


Formprogrammerbare dielektriske flydende krystalelastomeraktuatorer
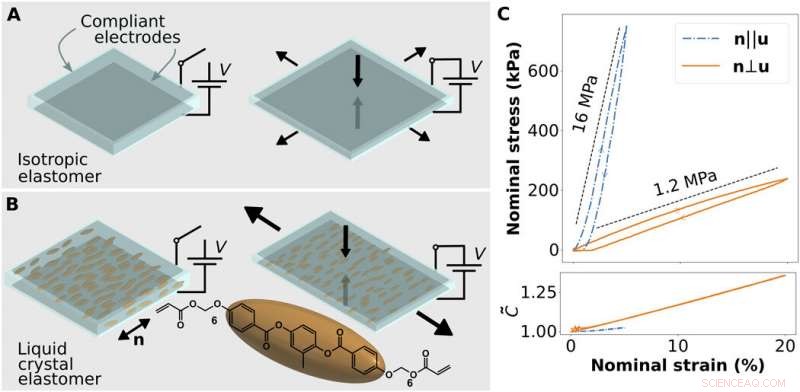
Skematisk enhed, mekanisk, og elektrisk karakterisering. (A) Skematisk af en traditionel isotrop DE -aktuator i off og on -tilstande. (B) skematisk af en enaksial justeret dielektrisk LCE -aktuator (DLCEA) i slukket og tændt tilstand. Flydende krystal molekylær justering; direktøren, n, er angivet med en dobbelthovedet pil og definerer den stivere retning af LCE. Når den aktiveres af en spænding, V, materialet tyndes og strækker sig vinkelret på justeringen større end parallelt med direktøren. (C) DLCEA mekanisk spænding og normaliseret kapacitans (C∼) reaktion på belastning over DLCEA lineære regime er karakteriseret ved en belastningshastighed på 0,1% pr. Sekund. Kredit:Science Advances, doi:10.1126/sciadv.aay0855
Materialeforskere sigter mod at bruge bioinspirerede bløde robotter til at udføre avancerede interaktioner mellem mennesker og robotter, men den tilhørende teknologi mangler at blive udviklet. For eksempel, bløde aktuatorer skal udføre hurtigt med kraft for at levere programmerbare formændringer, og enhederne skal være lette at fremstille og energieffektive til uforbundne applikationer. I en ny rapport om Videnskab fremskridt , Zoey S. Davidson og et tværfagligt forskerhold i afdelingerne for fysisk intelligens, Materialevidenskab og teknik, og School of Medicine i Tyskland, USA og Tyrkiet, kombinerede flere interessekarakteristika ved hjælp af to forskellige aktive materialesystemer til at bygge bløde robotter.
Forskerne integrerede hurtig og meget effektiv aktivering med dielektriske elastomerer (DE) og styret formprogrammerbarhed ved hjælp af flydende krystalelastomerer (LCE). Ved hjælp af top -down fotojusteringsteknikker, de programmerede derefter molekylær justering og lokaliserede kæmpe elastisk anisotropi i flydende krystalelastomerer. Forskerne udviklede lineære aktiverede monolitter af flydende krystalelastomer med belastningshastigheder over 120 procent, pr. sekund, og en energiomsætningseffektivitet på 20 procent, når belastninger flyttes over 700 gange elastomerens vægt. Mekanismen vil tillade nye forskningsmuligheder i miniaturiseret formprogrammerbarhed og effektivitet sammen med øgede frihedsgrader for applikationer inden for blød robotik i tværfaglig forskning.
Materialrobotikforskere betragter kompatible aktuatorer som den manglende nøgle til at danne effektive menneskelige og robotinterfaces. Kompatible bløde aktuatorer vil ideelt set være yderst effektive, opretholde forholdet mellem styrke og vægt, arbejdskapacitet og form programmerbarhed til at fuldføre komplekse funktioner. Bløde aktuatorer med sådanne egenskaber vil fungere meget som en kunstig muskel med avancerede applikationer inden for luftfart, robotik, hospitalsudstyr, energiindsamlingsudstyr og i wearables. Blandt de forskellige bløde aktuatorer, der blev undersøgt, dielektriske elastomerer (DE'er) er de mest lovende. Parallelt, flydende krystalelastomerer (LCE'er) kan undergå reversibel mekanisk deformation ved hjælp af lys og termisk aktivering nær faseovergangstemperatur. Fremskridt inden for fotojustering og mikrofabrikation har gjort det muligt for forskere at forprogrammere flydende krystaljustering i mikroskopiske områder til kompleks formformning. Imidlertid, eksisterende mekanismer kræver fremstillingsmetoder i flere trin, mens indsatsen for at overføre elektrisk energi til mekanisk arbejde ved hjælp af LCE er begrænset på grund af den lille belastning, de genererer.
