


Nyt kontinuum robotdesign opnår bevægelsesopløsninger på 1 mikron eller mindre
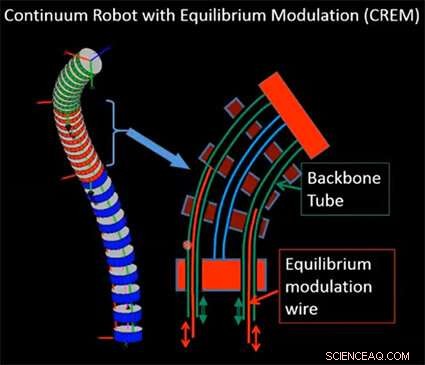
Forøgelse af en eksisterende makroskala, multi-backbones robot med mikron-skala bevægelsesevner opnås ved at tilføje ledninger (røde) inde i strukturen, der kan glide ind og ud af de rørformede backbones. Dette muliggør modulering af ligevægtsformen. Robotten opnår stadig storstilet (makro) bevægelse ved hjælp af de rørformede sekundære rygrader stift fastgjort til den øverste røde skive. Ved direkte aktivering, skubbe og trække i dem, kontinuum-robotkonfigurationen ændres. Kredit:Vanderbilt University
En ny kontinuumsrobot designet af Vanderbilts ingeniører opnår multi-skala bevægelse og kan åbne op for en enorm verden af hidtil umulige komplekse mikrokirurgier.
Robotten er i stand til at levere både et stort arbejdsområde med makrobevægelser efter behov for kirurgisk indgreb og et lille arbejdsområde med mikrobevægelser med bevægelsesopløsninger på 1 mikron eller mindre. For en følelse af skala, en tomme indeholder 25, 400 mikron. Et menneskeligt rødt blodlegeme er omkring otte mikrometer bredt, samme størrelse som nogle bakterier og væsentligt mindre end bredden af det gennemsnitlige menneskehår.
"Vores design opnår bevægelsesopløsninger på 1 mikron eller mindre ved at bruge billige aktuatorer. Denne rekonfiguration - med minimale ekstra omkostninger - kunne accelerere udviklingen af en ny klasse af kirurgiske robotter, der er i stand til både makrobevægelse til kirurgisk indgreb og mikroskalabevægelse for billeddannelse eller intervention på celleniveau, " sagde Nabil Simaan, professor i maskinteknik og direktør for Advanced Robotics and Mechanism Applications Laboratory.
"Dette udvider i høj grad robotteknologiens muligheder inden for minimalt invasiv kirurgi, " han sagde.
Miniaturiseringen og bevægelsesområdet ville tillade præcis kontrol under procedurer på komplekse aneurismer, små vener og arterier, nerver og de sarte strukturer i øjet, det indre øre og stemmebåndene. Potentielle anvendelser omfatter biopsier, tumorudryddelse og målrettet lægemiddellevering på celleniveau.
Simaan og hans team har tilpasset den fleksible arkitektur af hans tidligere kontinuumsrobot til at udføre på makro- og mikroskala ved at ændre robottens ligevægtsposition, som Simaan kalder kontinuumsrobotter med ligevægtsmodulation, eller CREM.
Den fleksible arkitektur af tidligere kontinuum-robotter opnåede en ormelignende bevægelse til makromanipulation. Robotten er segmenteret med skiver eller ringe som kroppen af en regnorm. Hver disk er forbundet med små rygrader, eller aktiveringsrør. Ved at tilføje små elastiske ledninger inde i aktiveringsrørene og flytte ledninger op eller ned, den statiske ligevægt af pladerne ændres, skabe bevægelse på mikrometerskalaen.
"Denne nye klasse af robotter vil give mikropræcision, mens de krydser makroskala bugtende veje til operationsstedet. Potentielle fordele omfatter nøjagtig vævsrekonstruktion og fuldstændig kirurgisk udryddelse af tumorer, " sagde Simaan, en tilknyttet Vanderbilt Institute for Surgery and Engineering.
