


Kan øjne på selvkørende biler reducere antallet af ulykker?

Vognen var udstyret med robotøjne, som kunne flyttes i enhver retning, styret af en af forskerholdet. Forruden var dækket til for at give indtryk af, at der ikke var nogen fører inde. Kredit:Chang et al. 2022
Robotøjne på autonome køretøjer kan forbedre fodgængernes sikkerhed, ifølge en ny undersøgelse ved University of Tokyo. Deltagerne spillede scenarier i virtual reality (VR) og skulle beslutte, om de skulle krydse en vej foran et køretøj i bevægelse eller ej. Når køretøjet var udstyret med robotøjne, som enten kiggede på fodgængeren (registrerede deres tilstedeværelse) eller væk (ikke registrerede dem), var deltagerne i stand til at træffe sikrere eller mere effektive valg.
Selvkørende køretøjer ser ud til at være lige rundt om hjørnet. Uanset om de skal levere pakker, pløje marker eller transportere børn til skole, er der en masse forskning i gang for at gøre en engang futuristisk idé til virkelighed.
Mens den største bekymring for mange er den praktiske side af at skabe køretøjer, der autonomt kan navigere i verden, har forskere ved Tokyo University vendt deres opmærksomhed mod en mere "menneskelig" bekymring for selvkørende teknologi. "Der er ikke tilstrækkelig undersøgelse af samspillet mellem selvkørende biler og mennesker omkring dem, såsom fodgængere. Så vi har brug for mere undersøgelse og indsats i sådan interaktion for at bringe sikkerhed og sikkerhed til samfundet vedrørende selvkørende biler," sagde Professor Takeo Igarashi fra Graduate School of Information Science and Technology.
En vigtig forskel med selvkørende køretøjer er, at chauffører kan blive mere af en passager, så de er måske ikke fuldt opmærksomme på vejen, eller der er måske slet ingen ved rattet. Dette gør det svært for fodgængere at vurdere, om et køretøj har registreret deres tilstedeværelse eller ej, da der muligvis ikke er øjenkontakt eller indikationer fra personerne i det.
Så hvordan kunne fodgængere blive gjort opmærksomme på, når et selvkørende køretøj har bemærket dem og har til hensigt at stoppe? Som en karakter fra Pixar-filmen Cars, var en selvkørende golfvogn udstyret med to store, fjernbetjente robotøjne. Forskerne kaldte den "den stirrende bil". De ønskede at teste, om det ville påvirke folks mere risikable adfærd at sætte bevægelige øjne på vognen, i dette tilfælde om folk stadig ville krydse vejen foran et kørende køretøj, når de havde travlt.
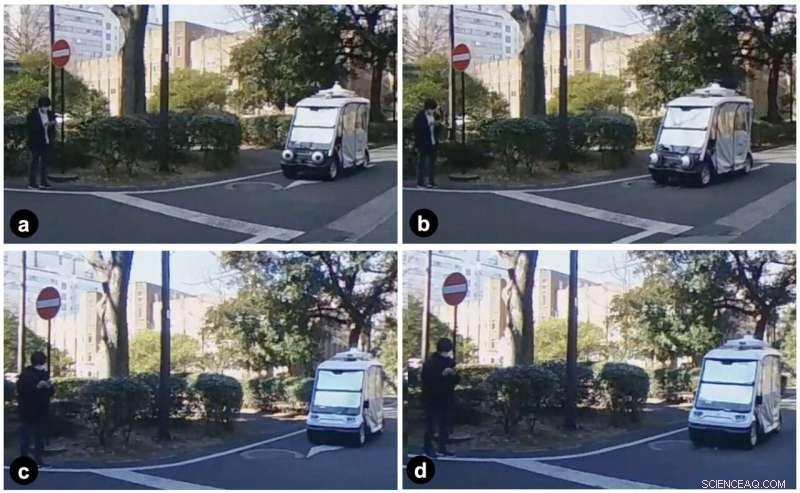
I eksperimentet skulle deltagerne beslutte, om vognen havde bemærket dem og skulle stoppe. Billederne viser førstepersonsvisning af en deltager. I (a) er vognen opmærksom på deltageren (sikker at krydse); i (b) vognen er ikke opmærksom på deltageren (utrygt at krydse); og i (c) og (d) ved deltageren det ikke. Kredit:Chang et al. 2022
Holdet opstillede fire scenarier, to hvor vognen havde øjne og to uden. Vognen havde enten bemærket fodgængeren og havde til hensigt at stoppe eller havde ikke bemærket dem og skulle køre videre. Når vognen havde øjne, ville øjnene enten kigge mod fodgængeren (vil standse) eller kigge væk (ikke standse).
