende taktile sensorer er enten flade, har små følsomme felter eller giver kun signaler med lav opløsning. For eksempel, GelSight-sensoren giver høj opløsning (dvs. 400x400 pixel) billeder, men er store og flade, giver følsomhed på kun den ene side, mens OptoForce-sensoren er buet, men giver kun kraftaflæsninger på et enkelt punkt."
OmniTact, sensoren udviklet af Ebert og hans kolleger, er en tilpasning af GelSight, en taktil sensor skabt af forskere ved MIT og UC Berkeley. GelSight kan generere detaljerede 3D-kort af et objekts overflade og registrere nogle af dets egenskaber.
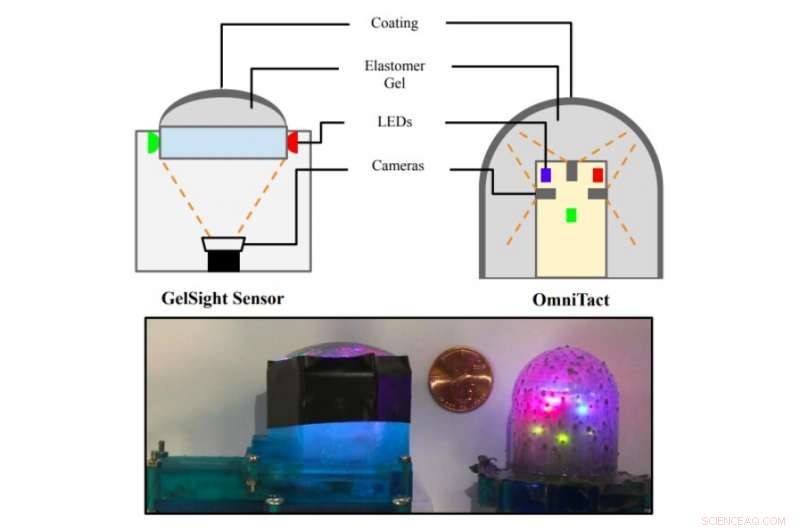
En illustration og et billede, der forklarer de grundlæggende forskelle mellem GelSight-sensoren og OmniTact. Kredit:Padmanabha et al.
I modsætning til GelSight, OmniTact er multi-retningsbestemt, hvilket betyder, at alle dens sider har sanseevner. Ud over, det kan give aflæsninger i høj opløsning, er meget kompakt og har en buet form. Når den er integreret i en griber eller robothånd, sensoren fungerer som en følsom kunstig finger, ", der giver robotten mulighed for at manipulere og fornemme en bred vifte af objekter, der varierer i form og størrelse.
OmniTact blev bygget ved at indlejre flere mikrokameraer i en kunstig hud lavet af silikonegel. Kameraerne registrerer multi-direktionelle deformationer af den gel-baserede hud, producerer et rigt signal, der derefter kan analyseres ved hjælp af computersyn og billedbehandlingsteknikker for at udlede information om de objekter, som en robot manipulerer.
"Vores team bruger læringsbaserede tilgange til at gøre brug af feedback i høj opløsning og undgå manuelle kalibreringsprocedurer, "Akhil Padmanabha, en anden forsker involveret i undersøgelsen, fortalte TechXplore. "OmniTact giver berøringsføling på alle sider af sensoren, dermed giver robotter adgang til taktil feedback, mens de får kontakt med objekter i enhver retning."
Ebert, Padmanabha og deres kolleger evaluerede deres sensors ydeevne på en ret udfordrende opgave, hvor en robot skulle sætte et elektrisk stik ind i en stikkontakt. De testede også dens evne til at udlede kontaktvinklen for en finger, når den pressede mod en given genstand. I disse indledende evalueringer, OmniTact opnåede bemærkelsesværdige resultater, udkonkurrerer både en taktil sensor, der kun er følsom på den ene side, og en anden multi-retningssensor i tilstandsestimateringsopgaven.
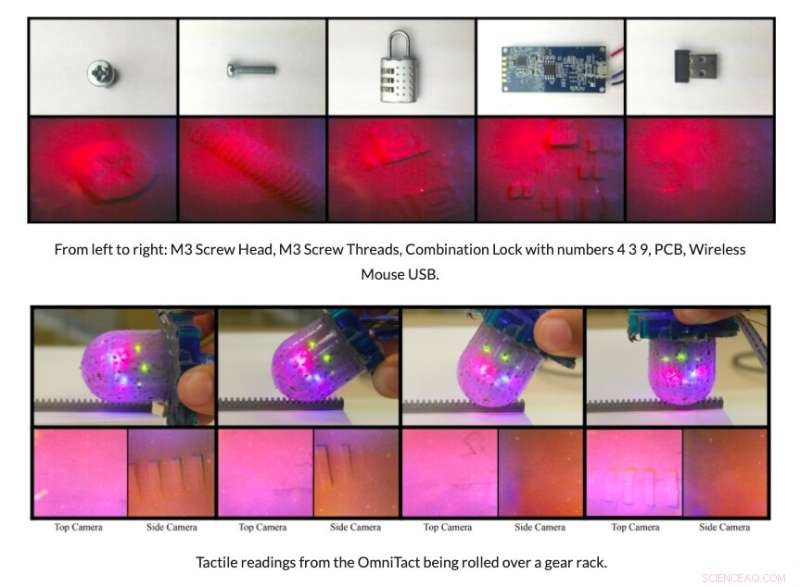
Kredit:Padmanabha et al.