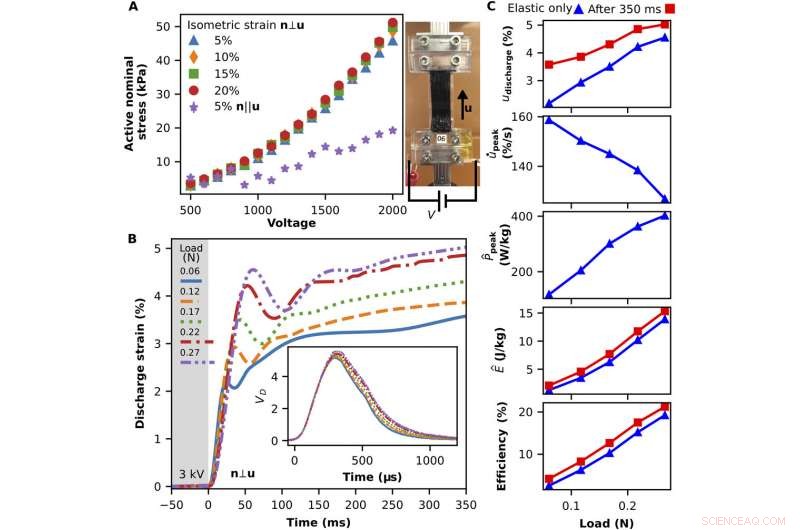
Karakterisering af uniaxial DLCEA demonstrerer mulighederne for en DLCEA -aktuator. (A) isometriske (konstant stamme) test. Målt aktiv nominel spændingsreduktion med forskellige indledende isometriske stammer (u) til enheder, der er samlet med LCE -direktøren n⊥u og n‖u og et fotografi af en samlet DLCEA -enhed med n⊥u. (B) isotoniske (konstant kraft) test. Kontraktile udladningsbelastningsbaner under forskellige belastninger målt af et højhastighedskamera med aktiveringsspændinger på 3 kV. Indsats:De tilsvarende målinger af elektrisk afladning. (C) Grundlæggende aktuatoregenskaber beregnes ud fra sammentrækningsbanen og måling af afladningsstrømmen fundet i (B), herunder stamme (u), maksimal belastningshastighed (u˙peak), spids specifik effekt (Pˆpeak), specifik energi (Eˆ), og effektivitet. Fotokreditter:Zoey S. Davidson. Kredit:Science Advances, doi:10.1126/sciadv.aay0855
I det nuværende arbejde, Davidson et al. mønstret LCE (flydende krystalelastomerer) til at skræddersy rumlig variation af mekanisk overensstemmelse (overføre en inputkraft og forskydning gennem elastisk kropsdeformation) og udvikle mere effektive dielektriske elastomeraktuatorer med forprogrammerbarhed og aktiveringsretning (kompression). Generelt, DE (dielektrisk elastomer) aktuatorer fungerer ved hjælp af elektrostatisk tiltrækning mellem to kompatible elektroder skabt på modsatte sider af en isotrop DE for at konstruere en variabel modstand-kondensator. Høj spænding påført de kompatible elektroder kan forårsage et elektrostatisk tryk kendt som Maxwell stress for at deformere DE; til elektrisk aktivering. Denne mekanisme kan producere en højere driftseffektivitet og højere aktiveringshastighed end LCE'ernes. Imidlertid, trods nogle imponerende resultater, DE-aktuatorer har endnu ikke opnået udbredt anvendelse inden for blød robotik på grund af eksisterende udfordringer, der kan overvindes ved hjælp af innovative materialer til konstruktion af næste generation, højtydende DE'er med formprogrammerbarhed.