Da det naturligvis ville være farligt at bede frivillige om at vælge, om de ville gå foran et køretøj i bevægelse i det virkelige liv (selvom der var en skjult chauffør til dette eksperiment), optog holdet scenarierne ved hjælp af 360-graders videokameraer og 18 deltagere (ni kvinder og ni mænd, i alderen 18-49 år, alle japanske) gennemlevede eksperimentet i VR. De oplevede scenarierne flere gange i tilfældig rækkefølge og fik tre sekunder hver gang til at beslutte, om de ville krydse vejen foran vognen eller ej. Forskerne registrerede deres valg og målte fejlprocenterne for deres beslutninger, det vil sige hvor ofte de valgte at stoppe, når de kunne have krydset, og hvor ofte de krydsede, når de skulle have ventet.
"Resultaterne tydede på en klar forskel mellem køn, hvilket var meget overraskende og uventet," sagde projektlektor Chia-Ming Chang, et medlem af forskerholdet. "Mens andre faktorer som alder og baggrund også kan have haft indflydelse på deltagernes reaktioner, mener vi, at dette er en vigtig pointe, da det viser, at forskellige trafikanter kan have forskellig adfærd og behov, som kræver forskellige kommunikationsmåder i vores fremtidige selvkørende. verden.
"I denne undersøgelse traf de mandlige deltagere mange farlige beslutninger om vejkrydsning (dvs. at vælge at krydse, når bilen ikke stoppede), men disse fejl blev reduceret af vognens øjenblik. Der var dog ikke den store forskel i sikre situationer for dem (dvs. at vælge at krydse, da bilen skulle standse),« forklarede Chang.
"På den anden side traf de kvindelige deltagere mere ineffektive beslutninger (dvs. at de valgte ikke at krydse, når bilen havde til hensigt at stoppe), og disse fejl blev reduceret af vognens øjenblik. Der var dog ikke den store forskel i usikre situationer for dem." I sidste ende viste eksperimentet, at øjnene resulterede i en jævnere eller sikrere krydsning for alle.
Men hvordan fik øjnene deltagerne til at føle sig? Nogle syntes, de var søde, mens andre så dem som uhyggelige eller skræmmende. For mange mandlige deltagere, når øjnene kiggede væk, rapporterede de, at de følte, at situationen var mere farlig. For kvindelige deltagere, når øjnene kiggede på dem, sagde mange, at de følte sig tryggere.
"Vi fokuserede på øjnenes bevægelse, men var ikke for meget opmærksomme på deres visuelle design i denne særlige undersøgelse. Vi har netop bygget den enkleste for at minimere omkostningerne ved design og konstruktion på grund af budgetmæssige begrænsninger," forklarede Igarashi. "I fremtiden ville det være bedre at få en professionel produktdesigner til at finde det bedste design, men det ville nok stadig være svært at tilfredsstille alle. Jeg personligt kan lide det. Det er lidt sødt."
