


Hvordan videnskabsmænd designede controllere til robotmanipulatorer på den kinesiske rumstation
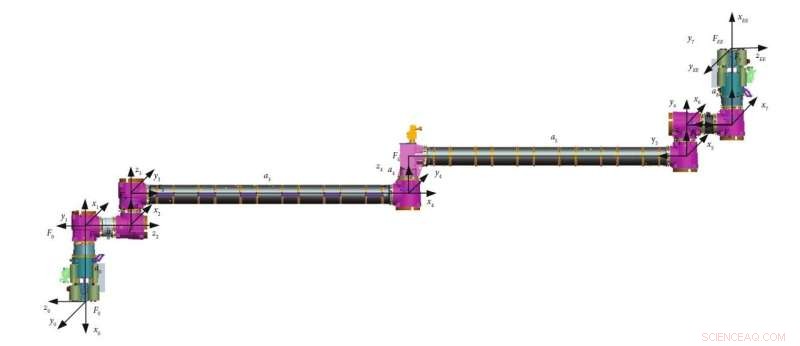
I forskningen præsenteres simuleringsresultaterne af vores rekursive sammensatte adaptive kontrolalgoritme i sammenligning med den direkte adaptive kontrolalgoritme. Koordinatrammerne for manipulatoren på den kinesiske rumstation er plottet her. Kredit:Rum:Videnskab og teknologi
I processen med konstruktionen og rutinevedligeholdelsen af den kinesiske rumstation spiller manipulatoren en væsentlig vigtig rolle, som kan udføre nogle nøgleopgaver, såsom transponeringsdocking, daglig vedligeholdelse og hjælpeaktiviteter uden for køretøjet. Den høje nøjagtighed og dynamiske ydeevne af manipulatoren er nødvendig for en vellykket gennemførelse af disse opgaver, som ofte kan opretholdes af kontroller, der er designet baseret på dynamikmodellen.
Men i praksissituationerne er det normalt urealistisk at få alle inertiparametrene præcist. Derfor er den adaptive kontrol udviklet til at sikre konvergens af sporingskontrol, selvom systemet har usikre eller langsomt skiftende parametre. I en forskningsartikel for nylig offentliggjort i Space:Science &Technology , Dr. Li fra State Key Laboratory of Management and Control for Complex Systems, foreslog en ny rekursiv implementering af sammensat adaptiv kontrol til robotmanipulatorer.
Først genbesøgte Dr. Li den sammensatte adaptive controller foreslået af Slotine og Li. Adaptiv kontrol kan sikre konvergens af sporingskontrol, selvom systemet har usikre eller langsomt skiftende parametre. Generelt kan denne ordning opdeles i to klasser kaldet den direkte tilpasning og den indirekte tilpasning i henhold til det signal, der driver parameteropdateringsloven.
I den første kategori er parameteropdateringen drevet af sporingsfejlene, mens parametrene i den anden kategori ændres i henhold til forudsigelsesfejlene, normalt af de filtrerede ledmomenter. Adaptiv kontrol baseret på sporingsfejl kan normalt garantere en global sporingskonvergens; dog har konvergeringen af estimerede parametre strengere betingelser. Til sammenligning har den indirekte adaptive kontrol en hurtigere parameterkonvergenshastighed, men det er generelt vanskeligt at opnå stabiliteten af sporingsfejlene.
Ved at kombinere de to metoder har den velkendte sammensatte adaptive controller fordelene ved begge, hvor parametertilpasningen er drevet af både sporingsfejl og forudsigelsesfejl. Imidlertid er beregningsmæssig kompleksitet af disse adaptive kontrolmetoder en hovedbegrænsning i de praktiske robotmanipulatorer, især for tilfælde med høj grad af frihed. Indtil nu har kun få værker været opmærksomme på den rekursive udførelse af den indirekte adaptive eller den sammensatte adaptive controller, sandsynligvis fordi brugen af forudsigelsesfejlen udtrykt af regressionsmatricen gør det meget vanskeligt at reducere rækkefølgen af den beregningsmæssige kompleksitet.
