


En robot lavet af pinde
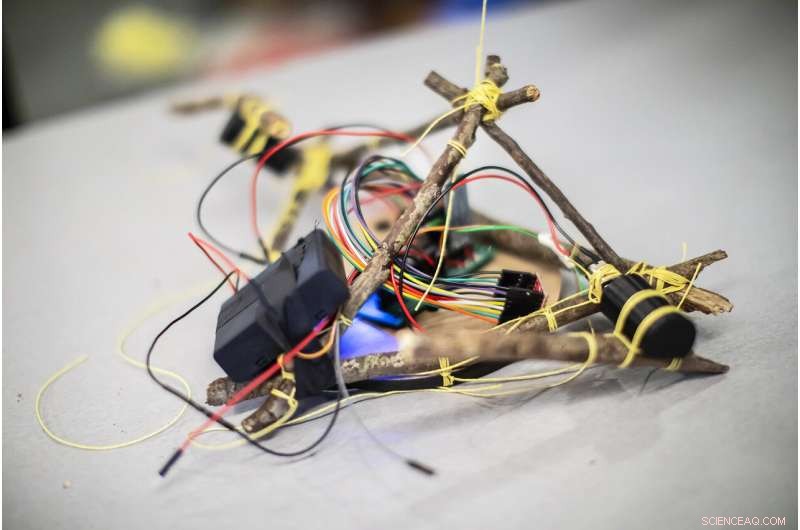
StickBot i gå-tilstand, ved at bruge stokkene som ben til at drive sig hen over bordet. Kredit:Eric Sucar/University of Pennsylvania
I sensommeren, lige da bladene begyndte at blive sprøde og krøllede i varmen, gik Devin Carroll ud af sin lejlighed, kiggede på jorden og samlede et par pinde op, som han troede kunne fungere for hans robot. Omkring en halv tomme tyk og længden af en voksen hånd fjernede han de tre pinde af deres bark og surrede dem med snor til StickBot, en modulær robot bestående af kredsløb, aktuatorer, en mikrocontroller og en motordriver.
Drevet af fire AA-batterier, forbundet med en labyrint af ledninger og blinkende lys, dunker StickBots træarme nu op og over og driver robotten hen over bordet på Penns General Robotics, Automation, Sensing &Perception (GRASP) Lab, hvor Carroll er en Ph.D. kandidat i Ingeniørhøjskolen.
Ved at styre robotten ved hjælp af en app, han har designet, viser Carroll, hvordan StickBot kan dreje fra at bruge pindene som ben i "crawler-tilstand" til at bruge dem som arme. I "grasper mode" er pindene fastgjort til en kontrolplade på den ene side for at danne et hængselled, mens de bevæger sig med deres frie ende for at holde en kop oprejst.
I stedet for en statisk, enestående opfindelse er StickBot en idé, et fleksibelt system, der kan omkonfigureres på en række forskellige måder. En modulær robot, StickBots komponenter kan tilføjes, justeres og kasseres efter behov.
Mark Yim, Carrolls rådgiver, har været hos Penn i 17 år og er den nuværende direktør for GRASP Lab. Den høje alsidighed af modulære robotter giver et stort potentiale for teknologiens udvikling, siger Yim. En iteration af dette er selvkonfigurerende robotter. "Folk er rigtig gode til at tilpasse sig forskellige miljøer:Når det bliver koldt, tager man en frakke på. Og det kan robotter også gøre. Men hvis robotter også kunne ændre deres form, gøre forskellige ting ... det giver dig flere muligheder."
Udover en robot lavet af pinde, har Carroll også bygget en robot lavet af is. Med en rektangulær krop og to store hjul ligner robotten en krydsning mellem en monstertruck og en Cushman-vogn. Det hedder selvfølgelig IceBot.
IceBot landede en 2020-post i Guinness Book of World Records som den første robot lavet helt af is (bortset fra dens motordriver og aktuatorer, som Carroll indlejrede i udskårne huller). Carroll håber, at denne teknologi vil blive brugt en dag til at udføre missioner i Antarktis eller på en iskold måne, muligvis som en selvkonfigurerende robot. For nu er det en måde at forfine hans ideer om modulære robotter.
"Lektionen lært fra IceBot," siger Carroll, "er, vær ikke bange for at prøve en skør ting. Det kan måske bare fungere."
Fundede genstande, genbrug af materialer
Med StickBot fortsatte Carroll sine kreative eksperimenter. Denne gang fokuserede han på at holde omkostningerne lave og skabe et simpelt system, der kunne udføre en række opgaver.
"StickBot er et robotsystem, der er beregnet til at give brugerne en stor mængde fleksibilitet til en ekstrem lav pris, og det gør vi ved at udnytte modulariteten af fundne materialer," siger Carroll. "Vi har en masse trægrene eller pinde, og vi er i stand til at samle dem til bindingsværksstrukturer i forskellige konfigurationer. På den måde kan vi få ting som en crawler-robot eller en griberobot eller i virkeligheden alt, hvad du kan forestille dig. Bagved StickBot er evnen til at omkonfigurere ting og gøre det ekstremt overkommeligt."
