


Forskere styrer bløde robotter ved hjælp af magnetfelter
Kredit:North Carolina State University
Et team af ingeniørforskere har gjort et grundlæggende fremskridt med at kontrollere såkaldte bløde robotter, ved hjælp af magnetfelter til fjernbetjening af mikropartikelkæder indlejret i bløde robotindretninger. Forskerne har allerede skabt flere enheder, der gør brug af den nye teknik.
"Ved at sætte disse selvsamlende kæder i bløde robotter, vi er i stand til at få dem til at udføre mere komplekse funktioner, mens vi stadig bevarer relativt enkle designs, "siger Joe Tracy, en lektor i materialevidenskab og teknik ved North Carolina State University og tilsvarende forfatter til et papir om værket. "Mulige applikationer for disse enheder spænder fra fjernbetjente pumper til levering af lægemidler til udvikling af fjernbetjeningsbare strukturer."
Den nye teknik bygger på tidligere arbejde inden for selvsamling, magnetisk aktiverede kompositter af Tracy og Orlin Velev, INVISTA -professoren i kemisk og biomolekylær teknik ved NC State.
Til denne undersøgelse, forskerne introducerede jernmikropartikler i en flydende polymerblanding og påførte derefter et magnetfelt for at få mikropartiklerne til at danne parallelle kæder. Blandingen blev derefter tørret, efterlader en elastisk polymer tynd film indlejret i de justerede kæder af magnetiske partikler.
"Kæderne tillader os at manipulere polymeren eksternt som en blød robot ved at styre et magnetfelt, der påvirker kæderne af magnetiske partikler, "Siger Tracy.
Specifikt, magnetfeltets retning og dets styrke kan varieres. Kæderne af jernmikropartikler reagerer ved at justere sig selv og den omgivende polymer i samme retning som det påførte magnetfelt.
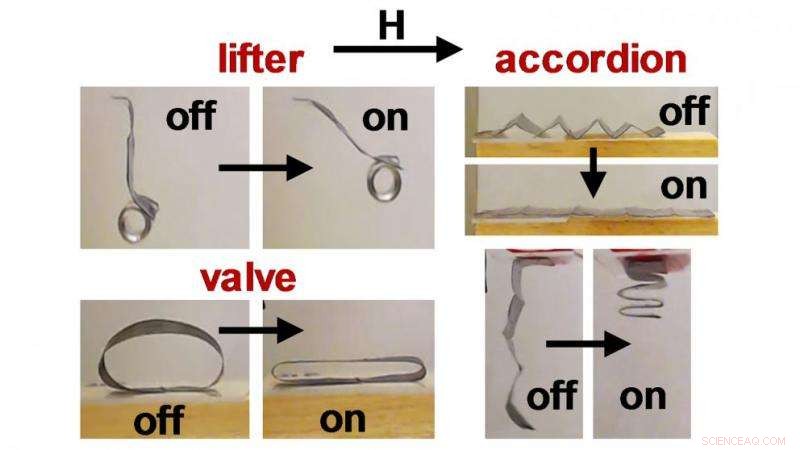
Ved hjælp af denne teknik, forskerne har skabt tre slags bløde robotter. Den ene enhed er en udligger, der kan løfte op til 50 gange sin egen vægt. Den anden enhed er en harmonika-lignende struktur, der udvider sig og trækker sig sammen, efterligner musklernes adfærd. Den tredje enhed er et rør, der er designet til at fungere som en peristaltisk pumpe - en komprimeret sektion bevæger sig ned langs rørets længde, meget som nogen, der presser den sidste bid tandpasta ud ved at køre fingeren langs røret.
"Vi arbejder nu på at forbedre både kontrol og styrken på disse enheder, at fremme potentialet i blød robotik, "Siger Tracy.
Forskerne har også udviklet en metrik til vurdering af ydelsen af magnetiske løftere, f.eks. cantilever -enheden.
"Vi gør dette ved at måle mængden af vægt, der løftes og tage hensyn til både massen af partikler i løfteren og styrken af det anvendte magnetfelt, "siger Ben Evans, medforfatter af papiret og lektor i fysik ved Elon University. "Vi synes, at dette er et nyttigt værktøj for forskere på dette område, der ønsker at finde en empirisk måde at sammenligne forskellige enheders ydeevne."
 Varme artikler
Varme artikler
-
 Fangernes dilemma:Udforskning af en strategi, der fører til gensidigt samarbejde uden ikke-samarbej…Fasediagrammer over strategidistributioner i skiftevis PDG. Kredit:Hitoshi Yamamoto Et forskerhold ledet af Hitoshi Yamamoto fra Rissho University har analyseret, hvilke strategier der ville være
Fangernes dilemma:Udforskning af en strategi, der fører til gensidigt samarbejde uden ikke-samarbej…Fasediagrammer over strategidistributioner i skiftevis PDG. Kredit:Hitoshi Yamamoto Et forskerhold ledet af Hitoshi Yamamoto fra Rissho University har analyseret, hvilke strategier der ville være -
 Kapillær strøm udnyttes for første gangKapillær flow er et almindeligt fænomen, der er forbundet med daglige opgaver, fra tørring af spild til vanding af planter. Kredit:KTH Royal Institute of Technology Du har måske aldrig hørt om kap
Kapillær strøm udnyttes for første gangKapillær flow er et almindeligt fænomen, der er forbundet med daglige opgaver, fra tørring af spild til vanding af planter. Kredit:KTH Royal Institute of Technology Du har måske aldrig hørt om kap -
 Fotoniske krystaller:selv tynd er funktionelFigur 1. Repræsentation af træbunkens fotoniske krystalstruktur, der har en lignende struktur som en diamantkrystal forstørret 1000 gange. Kredit:University of Twente Fotoniske krystaller er de na
Fotoniske krystaller:selv tynd er funktionelFigur 1. Repræsentation af træbunkens fotoniske krystalstruktur, der har en lignende struktur som en diamantkrystal forstørret 1000 gange. Kredit:University of Twente Fotoniske krystaller er de na -
 Biofotoniske prober til biodetektion og billeddannelseForskellige biologiske enheder, såsom virus, alger & bakterie, pattedyrsceller, og væv, kan bruges til dannelse af biofotoniske prober, såsom biologiske lasere, biofotoniske bølgeledere, og bio-mi
Biofotoniske prober til biodetektion og billeddannelseForskellige biologiske enheder, såsom virus, alger & bakterie, pattedyrsceller, og væv, kan bruges til dannelse af biofotoniske prober, såsom biologiske lasere, biofotoniske bølgeledere, og bio-mi
- Dyreopførsel Videnskabsmesse Projektideer
- De forskellige typer af landformer
- Science fiction bliver videnskabsfaktum, da forskere skaber flydende metalhjerteslag
- Bedømmer vi chokolade efter dens indpakning?
- NASAs GPM undersøger udviklingen af amerikansk hårdt vejr
- Sprint lancerer mobilt 5G-netværk i Atlanta, Dallas-Fort Worth, Houston og Kansas City