Davidson et al. direkte undersøgt den store mekaniske anisotropi (for at øge belastningens lokalisering) af LCE -materialer ved hjælp af elektrisk aktivering, uden at stole på molekylær rotation. De omfattede nylige fremskridt inden for materialevidenskab til konstruktion af yderst effektive og formprogrammerbare DE'er; betegnes som dielektriske LCE -aktuatorer (DLCEA). Forskerne justerede LCE-molekyler i lokale domæner for at opnå elektrisk drevet aktivering og tillade formformning ved stuetemperatur for at demonstrere store, hurtige og kraftige belastninger.
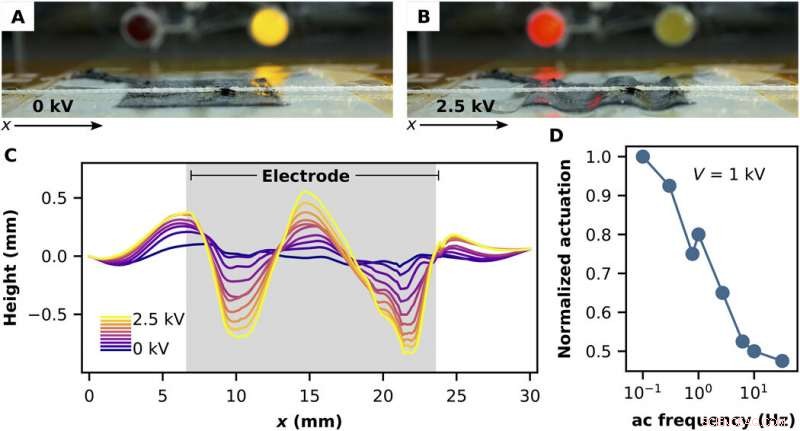
Enaxial DLCEA uden for flyet. (A) Off og (B) på tilstande for en uniaxial DLCEA -enhed med fast grænsetilstand. Udvidelse langs den bløde retning skaber knæk uden for flyet, som fortrænger en fin tråd, der holdes stramt over overfladen. (C) Eksperimentel måling af knæk som en funktion af den påførte spænding. (D) Frekvensrespons af knækende enaksial DLCEA ved 1 kV. 0,1-Hz aktiveringsamplituden er cirka 130 μm. Fotokreditter:Zoey S. Davidson. Kredit:Science Advances, doi:10.1126/sciadv.aay0855
Forskerteamet udviklede LCE-filmene i en totrinsproces; først, de udviklede kortvarigt en oligomer, efterfulgt af LCE-filmfremstilling under anvendelse af en thiol-acrylat-klikreaktion. De indstillede det nøjagtige forhold mellem komponenter, valget af monomer og dithiol -linker, for at justere de ønskede mekaniske egenskaber for den sidste LCE -film. Arbejdet frembragte store områder med velordnet ensartet LCE med stor elastisk anisotropi. Forskerne påførte kompatible fedtelektroder på begge sider af LCE -filmen for at skabe DLCEA (dielektrisk LCE -aktuator) -enheder.
Davidson et al. derefter karakteriseret (testet) materialerne, der starter med monodomain uniaksialt justerede LCE -film. Næste, de testede de uniaksiale DLCEA'er i isometriske (konstant stamme) og isotoniske (konstant kraft) konfigurationer. For eksempel, under isometriske test, de påførte indledende belastninger på DLCEA -enheder og tillod afslapning, før de påførte en højspænding til elektrisk aktivering. Under isopotentiale tests (hvor hvert punkt i en region eller et rum har samme potentiale), forskerne anstrengte DLCEA under en konstant spænding for at angive forventet aktivering.
Demonstration af uniaxial buckling DLCEA. En enaksialt justeret DLCEA spænder, når den oplades med et 2,5 kV potentiale og flader derefter ud, når elektroderne aflades. Strengen, der blev undervist i DLCEA, hjælper med at visualisere aktiveringen, men forskydes også en smule af spændingen. Kredit:Science Advances, doi:10.1126/sciadv.aay0855
Ved hjælp af den samme DLCEA, forskergruppen udførte isotoniske tests ved at suspendere en række vægte fra enhedens frie ende for at generere konstante belastningskræfter og indledende nominelle belastninger. De afladede derefter pludselig den vægtede DLCEA-enhed og fangede efterfølgende bevægelse ved hjælp af en højhastighedsvideo. Da den eksperimentelle belastning og belastning steg, kapacitansen for DLCEA steg.