Carroll vurderer, at StickBots samlede byggeomkostninger er under hundrede dollars for en simpel model, selvom større systemer kan koste mere. Mens nogle komponenter (såsom aktuatorerne og motordriveren) er integreret i robottens funktion, kan andre udskiftes afhængigt af den opgave, der udføres, og materialerne ved hånden. (Carroll udforsker brugen af varm lim og gaffatape i stedet for snor.) Robotten burde kunne konstrueres af ting, folk måtte have ved hånden, siger han.
Reducer, genbrug og genbrug etos har været hos Carroll, siden han var ung. Carroll voksede op på en gård i det landlige Massachusetts. Han var medlem af 4-H; han opfostrede får. "Alt, hvad vi gjorde, var beregnet til at være vedvarende," siger Carroll. "Ved at bygge ting som lader eller skure ville vi forsøge at genbruge så meget materiale som muligt."
Senere tog Carroll til University of Massachusetts Amherst for maskinteknik og lavede et sommerprogram for Research Experience for Undergraduates (REU) på Harvard, hvor han byggede sin første robot. "Jeg var en anden på ingeniørskolen, havde ingen anelse om, hvad jeg ville lave," siger Carroll. "Jeg havde arbejdet den vinter i Harvard Forest, bare lavet vedligeholdelse for dem. En forsker kom hen til mig og sagde:"Du er en maskiningeniør, ikke?" Kan du bygge denne robot til mig?"
Carroll byggede robotten, "i det væsentlige en kasse med en masse sensorer," siger han, og designede en sporvognsbane i trækronen, tre stilladshøjder høje. Drevet af et solopladningsbatteri blev robotten designet til at krydse et område for at hjælpe økologer med at bestemme, hvor hurtigt skoven ville vokse igen efter en rydning.
Det var en indflydelsesrig oplevelse for en ung ingeniør. "Der var jeg, omgivet af økologi og træer og alle de forskere og videnskabsmænd. Folk der var meget fokuserede på, hvordan vi kan påvirke verden omkring os på en positiv måde og skabe en vedvarende ressource, så vi ikke bare bruger noget op. , vi giver faktisk tilbage."
Prisbillig og tilgængelig
En mulig anvendelse for en StickBot-lignende robot er rehabiliteringsindstillinger i global sundhedspleje, enten som en protese eller i terapi. Avancerede medicinske procedurer er alle godt og godt, siger Carroll, men er de overkommelige i alle omgivelser? Og når først den højteknologiske enhed går i stykker, hvor let kan den så rettes?
"Hvis vi kunne implementere robotsystemet som StickBot i et scenarie som det, kan vi pludselig få indflydelse på mange flere menneskers liv," siger Carroll. Fordi StickBot er en relativt simpel modulær robot, kan dens komponenter lettere repareres og udskiftes.
"Ved at give folk mulighed for at bruge materialer omkring dem, gør vi to ting," siger Carroll. "For det første reducerer vi omkostningerne til materialer, som er markeret. For det andet kan vi reducere kompleksiteten uden at reducere den operationelle funktion."
Det er bestemt en aktuel idé for global sundhed, siger Michelle J. Johnson, lektor i fysisk medicin og rehabilitering ved Penns Perelman School of Medicine. Johnson, der er direktør for rehab-robotlaboratoriet (A GRASP Lab), forsker også i Botswana. "Et af de store problemer er overkommelighed," siger hun. Der er behov for at støtte klinikere i lavere ressourcer, men hvordan gør vi det?"
Konceptet med overkommelige robotter, der udnytter materiale, der er lokalt og rigeligt, er overbevisende, siger Johnson, for når materialer og elektronik skal importeres, kan omkostningerne stige hurtigt.
En modulær robot kan også tilpasses, og sundhedsklinikker kan investere i robottens funktionalitet over tid. "Måske har du råd til kun ét modul i dag, og i morgen har du råd til det andet, og nu har du et system, du kan bruge på flere måder," siger Johnson. "Du kan bygge, mens du går."
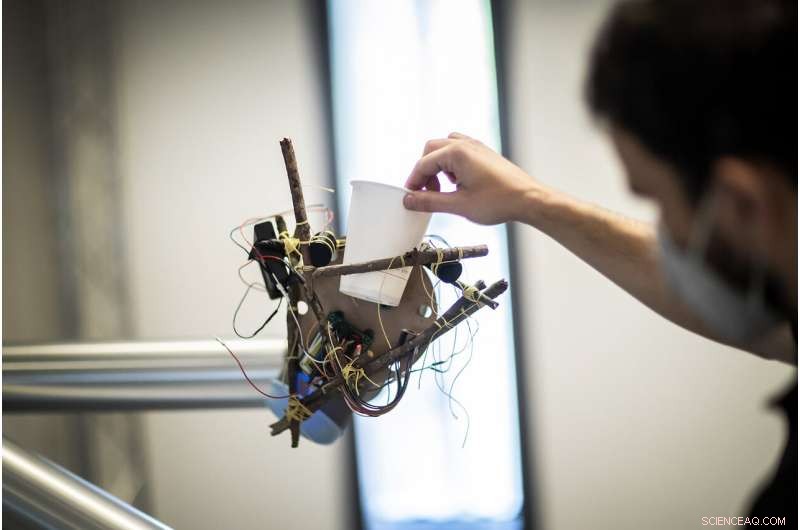
Carroll justerer StickBot til at arbejde i gribetilstand, hvor robotten holder en kaffekop. Kredit:Eric Sucar/University of Pennsylvania
StickBot-systemet har potentiale til at blive brugt som en social, terapi-, protese- eller assisterende robot, siger Johnson. I Botswana har nogle af Johnsons patienter HIV, som kan udløse slagtilfælde. En terapeutisk robot som StickBot kunne bruges til at understøtte et øjeblikkeligt funktionelt behov eller hjælpe patienter med at udføre en fysioterapiøvelse, siger hun.