"Gennem vores eksperimenter med OmniTact, vi opdagede, at multi-directional, Taktil sansning med høj opløsning muliggør visse finkornede manipulationsopgaver, såsom den forbindelsesindsættelsesopgave, vi præsenterede, "Stephen Tian, en anden forsker involveret i undersøgelsen, fortalte TechXplore. "Vi har mistanke om, at multi-directional taktil sansning i fremtiden kan være et væsentligt element i generel robotmanipulation ud over applikationer som robot teleoperation i kirurgi, såvel som i hav- og rummissioner."
Forskerne byggede deres sensor ved hjælp af mikrokameraer, der typisk bruges i endoskoper, støbning af silikonegelen direkte på kameraerne. Som resultat, OmniTact er langt mere kompakt end tidligere udviklede GelSight-sensorer og kunne dermed have en bredere vifte af mulige anvendelser. I fremtiden, det kunne bane vejen for skabelsen af nye robotter med mere sofistikerede sansefunktioner.
"Vi planlægger at gøre OmniTact billigere og mere kompakt, gør det muligt at bruge det til en bredere vifte af opgaver. Vores team planlægger desuden at udføre mere robotmanipulationsforskning, der vil informere fremtidige generationer af taktile sensorer, " sagde Padmanabha.
© 2020 Science X Network
 Varme artikler
Varme artikler
-
 Tysk posthus leverer elbil overraskelseMiroslav Arapovic siger, at det nye leveringskøretøj er mindre støjende og bedre integreret i miljøet På tyske gader, der køres af store SUVer og brølende forbrændingsmotorer, de små, legetøjslign
Tysk posthus leverer elbil overraskelseMiroslav Arapovic siger, at det nye leveringskøretøj er mindre støjende og bedre integreret i miljøet På tyske gader, der køres af store SUVer og brølende forbrændingsmotorer, de små, legetøjslign -
 Kinas politi buster bitcoin-minearbejdere for at stjæle 3 millioner dollars i elektricitetBitcoin kan produceres eller mineres af banker af computere, der løser komplekse algoritmer Politiet i det østlige Kina har slået en ring af ulovlige bitcoin -minearbejdere, der stjal næsten $ 3 m
Kinas politi buster bitcoin-minearbejdere for at stjæle 3 millioner dollars i elektricitetBitcoin kan produceres eller mineres af banker af computere, der løser komplekse algoritmer Politiet i det østlige Kina har slået en ring af ulovlige bitcoin -minearbejdere, der stjal næsten $ 3 m -
 Foodora trækker sig ud af AustralienGigøkonomiske virksomheder som Foodora har i flere lande været udsat for kritik over behandlingen af arbejdere Madleveringsservice Foodora trækker sig ud af Australien, med det tyskbaserede firm
Foodora trækker sig ud af AustralienGigøkonomiske virksomheder som Foodora har i flere lande været udsat for kritik over behandlingen af arbejdere Madleveringsservice Foodora trækker sig ud af Australien, med det tyskbaserede firm -
 Ressourceeffektivt blødt eksoskelet til mennesker med gangbesværKredit:IIT Instituto Italiano di Tecnologia Mange mennesker har nedsat mobilitet i underbenene, men der er få bærbare teknologier, der gør dem i stand til at gå normalt, mens de udfører dagligdags
Ressourceeffektivt blødt eksoskelet til mennesker med gangbesværKredit:IIT Instituto Italiano di Tecnologia Mange mennesker har nedsat mobilitet i underbenene, men der er få bærbare teknologier, der gør dem i stand til at gå normalt, mens de udfører dagligdags
- Fejlagtig information kan formere sig med deepfake -videoer
- Hvad er råmaterialerne i plastflasker?
- Hvorfor er et jordskælvskonstruktivt?
- Fremkalder klimaengagement
- 200 millioner år gammel insektfarve afsløret af fossile skæl
- Sådan beregnes den endelige koncentration af en opløsning med forskellige koncentrationer