Under kompleks formaktivering, grænsebetingelser spillede en væsentlig rolle for at bestemme formændringen af DLCEA. Forskergruppen forstod rollen som grænsebetingelser ved at karakterisere den bukkende effekt forårsaget af elastomerens ekspansion mellem faste grænser, de observerede stigende knækamplitude med stigende spænding. Aktiveringstoppen var også et andet karakteristisk træk for DLCEA -applikationer, forskerne målte ændringen i aktiveringsamplitude som en funktion af anvendt frekvens ved hjælp af et sinusformigt varierende 1-kV potentiale. Selvom aktiveringsamplituden faldt eksponentielt med frekvensen, forskerne målte parametrene (50 µm) ved 30 Hz og 1 kV.
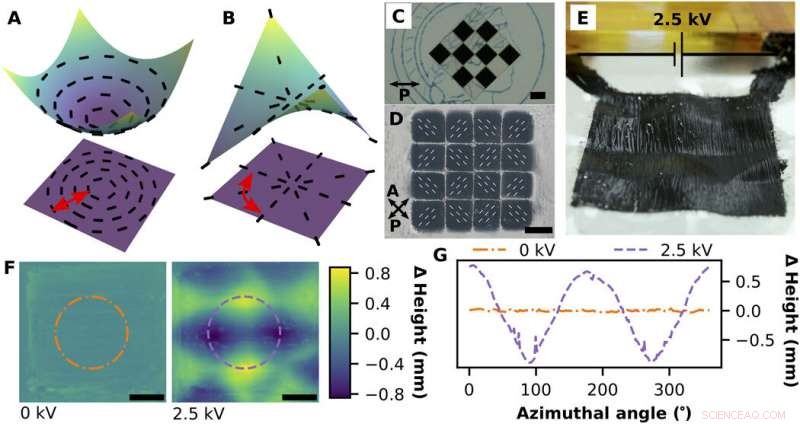
Pixeleret DLCEA. Programmeret formaktivering, såsom en fordybning i en fordybning, er muligt ved at mønstre direktørkonfigurationen til et azimuthal-radielt defekt gitter. (A) Azimuthaldefekttyper deformeres til en kegle med lokalt positiv gaussisk krumning, og (B) typer af radiale defekter deformeres til en antikegle med lokalt negativ (sadellignende) gaussisk krumning. I (A) og (B), de tohovede røde pile angiver den bløde retning. (C) Defekterne er mønstret ved hjælp af et pixeleret array af polariserende film med de designede lokale orienteringer. (D) Set gennem krydsede polarisatorer, den fremstillede LCE -film har pixeleret enaksial justering, angivet med stiplede hvide linjer, danner et defekt gitter. (E) Ved opladning til 2,5 kV, der er en stor synlig deformation af overfladen. (F) Profilometri målt højdekort over den fedtdækkede LCE er næsten flad uden beregning og varierer over 1,6 mm, når den oplades til 2,5 kV. Streg-prik- og bindestregcirklerne i (F) er spor af højde afbildet i (G). Ændringen fra omtrent konstant højde til en sinusformet varierende højde indikerer en ændring i tegn på den lokale gaussiske krumning. Målestænger, 4 mm. Fotokreditter:Zoey S. Davidson. Kredit:Science Advances, doi:10.1126/sciadv.aay0855
For derefter at demonstrere evnen til at forprogrammere komplekse mønstre i 2-D, efterfulgt af elektrisk aktivering af filmene i 3-D-former, forskerne designede rumligt varierende LCE -direktørkonfigurationer. De observerede LCE-filmen for at spænde ud af flyet med lokalt positiv eller negativ gaussisk krumning for at danne kegler eller antikegle-deformation i elastiske medier. Davidson et al. observerede den lokalt programmerede højdeændring og ledsagende dannelse af gaussisk krumning i den eksperimentelle enhed. Forskerne krediterer den observerede høje effektivitet i systemet til anisotropien af elastisk modul og Poissons forhold. Materialet Poissons forholdsanisotropi er en vigtig funktion, der kan tillade programmeret aktivering af formændringer. Efter mekanisme, den aktiverede eller komprimerede LCE kan udvide sig på tværs for at skabe en formændring. Den eksperimentelle metode, der er udviklet i dette arbejde, kan generaliseres for at skabe en lang række programmerbare formændringer. Følgelig, når et elektrisk felt påføres DLCEA, enheden kan producere snoede bevægelser, hvor størrelsen vil afhænge af materialets iboende egenskaber og af LCE -geometrien.
