


En proprioceptiv mekanisme, der muliggør fiskelignende svømning i robotter
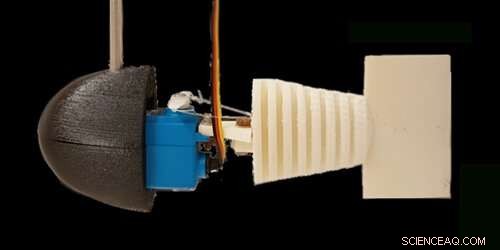
Forskernes simple robotenhed. Det hvide materiale er 3D-printet ved hjælp af deformerbare polymerer. En servomotor (blå) driver to kabler, som sørger for deformation af robotten. Den mørke del er 3D -trykt i et solidt materiale. Kredit:Sanchez-Rodriguez et al.
I løbet af de sidste par årtier, robotister har udviklet en række robotter inspireret af naturen, mennesker og dyr. For effektivt at efterligne dyr eller mennesker, imidlertid, disse robotter skal ikke kun ligne dem; de bør også bevæge sig på lignende måder.
Forskere ved Université Côte d'Azur-CNRS har for nylig introduceret en ny bioinspireret mekanisme til at opnå fiskelignende svømning i robotter. Denne mekanisme, introduceret i et papir udgivet i Fysiske anmeldelsesbreve , er baseret på det, der er kendt som proprioception, dyrs evne til at indsamle information om deres krops position, bevægelse og acceleration.
"Med mine kolleger M. Gazzola og L. Mahadevan, vi har afdækket en generel lov, der forudsiger hastigheden af makroskopiske undersøiske svømmere som en funktion af svømmegangen, dvs. amplituden og frekvensen af finn/haleslaget, "Mederic Argentina, en af forskerne, der gennemførte undersøgelsen, fortalte Phys.org . "Vores arbejde gav en rationel forklaring på denne skaleringslov, som virkede på svømmere af få centimeters længde til de største dyr, såsom blåhvaler (30m)."
For at teste deres model, forskerne ønskede at indsamle kinematiske data om halebølgedannelse, som endnu ikke er målt i levende dyr. Ud over, de var nysgerrige efter at forstå, hvilke mekanismer der gør det muligt for en given svømmer at vælge amplituden og hyppigheden af halens bevægelse. For at opnå dette, de byggede en lille kompatibel robot med en krop, der biomimetisk kan deformere.
"Denne robotplatform gav os mulighed for at validere vores skaleringslov, men også at udforske scenarier for udvælgelsen af bølgekinematik, "Sagde Argentina." Det virkede naturligt, at proprioception skulle være en fremragende kandidat, da det er en sans (nogle gange kaldet den sjette sans), der evaluerer kropsdeformation, dens acceleration eller filtkraften. I vores seneste avis, vi stillede spørgsmålstegn ved, om en feedback-loop styret af proprioception kunne udløse bevægelse, og vores arbejde viste, at proprioceptive sensorer faktisk kan fremkalde en god og stabil svømning."
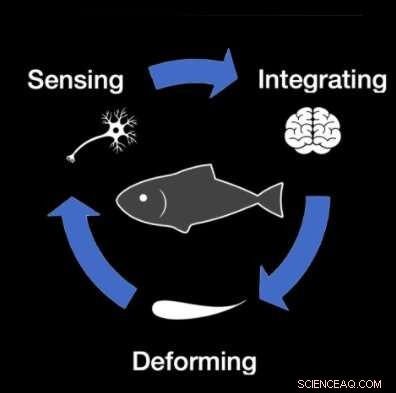
Kredit:Sanchez-Rodriguez et al.
Den primære fordel ved den proprioceptive mekanisme introduceret af Argentina og hans kolleger er, at den tillader robotsvømmere at tilpasse deres bølgeform til deres omgivende miljø, lige som mange fisk gør. Faktisk, de fleste fisk har laterale linjer, der kan måle væsketrykket på deres krop, giver dem mulighed for at integrere proprioceptive sanser.