Robotten bruger rørformede sekundære rygrader til at opnå den store bevægelsesskala. Ved at skubbe og trække i dem, kontinuum-robotkonfigurationen ændres. Tilføjelsen af ledninger, der kan glide ind og ud af de rørformede rygrad, gjorde det muligt for forskerholdet at modulere ligevægtsformen.
Derudover omfattende test er i gang for inkorporering af optisk kohærenstomografi, som effektivt er "optisk ultralyd", der tillader billedrefleksioner inde fra væv.
Simaan og hans kolleger, maskiningeniørstuderende Giuseppe Del Giudice, Forskningsadjunkt i oftalmologi og visuel videnskab Jin-Hui Shen og læge Karen M. Joos, Joseph N. og Barbara H. Ellis familieprofessor i oftalmologi, har gennemført en foreløbig integration af en specialfremstillet OCT-sonde.
Joos' særlige forskningsinteresse er brugen af miniature OCT-sonder med robotkirurgiske værktøjer til at forbedre visualiseringen af procedurer inde i øjet. Del Giudices ekspertise er inden for design og kontrol af mikro-kontinuum medicinske robotter, specifikt mikromanipulation til oftalmisk kirurgi.
Udvidelse af mulighederne for en standard kontinuum robot med hensyn til mikroskala bevægelse og målretning kan have en dyb indvirkning i mikrokirurgi ved at give betydeligt øget fingerfærdighed, kontrollerbarhed og præcision for kirurger eller endda banebrydende inden for tidligere umulige procedurer, sagde Simaan.
 Varme artikler
Varme artikler
-
 Ny applikation kan registrere Twitter-bots på ethvert sprogKredit:CC0 Public Domain Takket være et frugtbart samarbejde mellem sprogforskere og maskinlæringsspecialister, en ny applikation udviklet af forskere ved University of Eastern Finland og Linnaeus
Ny applikation kan registrere Twitter-bots på ethvert sprogKredit:CC0 Public Domain Takket være et frugtbart samarbejde mellem sprogforskere og maskinlæringsspecialister, en ny applikation udviklet af forskere ved University of Eastern Finland og Linnaeus -
 Energiministeriet ønsker at bygge en hurtig atomprøvereaktorKredit:CC0 Public Domain En ny atomprøvereaktor er nødvendig som en del af en indsats for at forny landets falmende atomkraftindustri ved at udvikle sikrere brændstof og kraftværker, Det oplyser d
Energiministeriet ønsker at bygge en hurtig atomprøvereaktorKredit:CC0 Public Domain En ny atomprøvereaktor er nødvendig som en del af en indsats for at forny landets falmende atomkraftindustri ved at udvikle sikrere brændstof og kraftværker, Det oplyser d -
 Højeste EU -domstol til at træffe afgørelse om Googles ret til at blive glemt sagEUs øverste domstol skal afgøre, om Google skal anvende dommen om ret til at blive glemt på alle sine søgewebsteder verden over - eller bare til Europa Europas højesteret vil tirsdag afgøre, om de
Højeste EU -domstol til at træffe afgørelse om Googles ret til at blive glemt sagEUs øverste domstol skal afgøre, om Google skal anvende dommen om ret til at blive glemt på alle sine søgewebsteder verden over - eller bare til Europa Europas højesteret vil tirsdag afgøre, om de -
 Irans netstop først for effektivt at isolere en hel nationI denne 20. november, 2019, fil foto, en tankstation, der blev angrebet under protester over stigninger i regeringens fastsatte benzinpriser, afspejles i en vandpyt, i Teheran, Iran. Internetforbindel
Irans netstop først for effektivt at isolere en hel nationI denne 20. november, 2019, fil foto, en tankstation, der blev angrebet under protester over stigninger i regeringens fastsatte benzinpriser, afspejles i en vandpyt, i Teheran, Iran. Internetforbindel
- Landformer i ferskvandsområder
- Facebooks Vægt:Det er ikke kryptoen, der er problemet, det er organisationen bag
- Den voldsramte Jord genoplivet af mineralforvitring efter masseudryddelse
- Organisationer med brede sociale bånd hjælper med at komme sig efter naturkatastrofer
- NASA-satellitter kigger ind i en lop-sidet orkan Maria
- NASA CubeSats styrer mod Mars