Den funktionelle anvendelse af ideer er vigtig for Carroll. Han ønsker, at alle skal have adgang til interessant design, der har potentialet til at forbedre liv.
"Har du set "Big Hero 6'?" spørger Carroll. Han mener, at Disney-filmen burde være påkrævet visning, i det mindste for dem, der er interesserede i robotteknologi. I den deltager helten i en ingeniørpræsentation for studerende og holder sin opfindelse op - noget der ligner en lille jernfil, mindre end en lillefinger. Publikum er ikke imponeret. Så viser helten, hvad tusindvis af disse små doohickeys kan. De modulære robotter kobler sammen og går i stykker igen, bygger ubesværet stilladser og skaber en på hovedet bevægende gangbro. Mulighederne er kun begrænset af heltens fantasi.
"At have fleksibiliteten til at gøre flere ting betyder, at du kan hjælpe flere mennesker," siger Carroll. "Og hvis du kan gøre det billigt, er det endnu bedre." + Udforsk yderligere
En robot lavet af is kunne tilpasse sig og reparere sig selv på andre verdener
 Varme artikler
Varme artikler
-
 Sjove tricks mulige med Google vidensbokse, der er uden grin for nogleEksempel på en Google-søgning med et Knowledge Graph-kort til højre. Kredit:wietzebeukema.nl Hunde, der så på Google, var forståeligt nok glade, hvis ikke lettede, over at rapportere, at Google så
Sjove tricks mulige med Google vidensbokse, der er uden grin for nogleEksempel på en Google-søgning med et Knowledge Graph-kort til højre. Kredit:wietzebeukema.nl Hunde, der så på Google, var forståeligt nok glade, hvis ikke lettede, over at rapportere, at Google så -
 I hans opgave:Afrikansk fintech -iværksætter hjælper migranter med at flytte pengeWorldRemit -grundlægger Ismail Ahmed Pengeoverførselsforretningen er personlig for Ismail Ahmed. Det var kontanter fra hans familie, der gjorde det muligt for ham at tage den sidste del af sin rejs
I hans opgave:Afrikansk fintech -iværksætter hjælper migranter med at flytte pengeWorldRemit -grundlægger Ismail Ahmed Pengeoverførselsforretningen er personlig for Ismail Ahmed. Det var kontanter fra hans familie, der gjorde det muligt for ham at tage den sidste del af sin rejs -
 Nye robotter indstillet til at omdanne landbrugetKredit:EAKNARNARIN JITONG, Shutterstock Europæiske forbrugere forventer, at en ren forsyningskæde og biodiversitet bevares. Derfor, det er påkrævet at reducere tilførslerne af pesticider og kemisk
Nye robotter indstillet til at omdanne landbrugetKredit:EAKNARNARIN JITONG, Shutterstock Europæiske forbrugere forventer, at en ren forsyningskæde og biodiversitet bevares. Derfor, det er påkrævet at reducere tilførslerne af pesticider og kemisk -
 WPI-ingeniører skaber miniaturiseret, trådløs iltsensor til syge spædbørnProfessor Ulkuhan Guler viser en tidlig prototype af den miniaturiserede, bærbar enhed, der en dag vil overvåge spædbørns iltindhold i blodet. Kredit:Worcester Polytechnic Institute Forskere ved W
WPI-ingeniører skaber miniaturiseret, trådløs iltsensor til syge spædbørnProfessor Ulkuhan Guler viser en tidlig prototype af den miniaturiserede, bærbar enhed, der en dag vil overvåge spædbørns iltindhold i blodet. Kredit:Worcester Polytechnic Institute Forskere ved W
- Hvordan veje kan hjælpe med at afkøle sydende byer
- Forbehold om den økonomiske hype:Professionel sport har ringe effekt på turisme dollars
- Storbritannien søger garanti for at få adgang til Cambridge Analytica -servere (opdatering)
- DNA nanoteknologi sikkert til medicinsk brug, tyder ny undersøgelse
- Brændstofeffektiv teknologi kan true klimaet, Folkesundhed
- T. Rex snerrer til besøgende i Paris botaniske have