"Vores idé var at udnytte feedbacken fra robottens følte kraft til deformationen af halen, " sagde Argentina. "Denne tilgang er således enkel, robust og kan forklare valget af svømmegange."
Forskerne testede den proprioceptive mekanisme, de udviklede på en ægte biomimetisk robot, sammenligner dens ydeevne med den, den opnåede ved brug af en generisk model til robotsvømning. Deres resultater var meget lovende, da deres mekanisme sammenlignet positivt med den generiske model og muliggjorde fiskelignende svømning i robotten.
"Proprioception kan også være det første skridt til at skabe bølgende robotter, som automatisk tuner deres kinematik til miljøet, " sagde Argentina. "Vores arbejde viste, at denne simple kobling af proprioception til halebevægelse kunne udløse en ustabilitet, der får halen til at bølge og støder svømmeren."
I fremtiden, den proprioceptive mekanisme, der er udtænkt af dette team af forskere, kunne muliggøre udviklingen af akvatiske robotter, der kan bevæge sig mere effektivt i vand. I mellemtiden Argentina og hans kolleger vil fortsætte med at arbejde på deres robot for at forbedre dens muligheder.
"Vi lærer i øjeblikket robotten at svømme ved hjælp af maskinlæringsteknikker, " sagde Argentina. "Vores første resultater giver os en masse tillid til, at vi skulle være i stand til at konstruere/designe bølgende robotter, der svømmer ved hjælp af AI."
© 2021 Science X Network
 Varme artikler
Varme artikler
-
 I fysikken, et berømt paradoks, der hænger ved en tråd af lysForestil dig en metalstang, der er blevet opvarmet i den ene ende. I stedet for at varmen gradvist spredes over hele dens længde, baren bliver til sidst varm igen på det sted, hvor den oprindeligt var
I fysikken, et berømt paradoks, der hænger ved en tråd af lysForestil dig en metalstang, der er blevet opvarmet i den ene ende. I stedet for at varmen gradvist spredes over hele dens længde, baren bliver til sidst varm igen på det sted, hvor den oprindeligt var -
 En simpel metode til at forbedre responsiviteten af terahertz-strålingsdetektorerKredit:CC0 Public Domain Forskere fra Tomsk Polytechnic University har sammen med kolleger fra spanske universiteter tilbudt en enkel metode til at forbedre responsiviteten af terahertz-stråling
En simpel metode til at forbedre responsiviteten af terahertz-strålingsdetektorerKredit:CC0 Public Domain Forskere fra Tomsk Polytechnic University har sammen med kolleger fra spanske universiteter tilbudt en enkel metode til at forbedre responsiviteten af terahertz-stråling -
 Vandets dynamiske overfladespændingFrigivelsen af en vanddråbe. Kredit:I.M. Hauner et al. En væskes overfladespænding er et mål for de sammenhængende kræfter, der holder molekylerne sammen. Det er ansvarligt for en vanddråbe, der
Vandets dynamiske overfladespændingFrigivelsen af en vanddråbe. Kredit:I.M. Hauner et al. En væskes overfladespænding er et mål for de sammenhængende kræfter, der holder molekylerne sammen. Det er ansvarligt for en vanddråbe, der -
 Forskere demonstrerer ny vej til pålidelig kvanteberegningKredit:CC0 Public Domain Forskere ved University of Chicago offentliggjorde en ny teknik til at forbedre pålideligheden af kvantecomputere ved at få adgang til højere energiniveauer end traditio
Forskere demonstrerer ny vej til pålidelig kvanteberegningKredit:CC0 Public Domain Forskere ved University of Chicago offentliggjorde en ny teknik til at forbedre pålideligheden af kvantecomputere ved at få adgang til højere energiniveauer end traditio
- Kortlægning af mulige ruter for tidlige mennesker ud af Afrika ved hjælp af klimamodeller
- Rekordsættende rumvandring ender med antennen på det forkerte sted
- Astronomer opdager den mest røntgenstrålende højrødforskydende kvasar
- Kvinder er groft underrepræsenteret i musikbranchen
- Den gennemsnitlige levetid på skeletmuskelceller
- Afdækning af vores solsystemers form