På denne måde, Zoey S. Davidson og kolleger kombinerede ønskede egenskaber ved DE'er og LCE'er inden for en enkelt materialeplatform for at danne elektrisk aktiverede DLCEA'er med overlegen aktiveringsydelse. Enhederne viste høj energiomdannelseseffektivitet (20 procent) høj aktiveringshastighed (120 procent pr. Sekund) og programmerbar formændring fra 2-D til 3-D med mere end 1, 800 procent slagtilfælde uden for flyet. For større aktiveringskræfter, forskergruppen overvejer flerlags DLCEA -stakke.
Den indsigt, der er givet i dette arbejde om teknikker til integration af aktive materialer og mekanismer for elektroaktivering, kan tilbyde flere spændende muligheder. Metoderne kan kobles til 3D-udskrivning, origami og kirigami aktiveringsstrategier til at skabe multifunktionelle bløde robotter med lave omkostninger og bæredygtige materialer som sparsomme opfindelser. Den udviklede mekanisme kan også anvendes på andre teknologier såsom energihøstning og -lagring, til medicinsk udstyr, bærbar teknologi og rumfart.
© 2019 Science X Network
 Varme artikler
Varme artikler
-
 Opdatering af Turings model for mønsterdannelseKredit:CC0 Public Domain I 1952, Alan Turing offentliggjorde en undersøgelse, som matematisk beskrev, hvordan systemer sammensat af mange levende organismer kan danne rige og forskelligartede rækk
Opdatering af Turings model for mønsterdannelseKredit:CC0 Public Domain I 1952, Alan Turing offentliggjorde en undersøgelse, som matematisk beskrev, hvordan systemer sammensat af mange levende organismer kan danne rige og forskelligartede rækk -
 Working Model School Projects for Solar EnergyHøstning af solenergi muliggør brug af madlavning, opladning af både store og små batterier eller tørring af tøj. Brug af solenergi kan reducere langsigtede driftsudgifter, mens du drager fordel af en
Working Model School Projects for Solar EnergyHøstning af solenergi muliggør brug af madlavning, opladning af både store og små batterier eller tørring af tøj. Brug af solenergi kan reducere langsigtede driftsudgifter, mens du drager fordel af en -
 Styring af superledende områder i et eksotisk metalForskere kan definere og tune mønstre for superledning. Kredit:EPFL Forskere ved EPFL har skabt en metallisk mikroenhed, hvori de kan definere og tune mønstre af superledning. Deres opdagelse, som
Styring af superledende områder i et eksotisk metalForskere kan definere og tune mønstre for superledning. Kredit:EPFL Forskere ved EPFL har skabt en metallisk mikroenhed, hvori de kan definere og tune mønstre af superledning. Deres opdagelse, som -
 Forskere foreslår teknik til måling af svage eller ikke -eksisterende magnetiske felterEn foreslået diamantsonde stimulerer magnetiske momenter (justerede elektroner) i det materiale, der undersøges, som derefter virker på selve sondeens magnetfelt og dermed kan måles. Kredit:Michael Fl
Forskere foreslår teknik til måling af svage eller ikke -eksisterende magnetiske felterEn foreslået diamantsonde stimulerer magnetiske momenter (justerede elektroner) i det materiale, der undersøges, som derefter virker på selve sondeens magnetfelt og dermed kan måles. Kredit:Michael Fl
- Pinterest filer fortroligt til børsnotering:rapport
- Bekymrende indsigt i kemikalierne i plast
- Science fiction bliver videnskabsfaktum, da forskere skaber flydende metalhjerteslag
- Det ældste vidnesbyrd om hestekunst i bronzealderen
- For at overtale en modstander, prøv at lytte, Berkeley-forsker siger
- Sådan fremstilles en 3D-model af åndedrætssystemet