


En manta ray-inspireret biosynkret robot med stabil styring via dynamisk elektrisk stimulation
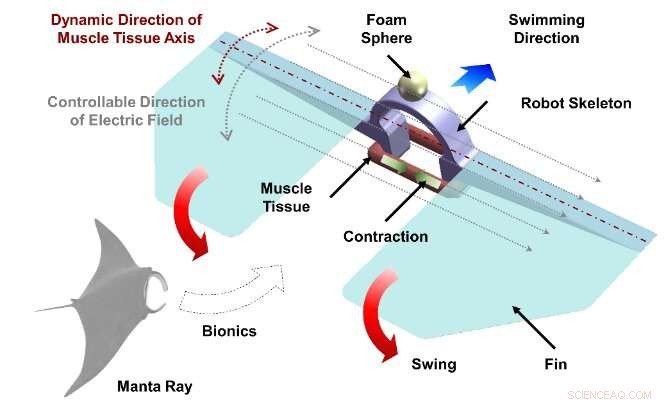
Denne biosynkretiske svømmer var sammensat af en skeletstruktur, to finner, en levende aktuator og en skumbalancemikrokugle. Kredit:Chuang Zhang, Shenyang Institute of Automation, Chinese Academy of Sciences
Naturen har givet stor støtte til udviklingen af robotter. Inspireret af mantastråler har et hold fra State Key Laboratory of Robotics ved Shenyang Institute of Automation, Chinese Academy of Sciences, udviklet en bionisk svømmerobot, der aktiveres af dyrket skeletmuskelvæv og styres af cirkulært distribuerede multiple elektroder (CDME) . Robotten kan effektivt drives frem af kun ét muskelvæv.
Biomimetik er en af de vigtigste robotforskningsmetoder, som kan forbedre robotters kinematiske ydeevne ved at efterligne naturlige organismers struktur og adfærd. Den biosynkretiske robot, der bruger naturlige biologiske materialer som kerneelementet, er videreudviklingen af bionikken.
Nogle levende celler er blevet brugt til at realisere nogle funktioner af robotter, herunder sansning, kontrol og aktivering. Imidlertid er innovative fremdrifts- og kontrolmetoder nødvendige for at videreudvikle biosynkretrobotters kontrollerbare bevægelsesydelse. For at løse dette problem foreslog forskere en dynamisk kontrolmetode baseret på CDME. Forskningen blev publiceret i tidsskriftet Cyborg and Bionic Systems .
Holdet fandt ud af, at det elektriske felt genereret af CDME var mindre skadeligt for dyrkningsmediet og cellerne end konventionelle elektroder. Ved at bruge denne metode kunne retningen af det elektriske felt, der genereres af elektroden, styres dynamisk, holde det parallelt med robottens drivvæv i realtid, og dermed sikre stabil kontrol over robotten.
Først designede holdet robotskelettet baseret på mantastrålens struktur og brugte polydimethylsiloxan (PDMS) som hovedmateriale til strukturen. For at lette samlingen af det drivende væv og robotstrukturen valgte forskerne samtidig det ringformede væv lavet af myoblaster som robottens drivenhed.
For at opnå cirkulært muskelvæv med effektiv kontraktilitet blev der desuden brugt en roterende elektrisk stimulation fra CDME til at realisere ensartet induktion af myoblasterne til at differentiere til myotuber. For at lade robotten svømme med en ønsket hastighed, blev muskelvævets kontraktilitet målt før samling med svømmerstrukturen. Forskerholdet brugte også simuleringsmetoder til at analysere forholdet mellem robottens bevægelsesydelse og den drivende vævskontraktionskraft.
Til sidst, for at demonstrere den stabile og kontrollerbare bevægelse af den foreslåede biosynkretiske robot, indså forskerne den kontrollerbare svømning af robotten ved forskellige hastigheder ved hjælp af den foreslåede dynamiske elektriske stimuleringsmetode. I eksperimentet demonstrerede robotten effektiv svømning og stabil kontrollerbarhed, hvilket bekræftede effektiviteten af det biomimetiske design og den CDME-baserede kontrolmetode foreslået af forskerholdet.