Holdet erkender, at denne undersøgelse er begrænset af det lille antal deltagere, der kun spiller ét scenarie. Det er også muligt, at folk kan træffe forskellige valg i VR sammenlignet med det virkelige liv. Men "at gå fra manuel kørsel til autokørsel er en kæmpe forandring. Hvis øjne rent faktisk kan bidrage til sikkerheden og reducere trafikulykker, bør vi seriøst overveje at tilføje dem. I fremtiden vil vi gerne udvikle automatisk styring af de koblede robotøjne til den selvkørende AI (i stedet for at blive manuelt styret), som kunne rumme forskellige situationer," sagde Igarashi. "Jeg håber, at denne forskning opmuntrer andre grupper til at prøve lignende ideer, alt, hvad der letter et bedre samspil mellem selvkørende biler og fodgængere, hvilket i sidste ende redder folks liv."
Undersøgelsen blev offentliggjort som en del af Proceedings of the 14th International Conference on Automotive User Interfaces and Interactive Vehicular Applications . + Udforsk yderligere
At forbinde selvkørende biler med trafiksignaler kan hjælpe fodgængere med at give dem grønt lys
 Varme artikler
Varme artikler
-
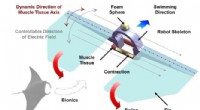 En manta ray-inspireret biosynkret robot med stabil styring via dynamisk elektrisk stimulationDenne biosynkretiske svømmer var sammensat af en skeletstruktur, to finner, en levende aktuator og en skumbalancemikrokugle. Kredit:Chuang Zhang, Shenyang Institute of Automation, Chinese Academy of S
En manta ray-inspireret biosynkret robot med stabil styring via dynamisk elektrisk stimulationDenne biosynkretiske svømmer var sammensat af en skeletstruktur, to finner, en levende aktuator og en skumbalancemikrokugle. Kredit:Chuang Zhang, Shenyang Institute of Automation, Chinese Academy of S -
 Næsten virkelighed:Fremtidige fabrikker drevet af digitale tvillingerKredit:Advanced Remanufacturing and Technology Center A*STAR har bygget en testseng til digitale tvillinger, de virtuelle modstykker til ægte produktionsudstyr. Disse fabriksinnovationer kan hjælp
Næsten virkelighed:Fremtidige fabrikker drevet af digitale tvillingerKredit:Advanced Remanufacturing and Technology Center A*STAR har bygget en testseng til digitale tvillinger, de virtuelle modstykker til ægte produktionsudstyr. Disse fabriksinnovationer kan hjælp -
 Huawei slutter sig til den smarte højttalerskare med en fremragende routerSmart-højttalere repræsenterer en produktkategori, der ikke forsvinder i den nærmeste fremtid. En combo smart højttaler-internetrouter er i nyhederne. Det er combo-delen, der har vundet virksomhedens
Huawei slutter sig til den smarte højttalerskare med en fremragende routerSmart-højttalere repræsenterer en produktkategori, der ikke forsvinder i den nærmeste fremtid. En combo smart højttaler-internetrouter er i nyhederne. Det er combo-delen, der har vundet virksomhedens -
 For planetens skyld, køleteknik har brug for en opdateringKredit:CC0 Public Domain Køling har været så integreret en del af vores hverdag i så lang tid, at vi sjældent tænker på det. Vores mad er frisk, og vores kontorer og stuer er temperaturkontrollere
For planetens skyld, køleteknik har brug for en opdateringKredit:CC0 Public Domain Køling har været så integreret en del af vores hverdag i så lang tid, at vi sjældent tænker på det. Vores mad er frisk, og vores kontorer og stuer er temperaturkontrollere
- Nyt værktøj hjælper videnskabsmænd med bedre at målrette søgen efter fremmed liv
- SPIDER-missionen vil samle og fremstille en kommunikationsantenne i rummet
- Tre superjorde, der kredser om en sej dværgstjerne opdaget
- Omgå populære adgangskoder
- Fracking efterlader et stort fodaftryk i Argentinas Patagonia
- Fra havkat til romantisk bedrageri, hvordan man undgår at blive fanget i enhver online fidus