


En lillebitte, magnetisk aktiveret gearkasse, der giver mikrorobotter mere kraft
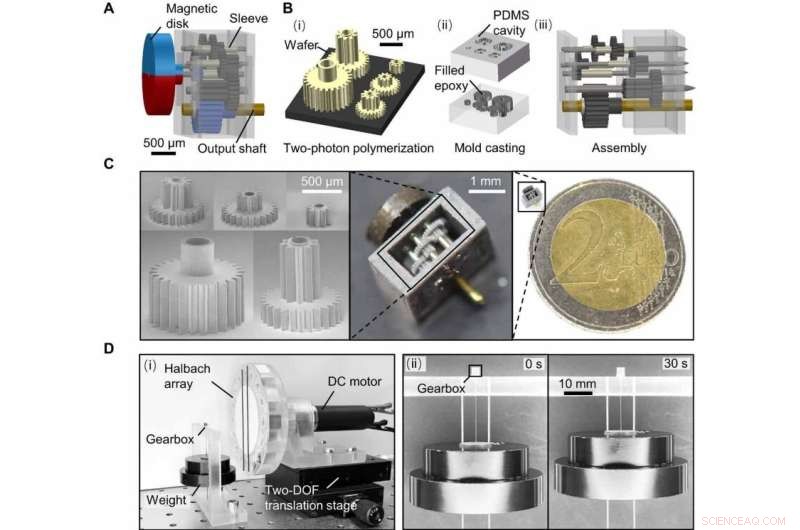
Design og ydeevne af den magnetisk aktiverede miniature gearkasse til millimeterskala magnetiske aktuatorer. Kredit:Science Robotics (2022). DOI:10.1126/scirobotics.abo4401
Et team af forskere ved Max Planck Institute for Intelligent Systems, der arbejder sammen med et par kolleger fra Harbin Institute of Technology, har udviklet en lillebitte aktiveret gearkasse, der kan bruges til at give meget små robotter mere kraft. I deres papir offentliggjort i tidsskriftet Science Robotics, gruppen beskriver, hvordan deres gearkasse fungerer, og de effektforbedringer, der observeres i flere typer små robotter.
I løbet af de sidste mange år har forskere arbejdet på udviklingen af bittesmå robotter, der kan sprøjtes ind i den menneskelige krop for at udføre medicinske procedurer. Håbet er, at sådanne robotter kan sendes til for eksempel at finde og ødelægge kræftsvulster. Sådanne små robotter er for små til at bære deres eget kraftværk; derfor skal de manipuleres ved hjælp af et eksternt magnetfelt. Desværre, efterhånden som robotterne bliver stadig mindre, bliver deres kraft mindre, da de har for lidt masse. I denne nye indsats har forskerne fundet en måde at øge kraften i de små robotter ved hjælp af en lille gearkasse, der hjælper dem med at blive stærkere.
Gearkassen kommer med en magnet på sin ende for at udnytte kraften i et magnetfelt via gearene i kassen. Og gearkassen er i stand til at forstørre en robots kraft ved hjælp af smarte funktioner, herunder elastiske komponenter og mekaniske koblinger.
For at bruge gearkassen skal de bittesmå robotter være bygget på en måde, så de kan udnytte dem. For eksempel, ved at kombinere elastiske komponenter med mekaniske koblinger, kan fjederlignende energi opbygge tryk og derefter frigive det hele på én gang. De mekaniske koblinger tjener til at holde de elastiske komponenter på plads, indtil det er tid til at frigive energien.
For at teste deres idé byggede forskerne kasselignende strukturer med elastiske vægdele, der langsomt blev komprimeret af gearkassen, når den blev udsat for et magnetfelt. En mekanisk forbindelse holdt væggene på plads for at tillade trykket at bygge. Når en vis mængde tryk var nået, blev væggene frigivet og skubbede robotten i en ønsket retning. For at skabe en robot blev flere af de kasselignende strukturer hægtet sammen. Ved at bruge denne tilgang var forskerne i stand til at skabe robotter af spiltypen, der kunne løfte op til 103 gram, eller jumpere, der nåede 119 millimeter. De skabte også crawlere og klemmere. + Udforsk yderligere
Se små elektromekaniske robotter, der er hurtigere end geparder for deres størrelse
© 2022 Science X Network
 Varme artikler
Varme artikler
-
 Spildesignere har et nyt værktøj til at evaluere spilleroplevelsenKredit:CC0 Public Domain Et gratis værktøj, der vil gøre det muligt for spiludviklere at evaluere oplevelsen af videospilspillere nøjagtigt, er blevet lanceret af forskere ved University of Wate
Spildesignere har et nyt værktøj til at evaluere spilleroplevelsenKredit:CC0 Public Domain Et gratis værktøj, der vil gøre det muligt for spiludviklere at evaluere oplevelsen af videospilspillere nøjagtigt, er blevet lanceret af forskere ved University of Wate -
 Check Point Research viser sårbarheder i DSLR-kameraerEn sikkerhedsforsker udnyttede sårbarheder i en protokol, der blev brugt i digitale kameraer, til at inficere ransomware i et DSLR-kamera via en falsk WiFi-forbindelse. Ionut Ilascu ind Bleeping Com
Check Point Research viser sårbarheder i DSLR-kameraerEn sikkerhedsforsker udnyttede sårbarheder i en protokol, der blev brugt i digitale kameraer, til at inficere ransomware i et DSLR-kamera via en falsk WiFi-forbindelse. Ionut Ilascu ind Bleeping Com -
 Google er klar til at afsløre nye Pixel-telefoner, andre tjenesterI denne tirsdag, 8. maj, 2018 filbillede, Googles CEO Sundar Pichai taler ved Google I/O-konferencen i Mountain View, Calif. Google forventes at introducere to nye smartphones i sit ubønhørlige skub f
Google er klar til at afsløre nye Pixel-telefoner, andre tjenesterI denne tirsdag, 8. maj, 2018 filbillede, Googles CEO Sundar Pichai taler ved Google I/O-konferencen i Mountain View, Calif. Google forventes at introducere to nye smartphones i sit ubønhørlige skub f -
 Nu, du kan 3-D printe ler, småkagedej – eller fast raketbrændstofEn ny 3-D printteknik gør det muligt at bruge materialer med konsistensen af ler eller kagedej til at fremstille en række forskellige former. Purdue University assistentprofessor Emre Gunduz brugte
Nu, du kan 3-D printe ler, småkagedej – eller fast raketbrændstofEn ny 3-D printteknik gør det muligt at bruge materialer med konsistensen af ler eller kagedej til at fremstille en række forskellige former. Purdue University assistentprofessor Emre Gunduz brugte
- Efterhånden som Digital Earth tager fart, Kina sætter tempoet
- Cypern fremviser en gammel undersøisk havn for at tiltrække turister
- Efterårshedebølge bringer Californien mere brandfare
- Sådan beregnes energi frigivet & Absorbed
- Forskere får et atomistisk billede af platinkatalysatornedbrydning
- PCA sygepleje matematiske problemer