


Lån fra robotik, forskere automatiserer kortlægning af kvantesystemer
En ionfælde, der blev brugt til forskningen i Sydney Nanoscience Hub Quantum Control Laboratory ved University of Sydney. Kredit:University of Sydney
Forskere ved University of Sydney har tilpasset teknikker fra autonome køretøjer og robotik til effektivt at vurdere ydelsen af kvanteenheder, en vigtig proces for at hjælpe med at stabilisere de nye teknologier.
Den innovative tilgang har vist sig eksperimentelt at udkonkurrere simplistisk karakterisering af disse miljøer med en faktor tre, med et meget højere resultat for mere komplekse simulerede miljøer.
"Ved hjælp af denne tilgang, vi kan kortlægge den 'støj', der forårsager præstationsvariationer på tværs af kvanteenheder mindst tre gange så hurtigt som en brute-force tilgang, "sagde hovedforfatter Riddhi Gupta, en ph.d. elev på Fysikskolen. "Hurtig vurdering af støjmiljøet kan hjælpe os med at forbedre den overordnede stabilitet af kvanteenheder."
Forskningen er blevet offentliggjort i Nature partner journal Quantum Information .
Quantum computing er stadig i sine tidlige udviklingsstadier, men lover alligevel at revolutionere teknologien ved at løse problemer uden for klassisk computing.
En af hindringerne for at udvikle disse systemer i praktisk skala er at overvinde maskinens mangler. Kvanteteknologiens grundenheder - kvantebits, eller qubits - er meget følsomme over for forstyrrelser fra deres omgivelser, såsom elektromagnetisk 'støj', og udviser ydelsesvariationer, der reducerer deres anvendelighed.
Fru Gupta, også en del af ARC Center of Excellence for Engineered Quantum Systems, har taget teknikker fra klassisk estimering, der bruges i robotik og tilpasset dem til at forbedre hardwareydelse. Dette opnås ved effektiv automatisering af processer, der kortlægger både miljøet og ydelsesvariationer på tværs af store kvanteenheder.
"Vores idé var at tilpasse algoritmer, der bruges i robotik, der kortlægger miljøet og placerer et objekt i forhold til andre objekter i deres estimerede terræn, "sagde hun." Vi bruger effektivt nogle qubits i enheden som sensorer til at forstå det klassiske terræn, hvor andre qubits behandler oplysninger. "
Inden for robotteknologi, maskiner er afhængige af samtidig lokalisering og kortlægning, eller SLAM, algoritmer. Enheder som robotstøvsugere kortlægger løbende deres miljøer og estimerer derefter deres placering inden for dette miljø for at flytte.
Vanskeligheden med at tilpasse SLAM -algoritmer til kvantesystemer er, at hvis du måler, eller karakterisere, udførelsen af en enkelt qubit, du ødelægger dens kvanteinformation.
Hvad Gupta har gjort er at udvikle en adaptiv algoritme, der måler ydeevnen for en qubit og bruger disse oplysninger til at estimere mulighederne for nærliggende qubits.
"Vi har kaldt dette 'Noise Mapping for Quantum Architectures'. I stedet for at estimere det klassiske miljø for hver eneste qubit, vi er i stand til at automatisere processen, reducere antallet af nødvendige målinger og qubits, hvilket fremskynder hele processen, Sagde fru Gupta.
Dr. Cornelius Hempel, hvis eksperimentelle team gav fru Gupta data fra eksperimenter på en endimensionel streng af fangede ioner, sagde, at han var glad for at se en tredobbelt forbedring, selv i kortlægningen af et så lille kvantesystem.
"Imidlertid, da Riddhi modellerede denne proces i et større og mere komplekst system, forbedringen i hastighed var så høj som tyve gange. Dette er et fantastisk resultat i betragtning af, at fremtiden for kvantebehandling er i større enheder, " han sagde.
Guptas vejleder er professor Michael J. Biercuk, grundlægger af kvanteteknologiselskabet Q-CTRL og direktør for University of Sydney Quantum Control Laboratory i Sydney Nanoscience Hub.
Han sagde:"Dette arbejde er en spændende demonstration af, at topmoderne viden inden for robotteknologi direkte kan forme fremtiden for quantum computing. Dette var et første skridt til at forene begreber fra disse to felter, og vi ser en meget lys fremtid for den fortsatte udvikling af kvantestyringsteknik. "
 Varme artikler
Varme artikler
-
 Magnetiske materialer til fremtidens motorerMcHenry og hans team fremstiller amorfe metal nanokompositter i hans laboratorium. Kredit:College of Engineering, Carnegie Mellon University Ifølge en statistik fra University of Chicago, 50 proce
Magnetiske materialer til fremtidens motorerMcHenry og hans team fremstiller amorfe metal nanokompositter i hans laboratorium. Kredit:College of Engineering, Carnegie Mellon University Ifølge en statistik fra University of Chicago, 50 proce -
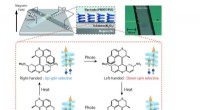 Manipulerende elektron spin ved hjælp af kunstige molekylære motorerEnsrettet rotation af den kunstige molekylmotor. Blå spiraler repræsenterer de kunstige molekylære motorer. Rotationscyklussen for den kunstige molekylmotor inkluderer 4 gange chiralitetsinversion, hv
Manipulerende elektron spin ved hjælp af kunstige molekylære motorerEnsrettet rotation af den kunstige molekylmotor. Blå spiraler repræsenterer de kunstige molekylære motorer. Rotationscyklussen for den kunstige molekylmotor inkluderer 4 gange chiralitetsinversion, hv -
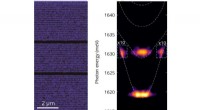 Ikke-lineære effekter i koblede optiske mikrokaviteterTil venstre:et rumligt tværsnit af den undersøgte struktur. To optiske mikrokaviteter (brede sorte striber) er synlige, omgivet af et flerlags Bragg-spejle. Billedet viser den rumlige fordeling af mag
Ikke-lineære effekter i koblede optiske mikrokaviteterTil venstre:et rumligt tværsnit af den undersøgte struktur. To optiske mikrokaviteter (brede sorte striber) er synlige, omgivet af et flerlags Bragg-spejle. Billedet viser den rumlige fordeling af mag -
 Superopløsning på alle skalaer med aktiv termisk detektionScanningsbelysning, termisk respons og superopløsningsfaktor. (a) To objekter belyses af en scanningsfokuseret energikilde med en størrelse større end objekterne eller afstanden mellem dem. (b) Den te
Superopløsning på alle skalaer med aktiv termisk detektionScanningsbelysning, termisk respons og superopløsningsfaktor. (a) To objekter belyses af en scanningsfokuseret energikilde med en størrelse større end objekterne eller afstanden mellem dem. (b) Den te
- Sukker fra modermælk kan hjælpe med at behandle, forebygge infektioner hos nyfødte
- Tiden brugt med New Musical Express falder med 72 %, efter at magasinet kun skifter online
- Forskere opretter en enhed til at identificere risici for brystkræft
- West Coast skov-jordejere vil plante mindre Douglas-gran i opvarmende klima, model viser
- Planter og dyr, der lever i floder og vandløb
- Kun hver fjerde vestromerske kejser døde af naturlige årsager