For at løse de førnævnte vanskeligheder omskrev Dr. Li Newton-Euler-formuleringen ved at bruge formen af generelle matricer fra den klassiske Rekursive Newton-Euler-algoritme. Derefter designes den rekursive sammensatte adaptive kontrolmetode, og stabiliteten af den foreslåede metode verificeres ved at vælge en passende Lyapunov-funktion. Den beregningsmæssige kompleksitet af den foreslåede rekursive sammensatte tilpasning er meget mindre end i de eksisterende undersøgelser. Årsagen er, at der i den originale sammensatte controller ikke er blevet taget hensyn til dens beregningsmæssige aspekter. Da beregningsbelastningen af de foreslåede controllere er på samme skala som de rekursive direkte adaptive controllere, udføres en sammenligning mellem disse to metoder.
Resultater viser, at sporingsfejlene tydeligvis reduceres ved at bruge den rekursive sammensatte adaptive controller, og parameterestimaterne konvergerer hurtigere med den rekursive sammensatte adaptive controller. I simuleringsdelen bruges den kinesiske rumstations manipulator som et simuleringseksempel, og resultaterne bekræfter effektiviteten af den foreslåede rekursive algoritme. Da beregningsbelastningen er lineær med antallet af leddene, er den foreslåede metode desuden attraktiv især for den redundante flerledsmanipulator.
 Varme artikler
Varme artikler
-
 En anden skærmgodbit ankommer til AndroidDuet Display er blevet bragt til Android. Duet er firmaet bag appen Duet Display, hvilket har tiltrukket fans for den måde, det giver en anden skærm. Duet er en app – udviklet af et team af tidligere
En anden skærmgodbit ankommer til AndroidDuet Display er blevet bragt til Android. Duet er firmaet bag appen Duet Display, hvilket har tiltrukket fans for den måde, det giver en anden skærm. Duet er en app – udviklet af et team af tidligere -
 Nyt kontinuum robotdesign opnår bevægelsesopløsninger på 1 mikron eller mindreForøgelse af en eksisterende makroskala, multi-backbones robot med mikron-skala bevægelsesevner opnås ved at tilføje ledninger (røde) inde i strukturen, der kan glide ind og ud af de rørformede backbo
Nyt kontinuum robotdesign opnår bevægelsesopløsninger på 1 mikron eller mindreForøgelse af en eksisterende makroskala, multi-backbones robot med mikron-skala bevægelsesevner opnås ved at tilføje ledninger (røde) inde i strukturen, der kan glide ind og ud af de rørformede backbo -
 Ny sikrere, billig måde at drive små satellitter påForskere fra Purdue University har skabt et nyt mikropropulsionssystem til nanosatellitapplikationer ved hjælp af en væskefødet pulseret plasma-thruster. Kredit:Purdue University/Alexey Shashurin
Ny sikrere, billig måde at drive små satellitter påForskere fra Purdue University har skabt et nyt mikropropulsionssystem til nanosatellitapplikationer ved hjælp af en væskefødet pulseret plasma-thruster. Kredit:Purdue University/Alexey Shashurin -
 På trods af god fremgang, 100% lavemissionsenergi er stadig langt væk for StorbritannienBlot en lille del af Storbritanniens energifremtid. Kredit:majeczka/Shutterstock I de sidste ti år har Storbritanniens elmix ændret sig dramatisk. Kuls bidrag er faldet fra 40 procent til 6 procen
På trods af god fremgang, 100% lavemissionsenergi er stadig langt væk for StorbritannienBlot en lille del af Storbritanniens energifremtid. Kredit:majeczka/Shutterstock I de sidste ti år har Storbritanniens elmix ændret sig dramatisk. Kuls bidrag er faldet fra 40 procent til 6 procen
- Astronomer registrerer gammastråler, der er en gang i livet
- Klimaforandringer og omsorgssvigt truer senegalerne Saint Louis
- Forskere designer effektivt billigt system til at producere strøm om natten
- Ikke giftig, højkvalitets overfladebehandling til organiske felteffekttransistorer
- Indsigt i reaktionsmekanismen for lithium-ilt-batterier kan føre til bedre batterier
- Hvordan virusser ændrer måden vi ser på Evolution