Den biomimetiske design- og aktiveringskontrolmetode, der foreslås i denne undersøgelse, fremmer ikke kun den videre udvikling af biosynkretiske robotter, men har også en vis vejledende betydning for det biomimetiske design af bløde robotter, muskelvævsteknik og andre relaterede områder.
Men selvom de nuværende biosynkretiske robotter har opnået effektiv kontrolleret bevægelse, er der stadig mange vigtige flaskehalse, der skal overvindes. For eksempel er de fleste af robotterne centimeter store, hvilket er vanskeligt til applikationer som lægemiddellevering in vivo.
Teknologier, herunder 3D-print og fleksibel manipulation orienteret til mikro-nano biologiske strukturer, er nøglen til at udvikle biosynkretiske mikrorobotter til kliniske applikationer og andre specielle miljøer. Derudover er de fleste af de eksisterende biosynkretiske robotter afhængige af ydre kunstige stimuli for at opnå kontrolleret bevægelse, som måske mangler autonomi. Derfor kan sansnings- og kontrolmetoden baseret på levende celler anvendes til forskning i biosynkretiske robotter for at realisere autonom robotbevægelse baseret på miljøinformation. + Udforsk yderligere
En bæver-inspireret metode til at guide bevægelserne af en etbenet svømmerobot
Sidste artikelIntegration af elektriske køretøjer i nettet kan forhindre strømafbrydelser
Næste artikelSåd sol med kunstig intelligens
 Varme artikler
Varme artikler
-
 Placering og taleteknologi er fremtidens detailhandelForhandlere har fokuseret deres opmærksomhed på placeringen - men ikke deres placering, din placering. Kredit:Shutterstock Forhandlere, kæmper for at få kontakt med deres kunder, har prøvet nye te
Placering og taleteknologi er fremtidens detailhandelForhandlere har fokuseret deres opmærksomhed på placeringen - men ikke deres placering, din placering. Kredit:Shutterstock Forhandlere, kæmper for at få kontakt med deres kunder, har prøvet nye te -
 Fremskridt inden for førerløse fly kan styre fremtiden for droner, flyvningenEn ny metode fra Purdue University kunne hjælpe med start og landing for autonome taxaer og fragtskibe. Kredit:Purdue University Milliarder af dollars bliver brugt af luftfartsgiganter og rumfarts
Fremskridt inden for førerløse fly kan styre fremtiden for droner, flyvningenEn ny metode fra Purdue University kunne hjælpe med start og landing for autonome taxaer og fragtskibe. Kredit:Purdue University Milliarder af dollars bliver brugt af luftfartsgiganter og rumfarts -
 Skuffende vækst rammer Googles overordnede alfabetaktierGoogle forælder Alphabet leverede en svagere omsætning end forventet i fjerde kvartal Google forælder Alphabet rapporterede mandag stigende overskud i de sidste tre måneder af sidste år midt i væk
Skuffende vækst rammer Googles overordnede alfabetaktierGoogle forælder Alphabet leverede en svagere omsætning end forventet i fjerde kvartal Google forælder Alphabet rapporterede mandag stigende overskud i de sidste tre måneder af sidste år midt i væk -
 Kina er på vej til at opfylde sine ultralave emissionsmål for 2020, undersøgelse finderUltra-lave emissionskontroludstyr i Kina Kredit:Ling Tang, Beijing University of Chemical Technology og Beihang University; Jiabao Qu, Ministeriet for Miljøbeskyttelse og HeBei University of Science a
Kina er på vej til at opfylde sine ultralave emissionsmål for 2020, undersøgelse finderUltra-lave emissionskontroludstyr i Kina Kredit:Ling Tang, Beijing University of Chemical Technology og Beihang University; Jiabao Qu, Ministeriet for Miljøbeskyttelse og HeBei University of Science a
- Kan der være en form for liv inde i stjerner?
- Mere stress, færre mestringsressourcer for Latina-mødre i et skiftende politisk klima
- Apple Watch er ved at blive en medicinsk enhed
- Undersøgelse viser potentiale for at genoplive forladt kræftmedicin ved levering af nanopartikler
- NASAs Dragonfly Rotorcraft for at udforske Saturns Giant Moon Titan
- Metalliske drivere til Alzheimers sygdom